|
|

|
|
|
2013�N�@2012�N
2011�N
2010�N
2009�N
2008�N
(2014,12/27)
��NS-5000�@�R�䔭�����܂����B
�ȉ��삵�Ă��܂����B
NS-5000PKP264A2NJP�i���c���s�j�@�����o�ׂ��܂����B�ŋ߂ɂȂ�NJP���[�^���j�b�g�R��ł����������܂����B�P��͏o�ςł��B
NS-5000PKP264A2NJP�i�������s�j�@�����o�ׂ��܂����B
NS-5000ATLUX�i���A�g���N�X�p�A�D�y�s�A�A�X�g���V���b�vAu�l�j�@�����o�ׂ��܂����B
NS-501GP�i�R��@�X�^�[�x�[�X�����l�A�Q��͏o�ςł��j�c��P��͔N���ɏo�ׂ��܂��B�P���R���ɔz�B�\��ł��B�@
NS-5000USD�@���҂������Ă��܂��B�˗���̃p�l������ɖ�肪�N�����蒼���Ă��܂��B������ō���ĔN���ɔ�������\��ł��B
|
|
|
|
|
(2014,12/1)
��NS-5000�́A�I�[�g�K�C�h�E�����[�{�b�N�X�Ƃ��Ďg�����Ƃ��ł��܂��B
NS-5000�́A�����������uNS-5000�ł�����A�I�[�g�K�C�h�E�����[�{�b�N�XNS-5000�ł�����܂��B
���̂��Ƃ̓T�C�g�Ő�����������ł��܂������A�\����������Ă��܂���ł����B
�I�[�g�K�C�h�E�����[�{�b�N�XNS-5000�ɂ��āA���q���܂ƃ��[�����Ă��܂��̂ŁA���������Ȃ�܂����Q�l�ɂ��Ă������B
���q�l���(2014,10/21)
�����[�A�_�v�^�̌��ł����ADSI�@Pro�̓K�C�h�J�����ł͂Ȃ��̂�
�K�C�h�o�͂̃|�[�g�iRJ11)�������̂Ń����[�A�_�v�^�{�b�N�X�i�O�t���j���K�{�ł��B
�ʏ�̃K�C�_�[�̓K�C�_�[�����[�Œ���NS5000�ɓ��͂��Ďg���Ă��܂���
DSI
Pro�̏ꍇ������CCD�B���p�J�����Ȃ̂ł��̂悤�Ȏg���������ł��܂���B
(2014,10/21)
�Z�Z�l
�����b�ɂȂ�܂��B
>
�����[�A�_�v�^�̌��ł����ADSI�@Pro�̓K�C�h�J�����ł͂Ȃ��̂�
>
�K�C�h�o�͂̃|�[�g�iRJ11)�������̂Ń����[�A�_�v�^�{�b�N�X�i�O�t���j���K�{�ł��B
�����ł����A
�P�@DSI�@Pro���f���o���I�[�g�K�C�h�M���́APC����COM�|�[�g�ɐڑ����������[�A�_�v�^�{�b�N�X�ɑ����Ă���Ǝv���܂����H
�@�iPC�ƃ����[�A�_�v�^�{�b�N�X�̐ڑ��́ARS232C�AUSB--RS232C�ϊ��P�[�u���A�ǂ�����\�ł��B����������zCOM�ԍ��ɂȂ�܂��j
�Q�@�����āA�����[�A�_�v�^�{�b�N�X�́A�I�[�g�K�C�h�M�������A���̃I�[�g�K�C�h�M���ׂāA�I�[�g�K�C�h�|�[�g�iRJ11�j�ɏo�͂��Ă��܂��B
�R�@�����āA�I�[�g�K�C�h�|�[�g�iRJ11�j��NS-5000�̃K�C�h�[�q�́A�K�C�h�P�[�u���Őڑ�����A�I�[�g�K�C�h����������܂��B
�ȏ�̎菇�ŁADSI�@Pro����NS-5000���I�[�g�K�C�h���Ă���Ƃ������܂��B
�܂�A�ȉ��̌o�H�ŃI�[�g�K�C�h����������Ă��Ȃ��ł��傤���H
DSI�@Pro
----
USB�P�[�u��---PC�p�\�R��---�@RS232C�P�[�u��(USB�P�[�u���̉\������)----�����[�A�_�v�^�{�b�N�X---
-----�K�C�h�P�[�u��------NS-5000
��L�̃I�[�g�K�C�h�M���́ALX�Q�O�O�݊��̃R�}���h�ŁA�����[�A�_�v�^�{�b�N�X�͂��̃R�}���h�ׂăI�[�g�K�C�h�|�[�g�iRJ11�j�ɐM���ϊ����Ă��܂��B
NS-5000�́A�����[�A�_�v�^�{�b�N�X��LX�Q�O�O�݊��R�}���h��������Ă��܂��B�܂��L�̃I�[�g�K�C�h�M����F�����A���s�ł��܂��B
�܂�A�ȏ�̃I�[�g�K�C�h�o�H�́A�ȉ��ɒu�������邱�Ƃ��o����Ǝv���܂��B
DSI�@Pro
----
USB�P�[�u��---PC�p�\�R��---�@RS232C�P�[�u��-------NS-5000
(2014,10/21)
>NS5000�̃K�C�h�|�[�g�iRJ11�j�͎g�킸�K�C�h�ł���킯�ł��ˁB
>���̑��RS232C�ƃm�[�gPC���Q�d�ɂȂ��킯�ł����H
�����[�A�_�v�^�{�b�N�X���g�킸�ANS-5000�ƒ�������Ȃ�A�K�C�h�|�[�g�͎g���܂���B
�������K�C�h�P�[�u�����K�v����܂���B
NS-5000�͎����������u�ŁA�ڑ��ł���̂́A���}�A�v�������Ǝv���Ă���l�����������m��Ȃ��ł��ˁB
���́A�I�[�g�K�C�h�A�v���ɂ��ڑ��ł��܂��B
�����l����ƕ�����₷���ł��B
PC��COM�|�[�g���烊���[�A�_�v�^�{�b�N�X���g�����I�[�g�K�C�h�V�X�e����
PC��COM�|�[�g���猩��NS-5000�́A�قړ������̂ł��B�������������܂��B
�iNS-5000�̒��Ƀ����[�A�_�v�^�{�b�N�X���������Ă���A���̒��ŃK�C�h�[�q�Ɛڑ�����Ă���ƃC���[�W���Ă��������j
�ł�����A
���݃����[�A�_�v�^�{�b�N�X���q���ł���COM�|�[�g��NS-5000��ڑ����邾���ŃI�[�g�K�C�h���ł��܂��B
2�d�ɂȂ��̂́ANS-5000�͐��}�A�v�����玩���������u�Ƃ��Ă������܂��̂ŁA���̂��߂̐ڑ���1�`�����l���g���܂��B
������́A�I�[�g�K�C�h�Ɏg���܂��B
1�`�����l���ł́A���������ASN9����I�[�g�K�C�h�A�v���ɐؑւ����Ԃ��߂�ǂ����Ǝv���܂��B
NS-5000�̒ʐM�@�\�́A2�`�����l�����Ɨ����ē����܂��B
�܂�A���}�A�v���Ɛڑ�������ԂŁA�I�[�g�K�C�h�����s�ł��܂��B
�������A2�`�����l�����݂��ɖ������铮��͂ł��܂���B
�Ⴆ�A�I�[�g�K�C�h���Ɏ��������͂ł��܂���B
�u���͌��s�V�X�e���ō��������Ƃ�����܂��B
MaxIm�@DL��DSI�@Pro�@�Ɓ@LX200�@Mount�ŃK�C�h�ݒ肵��
MaxIm�@DL�ŃL�����u���[�V�������s���ƁA�L�����u�R�}���h�����
�����[�{�b�N�X�ɍs���̂ł����A�A���I�ł͂Ȃ����߁AMaxIm���s�N�Z���ړ��ʂ�
”�T�s�N�Z������”�Ƃ����G���[���Z�[�W���o�āA�L�����u���[�V�����ł��܂���B
��L�V�X�e���ύX�����MaxIm
DL�ł��K�C�h���\��������܂���B
���s�ł�PHD�Q�@Guiding�ŃK�C�h���Ă��܂��BPHD�̏ꍇ�̓L�����u���[�V����
�M�����A���I�ɏo�܂��̂ŁA�L�����u���[�V�����ł��܂��B
�ȑO��PHD�ɔ��PHD2�͔���I�Ɏg���₷���Ȃ�܂����̂�
PHD�ł������̂ł����A�ł����MaxIm�@DL���g�������ł��ˁB�v
�������邩������܂��A�Z�Z����̌��݂�NS-5000�Ŋm�F�ł��܂��B
�����[�A�_�v�^�{�b�N�X�̑����NS-5000���q���ŃI�[�g�K�C�h�������ĉ������B
��낵�����肢���܂��B
��A���q�l���烁�[�����͂��܂����B(2014,10/21
21:22)
��������
MaxIm
DL�Ŏ������܂����B
���s��RS232C�|�[�g���f�o�C�X�T�[�o�[��ŋ��L���Ď����܂����B
�����I�ɕύX���܂���ŃT�[�o�[��̃R���g���[���\�t�g�ɂ��ύX�ɂȂ�܂��B
�����[�{�b�N�X�̃|�[�g��COM1�ŃA�X�R���o�R��PHD�ɐڑ�����ꍇ
COM1�����g���܂���B���NS5000��COM�S�Őڑ����Ă��܂��B
Maxim
Dl��Ń����[�{�b�N�X�ɐڑ�����ꍇCOM1��LX200�Őڑ��ł��܂��B
NS5000��COM4�ł��̂�SN9�Ƌ��p��SN�X�̐ڑ�����Ă���COM4��
MaxIm
Dl�Őڑ����܂��ƂȂ�Ƃ����Ɠ��삵�܂����B
NS5000�Ă������ł��ˁI���ۂ܂�����Ŏ������Ă��܂���̂�
Maxim
DL��ŃL�����u���[�V�������������邩�킩��܂���
���ꂽ��������Ă݂܂��B
���q�l���(2014,11/4)
��������
�����b�ɂȂ�܂��B
���NS5000�����[�{�b�N�X�{MaxImDL�{DSI�@Pro�œ���e�X�g�������Ȃ��܂����B
�Z�Z�̃����[�͐ڑ��͂ł��܂������A�ǂ������킯���AMaxImDL��ł�
�L�����u���[�V�������o���܂���ł����B����MaxIm�ł͎g���܂���B
NS5000�͊����ɓ��삵�܂����B��ϖ������ׂ����ʂł����B
MaxImDL�͐ݒ莟��ő�ώg���悢�K�C�h�\�t�g�ł��ˁB
(2014,11/29)
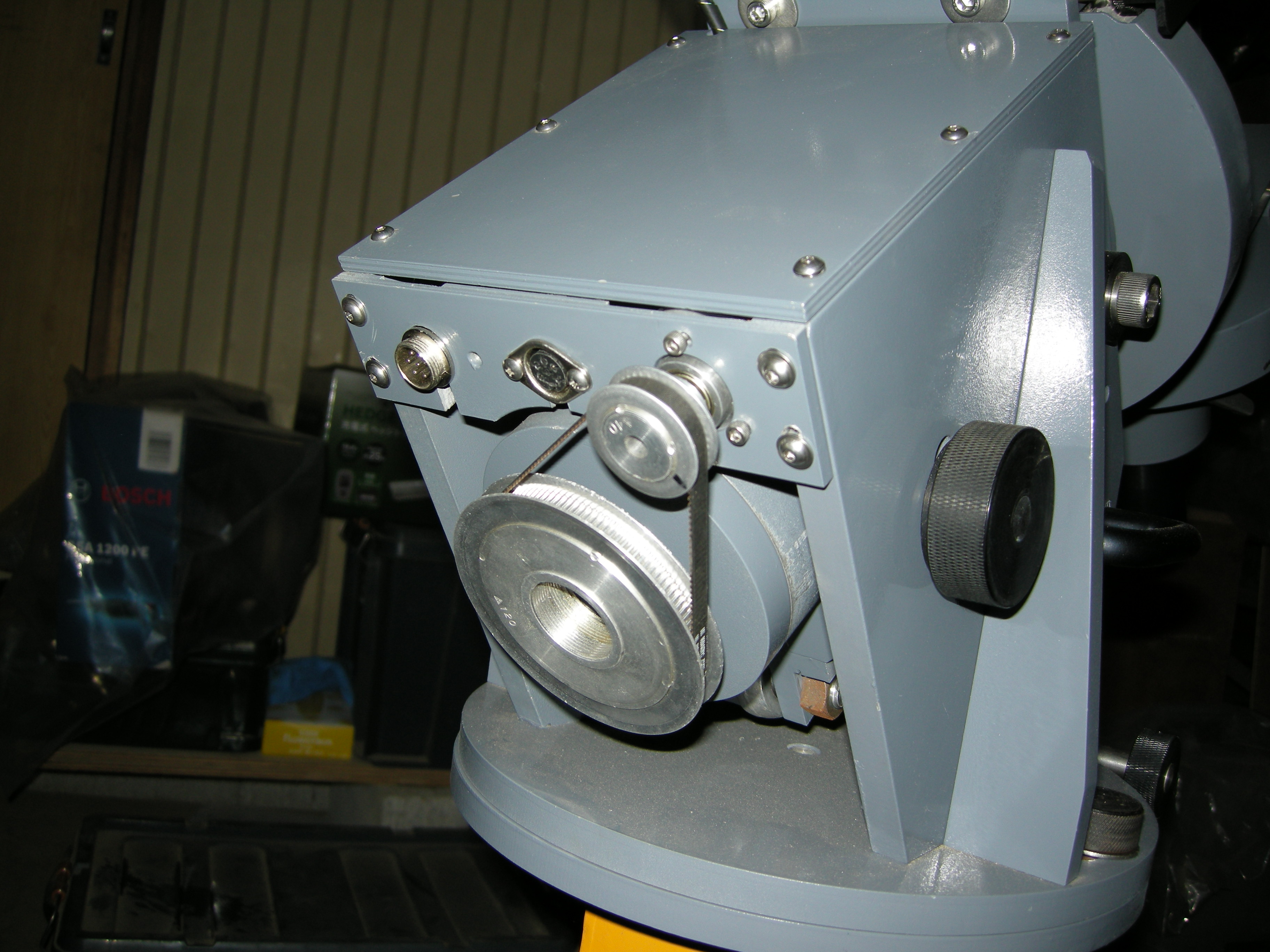
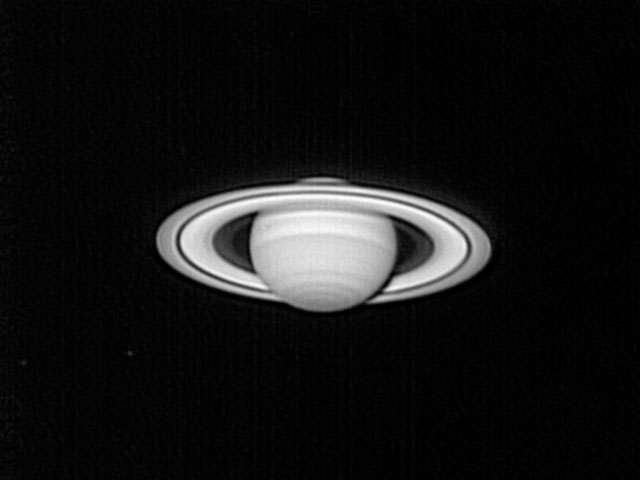
���J������NJP�x���g�h���C�u�ŃI�[�g�K�C�h���s���܂����B
�x���g�h���C�u������NJP���[�^���j�b�g���J�����Ă��܂��B
����i�ŃI�[�g�K�C�h�B�e���s���܂����B�ȉ��͂��̃��|�[�g�ł��B
(2014,11/26)
�x���g�h���C�u�ł�����{�I�ȓ���̊m�F�Ƃ������Ő���i�P�P/�Q�R�̖�j�ɍ�����Z�Z�l��
���쌧�����x�����̔���㍂���ɉ����B�e�ɍs���Ă��܂����B�W���P�V�O�O���Ŗ锼�߂���
�����ɂȂ�܂����̂ŋC���́|�T����NS-5000�̃x���g�h���C�u�d�l�̎���i�̐��\�m�F
�ɍD�s���ł����B
�摜�����̃��x���������҂Ȃ̂ŊG�̏o���h���ɓ�L��܂����ʐ^��Y�t���܂��B
�����Q�Q�T�O�����̒��œ_�������ԃK�C�h�o����Ζw�ǂ̂��q�l�̗v�������Ă���
�̂ł͂Ȃ����Ǝv���܂��B
�B�e�����F2014/11/24�@AM0�F30�`4�F30
�B�e�ꏊ�F����㍂���@���X�g�n�E�X�@�ӂ邳�ƒ��ԏ�
�����F����15����/�e15�i��=2250�����j�A�N���}�[�g�iDKD���j
�J�����FFLI�@ML-16803�@�i-35���j
�t�B���^�FRGB�FAstrodon�@Tru-Balance�@50�����p
�@�@�@�@�@Hα�FBAADER
7nm�@50�����p
�t�B���^�t�H�C�[���FFLI�@CFW-4-5
�ԓ��V�FTAKAHASHI�@JP
MD�@�@�FNS-5000�@�x���g�h���C�u�d�l�i����i�j
�K�C�h�J�����FQHY5L-�U-M
�K�C�h���F5cm/200�����@�t�@�C���_�[
�E�n�����_
�@G�F10���i2�r�j���O�j��2���R���|�W�b�g
�@B�F10���i2�r�j���O�j��2���R���|�W�b�g
�@H���F20���i�r�j���O���j��2���R���|�W�b�g
�@Ha��R�摜�Ƃ���RGB������A�ēxHa��L�摜�Ƃ���LRGB����
�E�K�N���_
�@R�F10���i2�r�j���O�j��1��
�@G�F10���i2�r�j���O�j��1��
�@B�F10���i2�r�j���O�j��2���R���|�W�b�g
�@H���F20���i�r�j���O���j��2���R���|�W�b�g
�K�C�h��PHD2�ōs��MaxIm
DL�Ŏ����B�e���܂����B
�K�C�h�o�͂͊O�t�������[�{�b�N�X�͎g�킸NS-5000�ōs���Ă��܂��B
���܂��Z�Z�̃����[�{�b�N�X���g���Ă����̂ł����iUSB�ڑ���
PIC�}�C�R�����g��ASCOM�o�R��SS-2000PC�Ƃ��ē��삵�t�H�g�J�v���\��ON/OFF����
���̂Ō��\�g���Ă���l�����܂��j�@�Z�Z�l����������NS-5000�������[�{�b�N�X
�Ɏg����Ƃ̂��b�����ۂɂ���Ă݂��Ƃ��뒲�q���ǂ��Ƃ̎��Ŏ����ւ��Ă݂܂����B
���܂ł̃����[�{�b�N�X��背�X�|���X���ǂ��悤��PHD2�̃L�����u���[�V�������Ԃ�
�������炢�ɒZ���Ȃ�܂������K�C�h���x���ǂ��悤�ł��B
��L�������[�{�b�N�X�̂��Ƃł����ANS-5000�̓����[�{�b�N�X�Ƃ��Ă����삷�邱�Ƃ��ł��܂��B
�Ⴆ�A���}�A�v���i�X�e���i�r�Q�[�^�Ȃǁj�́ANS-5000�Ɛڑ����Ď��������ł��܂��B
�������A�I�[�g�K�C�h�A�v���iPHD2�Ȃǁj�́ANS-5000�Ɛڑ����ăI�[�g�K�C�h���邱�Ƃ��ł��܂��B
��ŏڂ������������Ă��������܂��B
|
|
|
��NS-5000PKP243A1NJP�p���[�^���j�b�g���J�����Ă��܂��B
�v���g�^�C�v�ł��B�܂����[�^�J�o�[���t���Ă��܂���B�M�A�ގ��͕ύX����\��������܂��B
���[�^��PKP243A1
SG18��\�肵�Ă��܂���SG36�ɂ��邩���m��܂���B
SG36�̏ꍇ�́A���e�g���N�͕ς��܂��A���悻SG18�̂Q�{�̏o�̓g���N������܂��B
|
|
|
(2014,11/24)
��NS-5000/501
�S�䐻�삵�Ă��܂��B
�قڊ������܂����B
NS-5000PKP264A2NJP�i�����s�j�@�����H��֔������܂��B
NS-5000EM10�i�F�s�{�s�j�@�p�l���쒆�ł��B�����������҂����������B
NS-501GP�i���ˎs�j�@�����������܂��B
NS-5000USD�@���p���̖ڏ������܂����̂ł��q�l�ɂ��ē�����\��ł��B��P�O�O�{���Ŏ��������ł��܂��B
|
|
��DOG
NS-5000 v2
CPU�{�[�h��v���Ă��܂��B
���̎d���̓s���Œ��f���Ă��܂����A���������̂Ƃ���܂ł��܂����B
�RD�\��������̗l�q�ł��B
|
|
(2014,11/19)
��NS-5000�o�b�N���b�V������������B
NS-5000U150�������p�̂��q�l����A�o�b�N���b�V���ɂ��Ă��₢����������܂����B
�I�[�g�K�C�h���鎞�A�o�b�N���b�V����@�\�̗��p���@�ɂ��ĎQ�l�ɂȂ�܂��̂ł��Љ�܂��B
(2014,11/15)
�V��Ɍb�܂ꂸ�A���ۂ̐���œ���m�F�����܂�ł��Ă��܂��A200�{
�œ��������Ė��Ȃ����삵�Ă��܂��B�܂��܂��]�T�͂��肻���ł����A����
�[�g�Ŏg�����Ƃ��l����A���S������Ă��̐ݒ�ʼn^�p�������ł��B��
�p�I�ɂ͏\���ȃX�s�[�h�Ȃ̂ŕs���͂���܂���B�܂��A�������x���v������
��|�|�ŏ��͉𑜓x��15�b�p�ƕ����Ă����̂ŕs���������̂ł����|�|�ɍ���
�������Ă��܂��B�ȑO�̃V�X�e�����i�i�ɐ��x�͏オ���Ă��܂��B
NS-5000U150�́A�o��1/16�}�C�N���X�e�b�v�A�P����192pps�ɂ��Ă��܂��B
1/8�}�C�N���X�e�b�v�i96pps�j�ɕύX����A300�{���ȏ��o��\��������܂��B
���ꂩ���U�����J�����g�_�E�������{�����[��������܂��̂��S�z�Ȃ��Ǝv���܂��B
(2014,11/16)
>
�܂��A�������x���v�����ȏ�|�|�ŏ��͉𑜓x��15�b�p�ƕ����Ă����̂ŕs���������̂ł����|�|�ɍ���
>
�������Ă��܂��B�ȑO�̃V�X�e�����i�i�ɐ��x�͏オ���Ă��܂��B
�����ł��B
�������x�ɂ��ẮA�����͂����Ȃ�܂��A�قڊԈႢ�Ȃ��ڕW�V�̂�±15"�͈̔͂ɓ����Ă���Ǝv���܂��B
�덷�͐Ԍo�Ԉ��̒��x�A�Ɏ��A��C���A�]�����̃K�^�A�^���~�A�o�b�N���b�V���E�E���������Ă���Ƃ������܂��B
>�@
���āAPHDGuiding�Q���g���Ă��ĐԈܕ����ɂقƂ�Ljړ����Ȃ����ۂ�����
>
�܂����B�L�����u���[�V�������ɃL�����u���[�V�������Ԃ�250mm�Ō��ۂ���
>
�����A750mm�ł͐���ɓ��삵�܂����BPHDGuiding2�����낢�����Ă��邽��
>
�ł͂Ȃ����Ǝv���̂ł����A���̂Ƃ��ANS-5000�̃o�b�N���b�V���ʂ��O�ɂ�
>
�Ă������Ƃ��C�ɂȂ�̂ŁA�o�b�N���b�V���ʂɂ��ċ����Ē����܂����B
>�@
�Ԍo�o�b�N���b�V����(:/BR#)�A�Ԉ܃o�b�N���b�V����(:/BD#)�̒l�͂ǂ̂�
>
���ȓ���������l�ł����B�[���ɂ���Ƃǂ̂悤�ȓ����ɂȂ�̂ł����B�܂��A
>
�X�s�[�h�e�[�u���ɂ̓o�b�N���b�V������x�Ƃ����̂�����܂����A���̒l
>
�̓����ƃo�b�N���b�V���ʂƂ͂ǂ̂悤�ȊW�ł����B�����̃o�b�N���b�V
>
���Ɋւ���l�̓K�C�h�|�[�g�ɓ����Ă���M���œ��R�L���ł���ˁB
�����Ă��̃��[�^�̓o�b�N���b�V��������܂��B
���́A�I�[�g�K�C�h�A�蓮�K�C�h���ɁA�o�b�N���b�V���̉e���ŁA�Ԉ܃��[�^�����炭�������Ȃ��Ȃ邱�Ƃł��B�i����j
�Ԉ܂��C����������ƁA�o�b�N���b�V�������āA�����o���܂��B
���ۂ̖��́A���̋��莞�Ԃɂ���܂��B�o�b�N���b�V���������Ă��A���̎��Ԃ���������Ζ�肠��܂���B
NS-5000�̃o�b�N���b�V����@�\�́A���̎��Ԃ����炷�̂��ړI�ł��B
�o�b�N���b�V���ʂ́A��̓I�ȁ@�o�b�N���b�V���p���X�@�ŕ\�����Ƃ��ł��܂��B
���Ƃ���U150�Ȃ�A
�P�������x192pps
�܂�A�P�p���X�p�x�@=
15" ÷�@192
=
0.078"
���ɋ��莞�Ԃ�3�b�������Ɖ��肵�āA���̎��̃K�C�h�X�s�[�h��0.5�{���Ȃ�A
�o�b�N���b�V���p���X�@�́A�@�@�@�@(192
�@0.5)
× 3 = 288 �p���X
�o�b�N���b�V���p�x�Ɋ��Z����Ɓ@288
�@0.078"
= 22.464"�@
�ɂȂ�܂��B
�iPKP264/243�Ȃǃn�C�u���b�h�^�̓o�b�N���b�V���͔�r�I���Ȃ����ł��B�������APM�^���[�^�{�ԓ��V�ł͂T�b������̂�����܂����B�j
�܂�A�o�b�N���b�V���͂Q�W�W�p���X�����肵�Ă��邱�ƂɂȂ�܂��B
���̃p���X�͋@�B�I�Ȑ����A�M�A�̊��ݍ��킹�E�E����łĂ��܂��̂ŕϓ�����\��������܂����A����������肵�Ă���ƍl���Ă��܂��B
���̃p���X��0.5�{���ŏC�������3�b������܂��B����ł͈Ӗ����Ȃ��̂ŁA���̊Ԃ����A�C�����x�𑬂�����A
0.5�{���Ȃ�@3�b�B
1�{���Ȃ�@
1.5�b�B
4�{���Ȃ�@
0.37�b
12�{���Ȃ�@��0.1�b�ƂȂ�܂��B
�����͌v�Z�ʂ�ɍs���܂��A���ʂ�����܂��B�i�A�i���O�I�ȕω�������悤�ł��j
NS-5000�̃o�b�N���b�V����ʂ́A�ȏ�̃o�b�N���b�V���p���X�̂��Ƃł��B
�܂��A�o�b�N���b�V������x�́A�ȏ�̏C�����x�̂��Ƃł��B�ʏ�͂P�Q�{���ł��B�ύX�\�ł��B
(:/BR#)�@(:/BD#)�@��0�Ȃ�A�o�b�N���b�V����͍s���܂���B���ʂ̂Q�����[�^�h���C�u�Ɠ����ł��B
������ɂ��������m��܂��A�Ԍo�ɂ��o�b�N���b�V�������݂��܂��B
�I���G���^���̃��[�^�́A�o�b�N���b�V���ʂ����Ȃ��悤�ł��B
NJP�̏ꍇ�A�o�b�N���b�V���O�ɂ��ăI�[�g�K�C�h�ŗǂ����ʂ��o���Ă��邨�q�l�������܂��B
�������A����͂��g���̃I�[�g�K�C�h�V�X�e���A�I�[�g�K�C�h�̃p�����[�^�ƊW���Ă���\��������܂��B
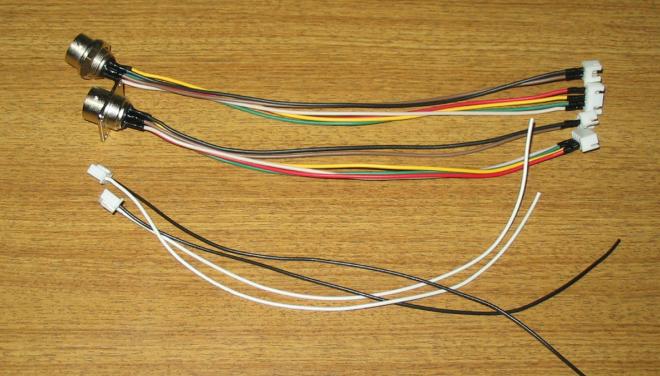
��bluetooth�A�_�v�^NS-400��p�P�[�X�����܂����B
�P�[�X���H���ʓ|�������̂�11/5�ɉ��H���˗����܂����B�P�T���ɉ��H�σP�[�X���������܂����B
�l�W���̂��Ƃ�Y��Ĉꕔ�C�����K�v�ł������A�Ȃ�Ƃ��Ȃ�܂����B�O�ς͂��܂����ł����ړI�͎������܂����B
RS232C�R�l�N�^�A�I�[�g�K�C�h�[�q�iRJ-11�AST-4�݊�
�j���t���Ă��܂��B
�܂��A�I�[�g�K�C�h�̏�Ԃ�LED�����v�S�̓_���ŕ�����܂��B
�߂��A�^�J�n�VTEMMA�p���܂߂Ă��ē��������܂��B
|
|
(2014,11/14)
���^�J�n�VUSD�pNS-5000�̂��₢���������������܂����B
�́A�����������Ƃ�����܂����v���悤�Ȍ��ʂ��o���Ȃ������̂ŁA����ȗ�USD�ɂ��Ă͑Ή����Ă��܂���ł����B
���̌�A�쓮�d���ɂ��ăf�[�^�������Ă��܂����̂ŁA������x�����܂��B
NS-5000USD����邩�ǂ����́A�e�X�g���ʂŌ��߂����Ǝv���܂��B
|
|
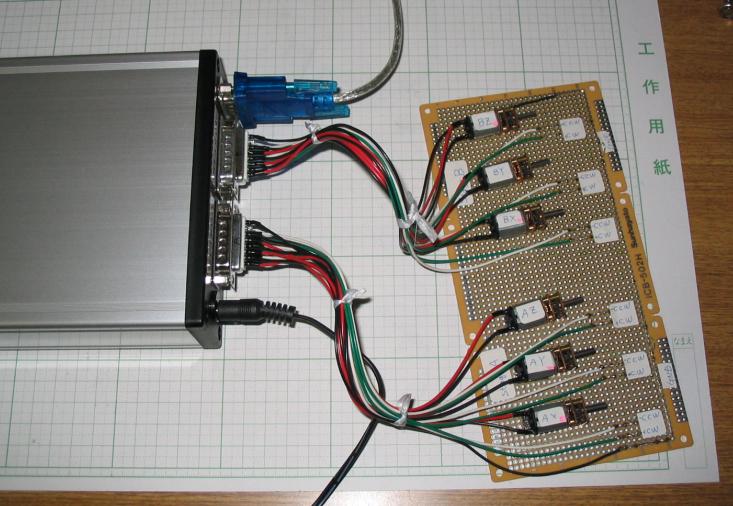
��I2C���W���[�����w�����܂����B
I2C�̎����p�Ƃ��ĂQ�̃��W���[�����w�����܂����B������g����I2C�̃v���O���~���O�A����e�X�g���s���܂��B
�t�����W���[���i�P�U�����A�Q�s�j����������ANS-5000��NS-300�f�W�^���\����ɂ��̂܂�t���邱�Ƃ��ł���悤�ɂȂ�܂��B
I2C���W���[���͊e��̔�����Ă��܂��B�Ⴆ�AI2C�������A�o�b�N���C�g�t�\����AGPS�A�f�W�^���R���p�X�A���x�Z���T�[�E�E�E�B
|
|
��NS-300�f�W�^���\�������t��������ԓ��V�̎ʐ^���͂��܂����B(2014,11/2)
���q�l�͂���܂łR��̐ԓ��V�����삳�ꂽ�����ł��B�P���NS-5000�{�T�����[�^�h���C�u�B�i2008,11/2�j(2011,6/30)�̋L�����������������B
�����č��x��NS-300����t�����ԓ��V������܂����B
|
|
|
|
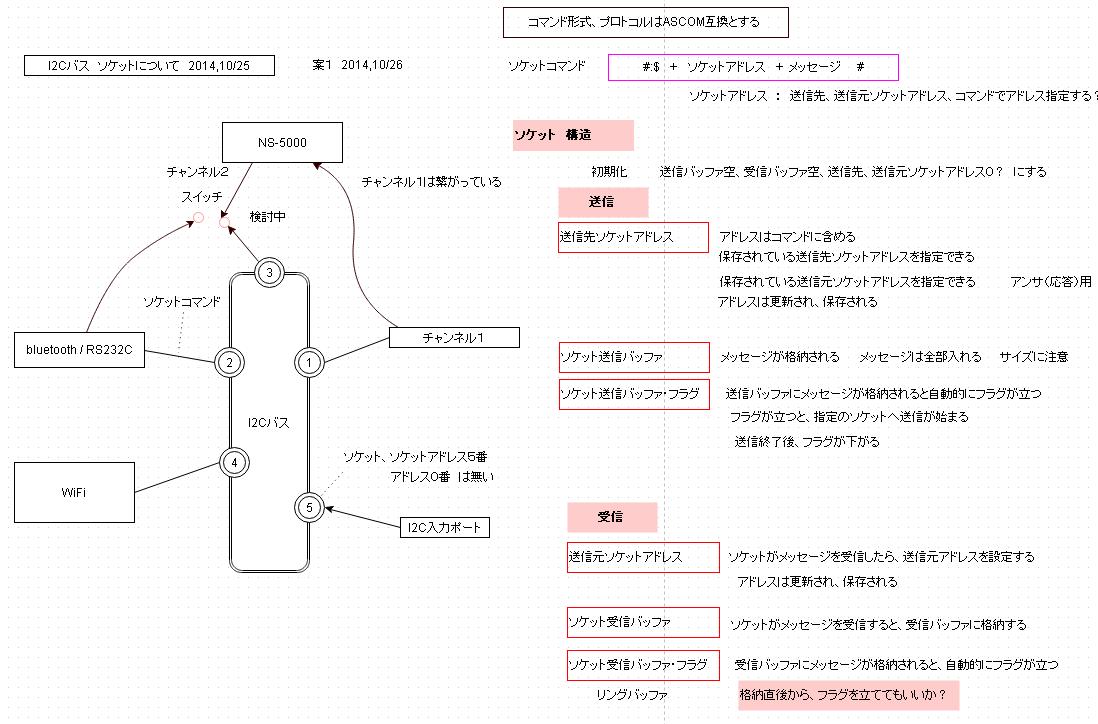
(2014,10/26)
��v2
CPU�{�[�h��I2C�C���^�[�t�F�[�X�ɂ��Č������܂����B
I2C�͕�����I2C���W���[�����ڑ��\�ŁA�����̃��W���[���ԒʐM���ł��܂��B
�ǂ����p����Ă���C���^�[�t�F�[�X�ł����A���̂܂܂ł͎g���Â炭�@�\���������̂���������ł��B
�����ł܂���̘b�ł����AI2C�ɂ��Č������܂����B
�ȉ��̗l��I2C�o�X�A�\�P�b�g�Ƃ������̂��l���Ă݂܂����B
I2C�o�X�𗘗p����R�}���h��ASCOM�Ɠ����v���g�R���ɂ���\��ł��B
�v���g�R���������Ȃ�A�J���ς݂�NS-5000�v���O���������p�ł��܂��B
�}�̂悤�ɍ�邱�Ƃ��ł���APC�AAndroid�A�v������AI2C�o�X�̊e���W���[�������R�ɗ��p�ł���悤�ɂȂ�͂��ł��E�E�E�B
|
|
(2014,10/24)
���K�C�h�J�����g�_�E���@�\���������܂����BVer6.29
NS-5000�́A�J�����g�_�E�������{�����[���ōP�������ŏ��g���N�ɍ��킹�邱�Ƃ��ł��܂��B(2014,7/13)
�̋L�����������������B
����͍P�����ǔ��̒�U�����Ɍ��ʂ�����܂��B
����́A����ɃK�C�h�J�����g�_�E���R�}���h�����A�K�C�h�i�����A�����j�ł��ŏ��g���N�ɐݒ�ł���悤�ɂ��܂����B
;�K�C�h�J�����g�_�E���R�}���h
#:=E#�@
0:�����@�@1:�K�C�h�J�����g�_�E���L���@�@Ver6.29
�lj�
(2014,10/22)
#:=E0#
�����ɂ���
#:=E1#
�K�C�h�J�����g�_�E���L���ɂ���
�K�C�h�J�����g�_�E����L���ɂ���ƁA�I�[�g�K�C�h�S�́i�P�����ǔ��A�Ԍo�K�C�h�X�s�[�h�����A�����j��K�v�ŏ��g���N�ŋ쓮���邱�Ƃ��ł���悤�ɂȂ�܂��B
�����炭�A���܂ł�����U���ŁA�Â��ȃI�[�g�K�C�h�����������̂ł͂Ƒz�����Ă��܂��B
�܂��ANS-5000�̏���d�͂�����܂��̂Ńo�b�e���̎������ǂ��Ȃ�Ǝv���܂��B
���q�l����̔������y���݂ł��B
NS-5000�́A�V����Ver6.29�Ƀo�[�W�����A�b�v
���܂����B
Ver6.27�̕s��ł����f�����|���������q�l�ɂ͂���������ē����܂��B
(2014,10/23)
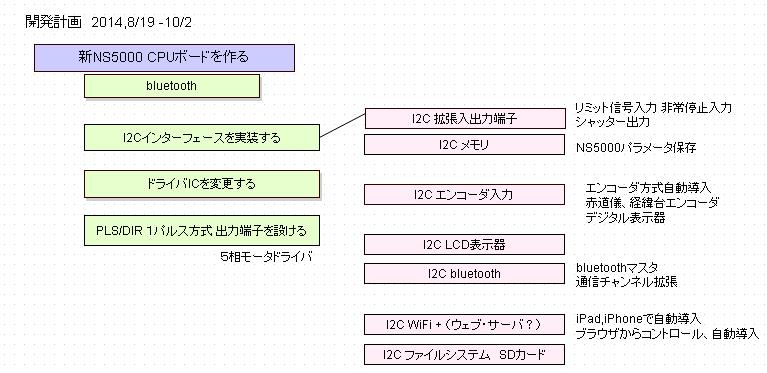
��DOG
NS-5000
v2 CPU�{�[�h��v���܂����B
NS-5000���h���C�oIC�������ړI�ł����ꕔ���ǂ���CPU�{�[�h�̉�H�����߂܂����B
v2
CPU�{�[�h�͈ȉ��̗l�Ȃ��̂ł��B
�P�@���݂�CPU�{�[�h�ƌ݊���������A�������邱�Ƃ��ł��܂��B
2�@RS232C�|�[�g��bluetooth�i�I�v�V�����j�Q�`�����l���������܂��B
�@�@���̃{�[�h�Ɠ����ł����Abluetooth�͐��i�ł�NS-400���������邱�Ƃɂ��܂����B
3�@�����̋@�\�A�b�v�̂��߂�I2C�C���^�[�t�F�[�X��������܂��B
�@�@���̂Ƃ���I2C���W���[������������̂ŁA�Ƃ肠����I2C�R�l�N�^���������A����ɃT�u�{�[�h���ڂ��邱�Ƃ��ł���悤�ɂ��܂��B
�@�@�܂�bluetooth�̃V���A���|�[�g�A���̑��R���g���[���M�����z�����܂��B
4�@�R���g���[���|�[�g�i�t�H�g�J�v���j��p�ӂ��܂��B����Ńf�W�J���V���b�^�[���䂪�\�ɂȂ�܂��B
5�@���̃{�[�h�͓d���Ƃ���5V,3.3V�����݂��Ă���̂ł����A�������{�I��3.3V�n�ɓ��ꂷ��\��ł��B
�@�@3.3V�n�ɂ���A�����ł�PIC24E
CPU�𗘗p���邱�Ƃ��\�ɂȂ�܂��B
�����O�ɁAPIC24EP64GP��NS-5000�t�@�[���E�G�A���ڐA�A�e�X�g���܂����B
�������������悤�ɂȂ����̂ł����A���̂��HNEW�R�}���h�����s����ƁA�t���b�V��������������o�O���o�Ă��܂��B
�o�O�́A�V�����c�[���Ƃ���MPLAB����MPLAB
X�ɕύX�����̂������Ǝv���܂��B���Ƀ����J�̓����ɈႢ�����肻���ȋC�����Ă��܂��B
6�@���[�^�h���C�o�M�����o�͂ł��܂��B�P�p���X�����@PLS/DIR�A�܂��͂Q�p���XCW/CCW���\�ł��B�i�I�v�V�����j
�@�@�I���G���^���̂T���X�e�b�s���O���[�^�h���C�o�Ƃ��T�[�{���[�^�Ȃǂ��쓮���邱�Ƃ��ł��܂��B
�@�@�`���U�O�����t�H�[�N���ԓ��V�ASHOWA20E�A�ܓ����wMX-II�ԓ��V�̎��т�����܂��B
(2014,10/10)
��Ver6.27���s����������܂����B
����A�o�O��������������A�v���O�������C�����A����ɓ����悤���Ȃ�܂����B
���ꂩ��A�s��̌��������낢�뒲�ׂĂ��܂������A�o�ܑ䃂�[�h�ł��n���P�������v���~�܂��Ă��܂����B
���߁A���̎����ǂ������ł��Ȃ������̂ł����A�v���Ԃ�Ɍo�ܑ䃂�[�h�̎d�g�݂��v���o�����ƂŁA���ꂪ���킾�ƕ�����܂����B
�o�ܑ�ł͒n�����W�n�̂��߁A�����^���ƊW���Ȃ��̂ŁA�P�������v���~�߂Ă��܂����B
���ꂪ���������ŁA�s��̏ꏊ�����ł��܂����B
����̕s��͂��̍P�������v�̈�����Y��Ă������Ƃł����B
NS-5000�́A�ԓ��V���[�h�A�o�ܑ䃂�[�h������AVer6.27�ł���Ƀt�H�[�N���ԓ��V���[�h���lj�����܂����B
�o�ܑ�ł͒n�����W�n�̂��߁A�P�������v���~�߂܂��B
�������A�ԓ��V���[�h�A�t�H�[�N���ԓ��V���[�h�͍P�������v��K���L���ɂ��Ȃ���Ȃ�܂���B
�Ƃ��낪�A�ԓ��V���[�h�ȊO�́A�S���P�������v�͒�~�ƃv���O��������Ă��܂����B
�������́A�o�ܑ䃂�[�h�������~�A�ԓ��V���[�h�A�t�H�[�N���ԓ��V���[�h�͗L���ɂ���ł��B
������������A�����ȒP�Ȃ��Ƃł������A������Â炢�o�O�������Ǝv���܂����B
���A�e�X�g���ł��B�ǂ������Ȃ��悤�ł��B����S���Ă���Ƃ���ł��B
�V�����lj������t�H�[�N���ԓ��V���[�h�ɂ͖�肠��܂���ł����B
���������m�F������A�V����Ver6.28�o�[�W�����A�b�v
���s���܂��B
�܂������f�����|���������q�l�ɂ́A��قǘA�������Ă��������܂��̂ŁA��낵�����肢���܂��B
�C���ӏ��͈ȉ��̈�s�ł��B
;
cjner_ _sys_mode,#0,xy_stop_timer ;1:�o�ܑ䃂�[�h�ł́@�P�������~�߂�@NS-500�@�lj�
<<�t�H�[�N���ԓ��V���[�h�lj��ɂ��폜2014,10/9
cjer_
_sys_mode,#1,xy_stop_timer
;1:�o�ܑ䃂�[�h�̎��ɂ̂ݍP�������~�߂�ׂ��ł���@2014,10/9
;0:�ԓ��V���[�h
;2:�t�H�[�N���ԓ��V���[�h
|
|
(2014,10/8)
��NS-5000
Ver6.27���t�H�[�N���ԓ��V���[�h�ɕs���������܂����B
�o�[�W�����A�b�v���Ă��܂���NS-5000�@Ver6.27�ł����A
���q�l��������A���ɂ��A�V�������������t�H�[�N���ԓ��V���[�h�ɕs������邱�Ƃ��킩��܂����B
�ƂĂ���{�I���Ǐ�Ȃ̂ł����������Ă��܂����B
�t�H�[�N���ԓ��V�������Ă��Ȃ��̂ŁA�e�X�g�͐�琯�}�\�t�g�ōs���Ă��܂��B���ꂪ������Ǝv���܂��B
�t�H�[�N���ԓ��V���[�h�ɂ����āA�P�����ǔ����̍��W�i�Ԍo�j�����ɂȂ炸�A
��������A���X�ɐԌo�l�������Ă��܂��ǏłĂ��܂��B
�i�P�����ǔ��͂��Ă��܂����A�܂�ōP�����ǔ����~�܂��Ă��鎞�̗l�Ȋ����ł��H�j
�P�����ǔ����ɉ�����Ԍo�l�́A�����^���ɂ����W�̕ω������[�^�ǔ��őł������ω����邱�Ƃ͂���܂��A
���ꂪ�t�H�[�N���ԓ��V���[�h�ł͐���ɋ@�\���Ă��Ȃ����Ƃ�������܂����B
������{�I�����ł����������Ă��܂����B
���܂̂Ƃ��뉽���������킩��܂���B
�ȑO�t�H�[�N���pNS-5000�����܂������A�h�C�c���ԓ��V�p�Ƃ��Ďq�ߐ��ŁA���A���ɕ����āA���]������z�肵�č���Ă���v���O�����̒��ɏC���������܂������A���x�́A����ɕς��āA�q�ߐ����P�Q�����炵�āi�܂�q�ߐ��ʒu���P�W�O°���̐^���ɂ���Ɖ��肵�āj�A
�������ɖ]�����̈ʒu�A������̓V�̈ʒu�̎��p���v�Z���A���ꂩ��]�����R���g���[�����v�Z����悤�ɕύX���܂����B
���̌��ʃv���O�������V���v���ɂȂ����Ǝv���Ă��܂����B
�t�H�[�N�����[�h������ɂ�����A�قƂ�Ljȏ�̖]�����R���g���[���������������������ŁA
�P�����ǔ��Ɋւ��ĉ������Ă��Ȃ�����ł����A�����ԈႦ���悤�Ɏv���܂��B
���������o�[�W�����A�b�v���Ă������������q�l�ɂ͑�������f�����������܂��Đ\����܂���B
�t�H�[�N���ԓ��V���[�h�̂����p�͍T���Ă��������܂��悤���肢���܂��B
�ʏ���ԓ��V���[�h�ɂ͖�肠��܂���̂ŁA���̂܂܂����p���������B
��������܂ŁA���炭�o�[�W�����A�b�v�͒��~���܂��B
���܂�܂����炨�m�点���܂��B
�������������������Ă��܂����B(PM11:17)
�s��̏Ǐ�́A�u��������A���X�ɐԌo�l�������Ă��܂��ǏłĂ��܂��B�v�̂ł͂Ȃ��A���X�Ɍ����Ă��܂����B
�t�H�[�N���ԓ��V���[�h�ɂ���ƁA���}�A�v���̒��ł́A�]�����̈ʒu�͂�����萼���ɓ����Ă����܂����B
�������A���[�^�͐���ɉ�]���P�����ǔ�����Ă���悤�Ɍ����܂��̂ŁA�����炭�]�����ʒu�͕ω����Ă��Ȃ��Ǝv���܂��B
�A�v����NS-5000�̏�Ԃׂ��Ƃ���A�t�H�[�N���ԓ��V���[�h�ɐ�ւ���ƁA���̂��H�n���P�������~�܂�܂����B
NS-5000�́A���ʂ̎��v�i�W�����v�j�ƍP�������v�̂Q��������Ă��܂��B
�n���P�����������Ȃ��Ȃ�Ƃ������Ƃ́A�P�������v������ɋ@�\���Ă��Ȃ����Ƃ������Ă��܂��B
�P�������v������ɓ����Ȃ���ANS-5000�͓����^���̉e���������ł��܂���B
�ȏ�̎��́A���x�̕s����悭�������Ă���Ǝv���܂��B
�����o�O�͈̔͂����ڂ邱�Ƃ��ł��܂����B
(2014,10/5)
���V����NS-5000CPU�{�[�h���������ł��B
�}�C�N���X�e�b�v�h���C�oIC���������Ȃ���Ȃ�Ȃ��̂ŁA�V�K��CPU�{�[�h�����܂��B
���Ԃ��o���Ă��܂��̂ŁA��v���}���ł��܂��B
CPU�{�[�h�̎d�l�͈ȉ��̂Ƃ���ł����APC�Ƃ̃C���^�[�t�F�[�X�́ARS232C��USB�A�ǂ���ɂ���ׂ������܂��ɖ����Ă��܂��B
USB�͋Z�p�I�ɓ���͂���܂��A�݊������ێ��������̂ŁARS232C������Ǝv���܂��B
�����P�`�����l����bluetooth�ł��B
���݁A�n�[�h�E�G�A�̊g�������قƂ�ǖ����̂ŁAI2C�Ƃ����C���^�[�t�F�[�X�����܂��B
����ɂ��o�X�ɕ����̃��W���[����ڑ����邱�Ƃ��\�ɂȂ�܂��B
��肭I2C��NS-5000�̃V�X�e���ɑg�ݍ��ނ��Ƃ��ł���A�����A���낢��Ɩ𗧂��낤�Ǝv���܂��B
����́A��{�I�ȃ��W���[�����I�v�V�����ŗp�ӂ������Ǝv���܂��B
�V����CPU�{�[�h���������܂�����A�o�[�W�����A�b�v�����ē�����\��ł��B
|
|
��NS5000_�i�r�Q�[�^�@�A�v�������J���Ă��܂��̂ł����p���������B
�ǔ����x�Ƃ��āA�P�����A�L���O�X���[�g�A�����x�A���z���x���{�^���ŊȒP�ؑւ��ł��܂��B
�_�E�����[�h
�����XNS-5000
Ver6.27�o�[�W�����A�b�v�̂��˗������Ă��܂��B
���]�����������Ȃ��t�H�[�N���ԓ��V���[�h�́A�ȊO�ɂ���]������悤�ł��B
|
|
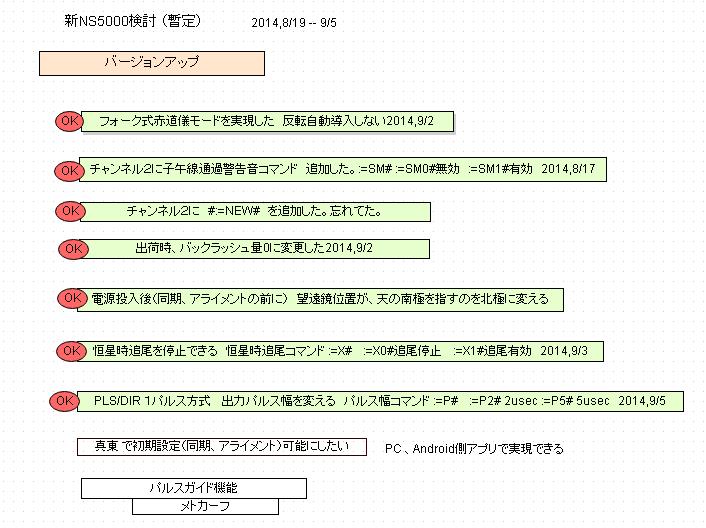
(2014,9/5)
��NS-5000
Ver6.27���قڊ������܂����B
�V�������[�h�ƂQ�C�R���ǂ�������Ver6.27�i�b��j���J�����܂����B
|
|
��ȋ@�\�Ƃ��āA�t�H�[�N���ԓ��V���[�h���������܂����B
#:&XSYS#�@
0:�ԓ��V���[�h�@�@1:�o�ܑ䃂�[�h
2:�t�H�[�N���ԓ��V���[�h
:&XSYS0#
�ԓ��V���[�h�ɂ���
:&XSYS1#
�o�ܑ䃂�[�h�ɂ���
:&XSYS2#
�t�H�[�N���ԓ��V���[�h�ɂ���
�ȑO���삵���`���U�O�����t�H�[�N���ԓ��V�pNS-5000FORK�ł����A���̌�s�������ƘA��������܂����B
���삩��A���܂ł����Ԏ��Ԃ������Ă��܂����̂ŁA�v���O�����ƃo�O�ɂ��Ē��ׂ�����A
�V�K�ɍ��Ȃ��������������m�����Ǝv���A�o�[�W�����A�b�v�Ńt�H�[�N���ԓ��V���[�h��g���݂܂����B
�h�C�c���ԓ��V�ł̓��X�N������܂����A��������m�̏�Ȃ�A���]�����������Ȃ��t�H�[�N�����[�h�͕֗���������܂���B
���X�A���q�l���炲��]���͂��܂��B������Q�l�ɂ��ď����R�}���h�A�p�����[�^�������ǂ��܂����B
�P�����ǔ����~�߂邱�Ƃ��ł���悤�ɂ��܂����B
���̕��@�ł��P�����^�]���~�߂邱�Ƃ͉\�ł������A�����́A���̃R�}���h�������p���������B
���ꂩ��A�ǔ���~����NEW�R�}���h�𑗂�ƁA����A�d�������Ȃ����Ă��P�����ǔ����܂���̂ŁA�����Ȃ��ł��������B
�ǔ����ĊJ����ꍇ�́@#:=X1#
��NS-5000�֑��M���Ă��������B
���q�l�̂���]�ŁANS-5000PKP243A1�ɂP�p���X�����@PLS/DIR�M���o�͂�g�ݍ����Ƃ�����܂��B(2014,6/17)
����͎�ɂT�����[�^�h���C�o�쓮��ړI�ɂ��Ă��܂����A����������I�v�V�����őΉ�����\��ł��B
����ɔ����ďo�̓p���X�����w��ł���R�}���h�����܂����B
2usec���W���ŃI���G���^���̃��[�^�h���C�o�ɑΉ����Ă��܂��B�ʏ�A���q�l���ύX����K�v���͂���܂���B
���̃��[�J�A�ᑬ�h���C�o���g���ꍇ�ɖ𗧂\��������܂��B
���ꂩ��A�p���X�K�C�h�̂���]������܂������A����͌�����ɂ��邱�Ƃɂ��܂��B
���̋@�\�́A�I�[�g�K�C�h�̑��ɁA���g�J�[�t�A���̑��ʼn��p�ł������ȋC�����Ă��܂��B
Ver6.27�́A�����Ńo�[�W�����A�b�v�������܂��B
����]�̂��q�l�͂��A�����������B��Ƃ͂P���ł��B���������ƂȂ�܂��B
(2014,8/18)
��NS-5000PKP264A2NJP
�Q�Z�b�g�o�ׂ��܂����B(2014,8/14)
NJP,EM200���[�^���j�b�g�̐���ł́A��ς��S�z�����������Ă���܂����A�Q�Z�b�gNJP���[�^���j�b�g���������܂����̂ŁA���҂��̂��q�l�ւ��ē����܂����B
����́A�ԓ��V�Ƀ��[�^���j�b�g����t���Ē��ڂ��q�l�֎�n�����܂��̂ŁA�H��֔������܂����B
���̑��ɂ��҂��̂��q�l�������܂����A������A���炽�߂Ă��ē��������܂��̂ł�낵�����肢���܂��B
|
|
|
���X�J�C�}�b�N�X�pNS-5000PKP264A2�̂��q�l����ʐ^���͂��Ă��܂��B(2014,7/23)
|
|
|
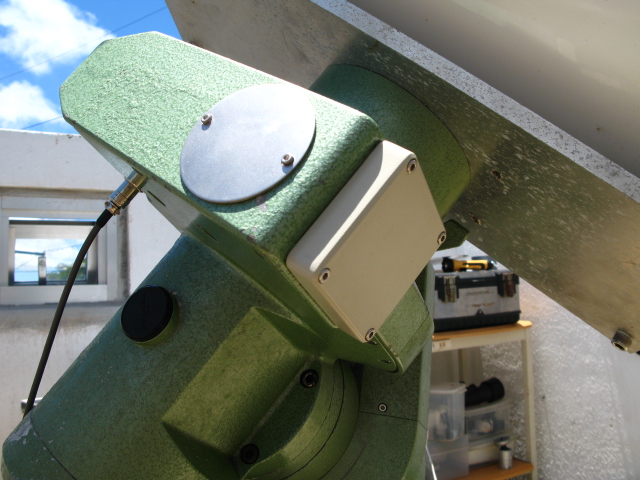
(2014,7/14)
���x���g�h���C�u�����̃��[�^���J�����Ă��܂��B
�V�����x���g�h���C�u�����ɂ�郂�[�^���j�b�g���i����ڎw���Ă��܂��B
�܂��ڏ��͗����Ă��܂��A����ƃf�[�^��A�C�f�A���W�܂��Ă��܂��B���݂́A�e�X�g�A�]���A���ǂ�i�߂Ă��܂��B
�ʐ^�͎���@�ł��BNJP���[�^���j�b�g�̃x�[�X�𗘗p���Ă���Ƃ���͍H�v�ɂȂ肻���ł��B
|
|
|
(2014,7/13)
��MS-5�pNS-5000MS5�̂��q�l���烁�[�������������܂����B
�����������������Ă��玞�Ԃ�������܂������A���q�l���烁�[�����͂��āA����ł��ׂĊ��������Ǝv���܂��B
����MS-5�ԓ��V�́A���Ȃ�[���ȏ�Ԃł����B
�@�u�@�Ԉ܃N�����v���ɂ߂Ă��Ԉ������Ȃ��B
�@�A�Ԍo�N�����v���ɂ߂Ă��Ԍo���͐����d���B
�@�B�W���̃��[�^�[����O���ăE�H�[���M�A�̉��������Ǝ�ʼnȂ����炢�d��
�@�@�@�E�H�[���M�A���j�b�g�P�i�ł������d���B
�@�C�Ԉ����ڍׂɒ��ׂ��Ƃ���x�A�����O�̌����������͖���Ǝv���錙�Ȉ��������肪
�@�@�@����O���[�X�̏�Ԃ��ǂ��Ȃ��Ɛ��@�ł���B
�@�D�h�����e���Ŕ�����Ă���i���Q�Ǝv���܂��j
�v
���̏�Ԃł̓��[�^�������Ă�NS-5000�̔\�͂������o���͓̂���ƍl���A�悸�ԓ��V���I�[�o�[�z�[�����Ă��烂�[�^�������邱�Ƃɂ��܂����B
��Ƃ́A�D�y�s�̃A�X�g���V���b�vAu�l�ɂ��肢���܂����B
��ƏI����e�X�g���s���܂������A��L�̖��͉������A�ǍD�ȏ�Ԃɕ������܂����B
|
|
|
|
|
|
�I�[�o�[�z�[���APKP264A2���[�^������A�ȉ����`�F�b�N���܂����B
�P�@�Ԉܑ͕̂���������ԂŃ��[�^�`�F�b�N���܂����B
�Q�@�ŏI�m�F�Ƃ��Ď��ۂɐԓ��V���ˑ�ɍڂ��A�]���������ڂ��āANS-5000MS5���������A�ǔ��e�X�g�����{���܂����B
(2014,6/26
�A�X�g���V���b�vAu�l���)
�u�ō����@42�Ԃŏ[������m�F�ł��܂���
���q�l�ւ́@40�Ԃ̐ݒ�ł����肵�悤�Ǝv���Ă���܂��B
�����@�ǂ����ǔ��������������ȁH�@�Ƃ����v�������Ă��܂��B
�ʐ^�́@�œ_�@1200�����@�@1�s�N�Z���T�D�Uμ
�̃`�b�v�Ł@�P�O���łR�s�N�Z���قǒǔ��������̂ł����H
�o�b�N�A�c�v�f�[�^�[�������肢�����܂��B
�v
�S�Q�ԂS�O�O�{���A�S�O�Ԃ͖�R�U�O�{���ł��B
���ʂ���P�����ǔ���菭���x���L���O�X���[�g�֕ύX���Ă���A���q�l�i���ꌧ�j�֔������܂����B
MS-5
�P����93.588
pps�@-->�@�L���O�X���[�g93.549
pps
�����q�l���烁�[�����͂��܂����B
(2014,6/26)
�u�����A�䕗�W���ڋ߂ő�r��̉���ł��B
�ڋ߂S���O�ɒǔ��e�X�g�s���܂����A�쒆�O�̓y����f����p�J�����iPC�J�����j�Œǔ�
����i640��480�@�T�{�o���[�g�p�@F30�j��������R�O���Ԉړ����邱�Ƃ��Ȃ������Ȓǔ����x�ł����B
�y�����ᎋ�Ŋm�F�������A�����U�����C�ɂȂ�܂������A�J�����g�_�E�������{�����[���i���
�U���͎��܂胂�[�^�[�����������܂���B���̎��̘f���\�ʂɃr�b�N�����܂����A�䕗�ڋߑO�ł���
�V�[�C���O�͍ŗǂł͂���܂���B�y���̎Ȗ͗l�A�k�ɕt�ߊm�F�ł��܂����B
���������œy������A���^���X�̔���Or6mm�Ŋm�F�i�ȑO�̃p���X���[
�^�[����ł͐U��������ᎋ
�ł͂ނÂ����������ł��j�ǔ��A���������͖����ł��B
���肪�Ƃ��������܂����B
�v
�J�����g�_�E�������{�����[���ł����A����̓��[�^�U�������炷���߂ɍl�Ă��܂����B
�{�����[���ōP�����ɂ����郂�[�^�o�̓g���N���ł��܂��B
�{�����[���̓��[�^�쓮�d�����ς��A�ԐړI�Ƀ��[�^�o�̓g���N�̂V�O�`�O���܂ʼnς��邱�Ƃ��ł��܂��B
�{�����[���Ńg���N�����S�ɂO�ɂł��܂��B
�g���N�������Ă䂭�ƁA����ɉ����ă��[�^�쓮�����Â��ɂȂ�܂��B���̕ω��͗ǂ�������܂��B
�}�C�N���X�e�b�v�쓮�ł����Ă��A���g���N�̏�ԂŐԌo���[�^�������A�K�v�ŏ����̃g���N�ōP�����ǔ����������U�������Ȃ��Ȃ�܂��B
�{�����[�����i��ƁA���܂��Ƀg���N���s�����čP�����ǔ����~�܂�܂��̂ŁA���̒��O�i�ŏ��g���N�j�ɍ��킹�܂��B
���̏�ԂŃ}�C�N���X�e�b�v�쓮����̂��A��U�����ɂ����āA�ł����ʓI�ȕ��@���ƍl���Ă��܂��B
�J�����g�_�E�������{�����[����NS-5000�̗B��̃A�i���O�����̃{�����[���ł��B
����͂��q�l�̐ԓ��V�A���[�^�A�]�����A�O�C���E�E�Ȃǂɂ���ԁi�g���N�j���ω����܂��̂ŁA�{�����[���ɂ��܂����B
����MS-5�ԓ��V�̎ʐ^���͂��܂����B
(2014,7/13)
�u�����@�l
�������������̋�������ł��B
���̃V�X�e���ł��A���[�^�[���t�������͎v�������O�ɔ�яo�����Ƃ��Ȃ�MS5�ԓ��V�ƃx�X�g�}�b�`�ł��B
�ǔ��A���������A�Ïl���\�A�f���ϑ��h�ɂ͐U���̂Ȃ�NS5000�̃R���g���[���͂��炵���ł��B
����̓y���摜�ł��B�v�@
|
|
|
|
|
(2014,7/6)
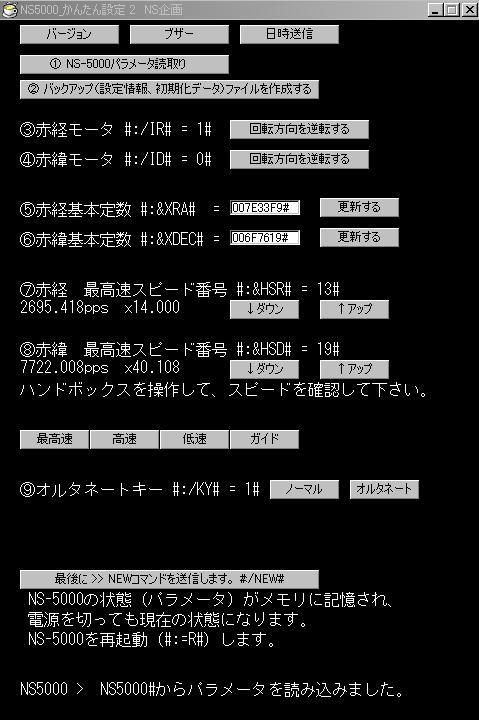
��NS5000_����ݒ�2A
�A�v�������܂����B
�V�������[�e�B���e�B�A�v���ł��BCOM�ԍ�
�̐�����܂���BRS232C�ABluetooth�i�u���[�g�D�[�X�j�ǂ���ɂ��Ή����܂��B
DOG_BACKUP3
�ADOG_TERMINAL
�̋@�\���܂�ł��܂��B
���߂�DOG�������p�����������A�V�����ԓ��V�ɐؑւ����ꍇ�ɁA���̃A�v���Ŋ�{�I�ȃp�����[�^��ݒ肷�邱�Ƃ��ł��܂��B
���Ђ����p�������BNS5000_����ݒ�2A�@���C�Â��̓_������܂�����A���m�点�������B
|
|
���X�J�C�}�b�N�X�pNS-5000PKP264A2�̂��q�l���烁�[�����͂��Ă��܂��B
���Ȃ����������ł��Ă��邻���ł��B���S���܂����B
(2014,6/26)
�u����͉_������f���ϑ��͖����ł������ANS-5000�̎����������e�X�g���Ă݂܂����B
�u�Ԉ܃��[�^�[�̉�]�������t�]���āv����Ɏ����������ł��܂����B
���̋�ŁA�x�K�|�|�����X�A���n�Q�|�|���A���^�C��
���̋�́@�A�[�N�g�D���X�|�|���y���|�|���v���P���}�|�|��M13
���̋�́@M57�@�Ɩ��Ȃ������ł��܂����B
�v
��NS-501GP
�Q�䔭�����܂����B(2014,7/2)
|
|
(2014,6/25)
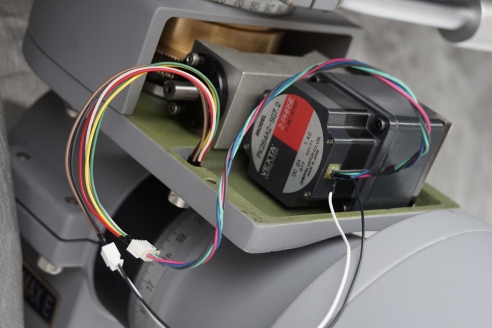
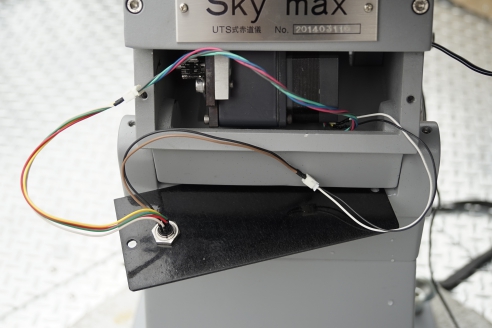
���X�J�C�}�b�N�X�pNS-5000PKP264A2�ł����A���q�l�����p�R�l�N�^�QP����t�����܂����B
�X�J�C�}�b�N�X�iE-ZEUS�d�l�j�p��NS-5000�̂��߂ɁA���q�l�ɒ��p�R�l�N�^2P�̃n���_�t�������肢���܂����B
�ʐ^���͂��܂����B�ƂĂ����ɔz������Ă��܂��B
|
|
|
|
(2014,6/24)
��NS-5000�R�䔭�����܂����B
|
|
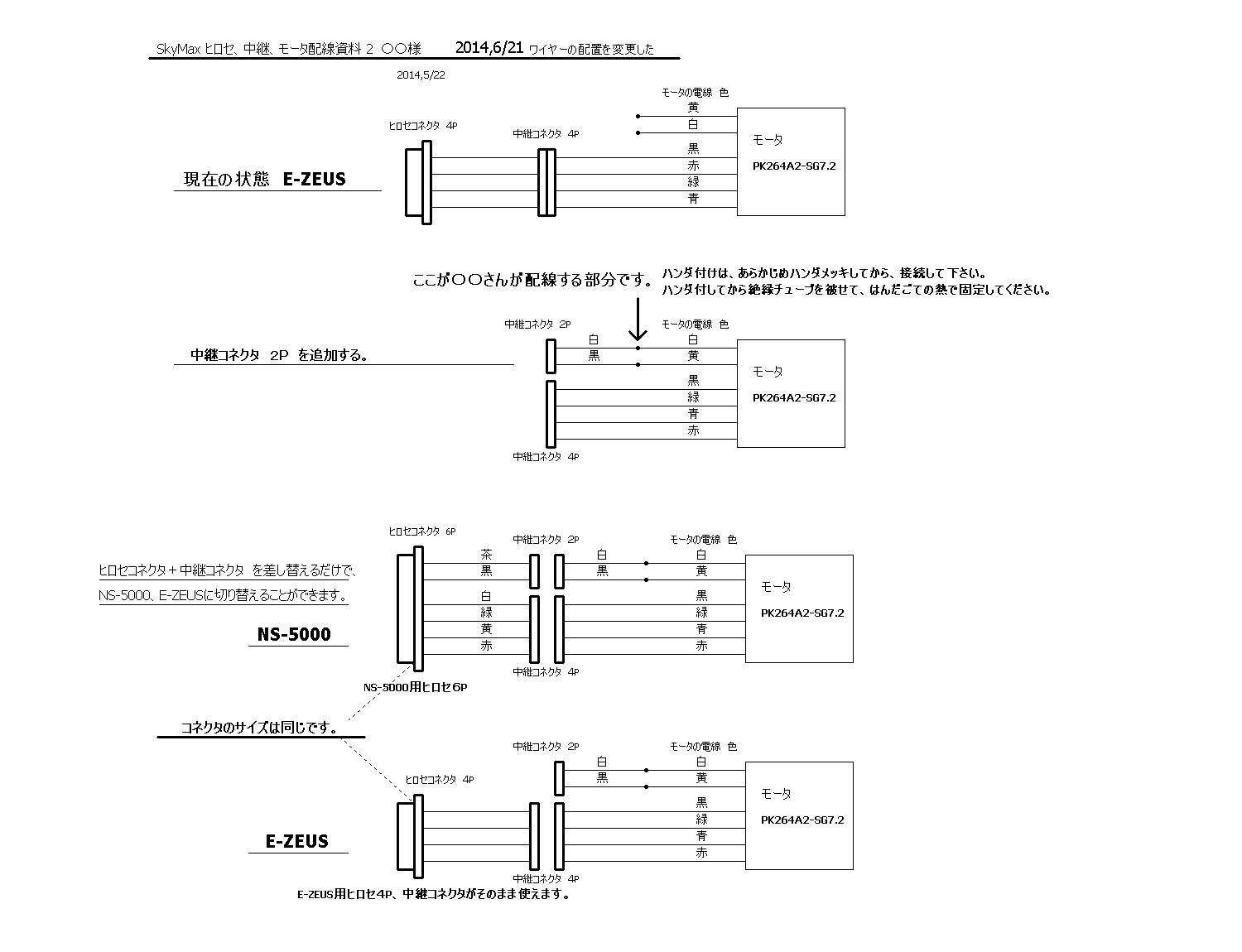
���X�J�C�}�b�N�X�pNS-5000PKP264A2�ɂ���
�X�J�C�}�b�N�X�iE-ZEUS�d�l�j�p��NS-5000�ɂ��Ă��₢���������������܂����B(2014,5/16)
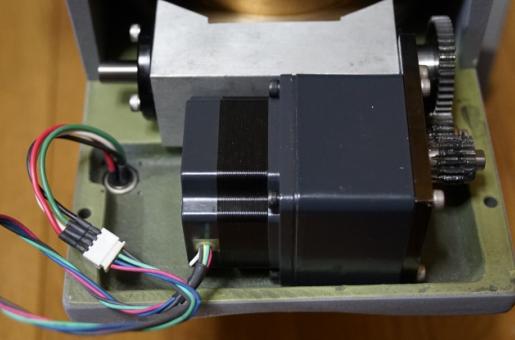
�X�J�C�}�b�N�X�̃��[�^��PK264A2
SG7.2
�ŁA�����NS-5000PKP264A2�ŋ쓮���邱�Ƃ��ł��܂��B
�X�J�}�b�N�X��NS-5000�œ����������Ƃ�����܂��B
http://blogs.yahoo.co.jp/kushit/26891564.html
���q�l����A�o�����NS-5000��E-ZEUS�ǂ�������p�ł��Ȃ����낤���Ƃ̂���]������܂����B
�����ŁA����̃��[�^�A�ڑ��R�l�N�^���̔z���ׂ܂����B
���[�^�P�[�u���̔z������i�S�{���j�AE-ZEUS�̓X�e�b�s���O���[�^���o�C�|�[���쓮�œ������Ă��邱�Ƃ�������܂����B
����ɑ���NS-5000�̓��j�|�[���쓮���̗p���Ă��܂��B
�쓮�����ɂ��A��ʓI�Ɉȉ��̓���������܂��B
�o�C�|�[���쓮�@�@��r�I�ᑬ��̃g���N���傫���A�����g���N�Ȃ�A���j�|�[��������d�͂����Ȃ��Ȃ����������܂��B
���j�|�[���쓮�@�@�ᑬ��̃g���N�̓o�C�|�[����菭�Ȃ��ł����A������̃g���N�̓o�C�|�[�������D��Ă��܂��B
�ǂ��������������܂����A���j�|�[���쓮�ő�^�ԓ��V���쓮���邱�Ƃ��ł��܂��̂Ŗ�肠��܂���B
|
|
|
|
|
|
|
|
|
|
���d���X�C�b�`�Ƃ��āA�v�b�V���X�C�b�`���g�����Ƃ��ł��܂��B
���ʂ̓g�O���X�C�b�`���g���܂����A���q�l�̂���]�Ńv�b�V���X�C�b�`��t���Ă݂܂����B
����]������I�v�V�����őΉ����܂��B
|
|
|
(2014,6/17)
��NS-5000U150�ANS-5000PKP243A1�i�T�����[�^�Ή��j���قڊ������܂����B�߂���������\��ł��B
NS-5000U150
>
NS-5000U150 �i���[�n���H�Ɨl�j
>
�I�v�V����
>
�E�n���h�{�b�N�X
>
�E�I�[�g�K�C�_�[���͒[�q
>
�E�}�C�N���X�e�b�v��ւ��X�C�b�`
>
�E�J�����g�_�E�������{�����[��
>
�E�u�U�[�w�ʂɎ�t�����H�i�u�U�[�����傫���Ȃ�܂��j
>
�EBluetooth�i�u���[�g�D�[�X�j�i�{�̂ɓ����j
>
�EBluetooth�h���O���i�p�\�R���p�j
>
>
���[�n���H��
U-150�ԓ��V
1/16�����}�C�N���X�e�b�v
>
�E�I�[���z�C��
288
>
�`�B�M�A��
1:1
>
�Ԍo�A�Ԉ܃��[�^
PKP243U09A-SG18-L
(�����M�A��
18:1)
NS-5000PKP243A1�i�T�����[�^�Ή��@�����s�j
�P�@DOG
NS-5000PKP243A1
Ver5.26
�@�@���[�^��PK/PKP243�@A1�p�ł��B
�@�@���[�^�ڑ��P�[�u���iDIN8p,NJP,GP�p�j�A�d���P�[�u���t�����܂��B
�Q
NS-200/500/5000�p�n���h�{�b�N�X
�R
�I�[�g�K�C�_�[���͒[�q LX200�݊����W�����[�W���b�N
�S
�}�C�N���X�e�b�v�ؑփX�C�b�`
�{�̂ɓ������܂��B�}�C�N���X�e�b�v��������؊����ł��܂��B
��U�����Ɍ��ʂ�����܂��B
�T
�Ԍo�J�����g�_�E�������{�����[��
��U�����Ɍ��ʂ�����܂��B
�U
Bluetooth�i�u���[�g�D�[�X�j
�{�̂ɓ������܂��BAndroid�^�u���b�g�A�X�}�[�g�t�H���A�p�\�R�����疳���Ŏ��������ł��܂��B
7�@Bluetooth�h���O���@�i�p�\�R���p�j
8�@�d���@�Q�S�u---->�R�U�u�d���d�l�ɉ���
9�@�P�p���X�����@PLS/DIR�M���i�I�[�v���R���N�^�o�́j�@��DIN�R�l�N�^�ɏo�͂��܂��B
�@�@���݃R�l�N�^�̓~�jDIN�P�T���ɂ��܂����B�i�I�X�j
�@�@�[�i�����M���z�u�}����܂��B�I���G���^���T�����[�^�Ɛڑ��ł��܂��B�i�������܂���j
�@�@�T�����[�^�Ɛڑ�����ꍇ�́A�d���R�UV�ł��\�ł����A�P�QV�̕������S�����Ȃ����肷��Ǝv���܂��̂ł����߂��܂��B
�@�@�T�C�g�ɎQ�l����������܂��B�ڑ��R�l�N�^�����t�����܂��B
10�@DC5V
0.3A
�̓d���o�͂��@����DIN�R�l�N�^�ɐڑ����܂��B0.3A�ȉ��A�y�����ׂł����p���������B
�@�@���ׂ��d���Ɠ��삪�s����ɂȂ�\��������܂��B
 ������NS-5000PKP243A1�i�T�����[�^�Ή��@�����s�j�A NS-5000U150 �i���[�n���H�Ɨl�j |
(2014,6/15)
��NS-5000PKP264A2NJP�ANS-5000EM200HB�ANS-5000NewATLUX�́A�\�������܂��A�ꎞ�𒆎~���܂��B
���˂�NJP�̐������x��Ă��܂������A�܂����P�Ɏ��Ԃ������錩���݂ł��B
�����ō��܂Ŏ�ɐ�����n�߂Ă����̂��A���炩���߈�萔�ʂ����Ă��炨�q�l�ɂ��ē����邱�Ƃɂ��܂��B�i�\����t���܂��j
���q�l�ɂ͂��s�ւ����|�����܂����A���炭�𒆎~�����Ă��������܂��B
�܂��ANS-5000EM200HB�͏����������܂����炲�ē����ĊJ����\��ł��B
NS-5000NewATLUX�͂��炽�߂ă��[�^�����ɂ��Č����������Ǝv���Ă��܂��B
���ꂩ��NJP�ɂ��ẮA���ݐV�����̃��[�^���j�b�g���J�����ł��B
���i���̖ڏ��������܂�����T�C�g�ł��Љ�܂��B
�������́A�ȉ���NS-5000�삵�Ă��܂��B
1,2�͎Q�l�ɂȂ�܂��̂Œǂ��Ă��������܂��B
1�@NS-5000PKP243A1�ɂT�����[�^�i�P�p���X�����j�̃C���^�[�t�F�[�X��������܂��B���쒆�ł��B
�@�@�Q�����[�^�ƂT�����[�^�̂ǂ�����쓮�ł��܂��B���ʎd�l�B
2
E-ZEUS�Ɛ�ւ����\�ȃX�J�C�}�b�N�X�pNS-5000�B���쒆�ł��B
3
NS-5000U150�B���쒆�ł��B�i���[�n���H�Ɨl�j
�@�����m�̕��������Ǝv���܂����AU-150�ԓ��V������I���ƂȂ�܂����B
�@���ɒǔ����x���D�ꂽ�A�Ƒn�I�Ȑԓ��V���Ǝv���Ă��܂����B�c�O�ł��B
�@�������Ԃ��o���Ă��܂����A���[�n���H�Ɨl����̃��[���ł�5��21��
�̎��_�łQ��̍ɂ������������ł��B
�@�P��͐��܂����B���ꂩ��m�F���Ă��܂��A�������ɂ��c���Ă���\�������邩���m��܂���H
4
NS-501GP�Q��삵�܂����B�i�Q��A�X�^�[�x�[�X���É��X�l�j
�@�@(2014,6/10)�[�i�͊����������܂����B���É��X�l�ł����戵�������Ă��܂��B
5
NS-501GP+
MT-1�@(���쌧�@2014,6/4)
6
NS-501GP�P��A�̌����݂ł��B(2014,6/15)
(2014,6/14)
��10�C���`�@�A���h���C�h�^�u���b�g���܂����B
�A���h���C�h�Ƃ���NEXUS7�������Ă��܂����A���������傫�ȃ^�u���b�g���~�����Ǝv���Ă��܂����B
�����ł����钆�^�u���b�g�ł����Aamazon����v�����āA
�uAndroid
�^�u���b�g
�y�N�A�b�h�R�A Bluetooth
16GB�Łz
�A���h���C�h4.4
10�^
�Ód���^�b�`�p�l���v���܂����B
���ʂ͂����������ł����B��ʂ͂P�O�C���`�Abluetooth�����ł���Ȃ���A���i�͖�P�D�Q���A�����ɓ����Ă��܂��B
�掿��NEXUS7�Ɣ�ׂ�ƌ���肵�܂��A���₷������p�͐�������Ă��܂��B���������ɂ͉������Ȃ����x���ł��B
�u���E�W���O�̓T�N�T�N�AYouTube�̓���́A�������Ȃ߂炩�ɍĐ����Ă���܂��B
SkySafari
Plus
��NS-5000�Ɛڑ����A���������������܂������A��肠��܂���ł����B
|
|
|
|
��NS-5000�p�̕��i���w�����܂����B
|
|
|
|
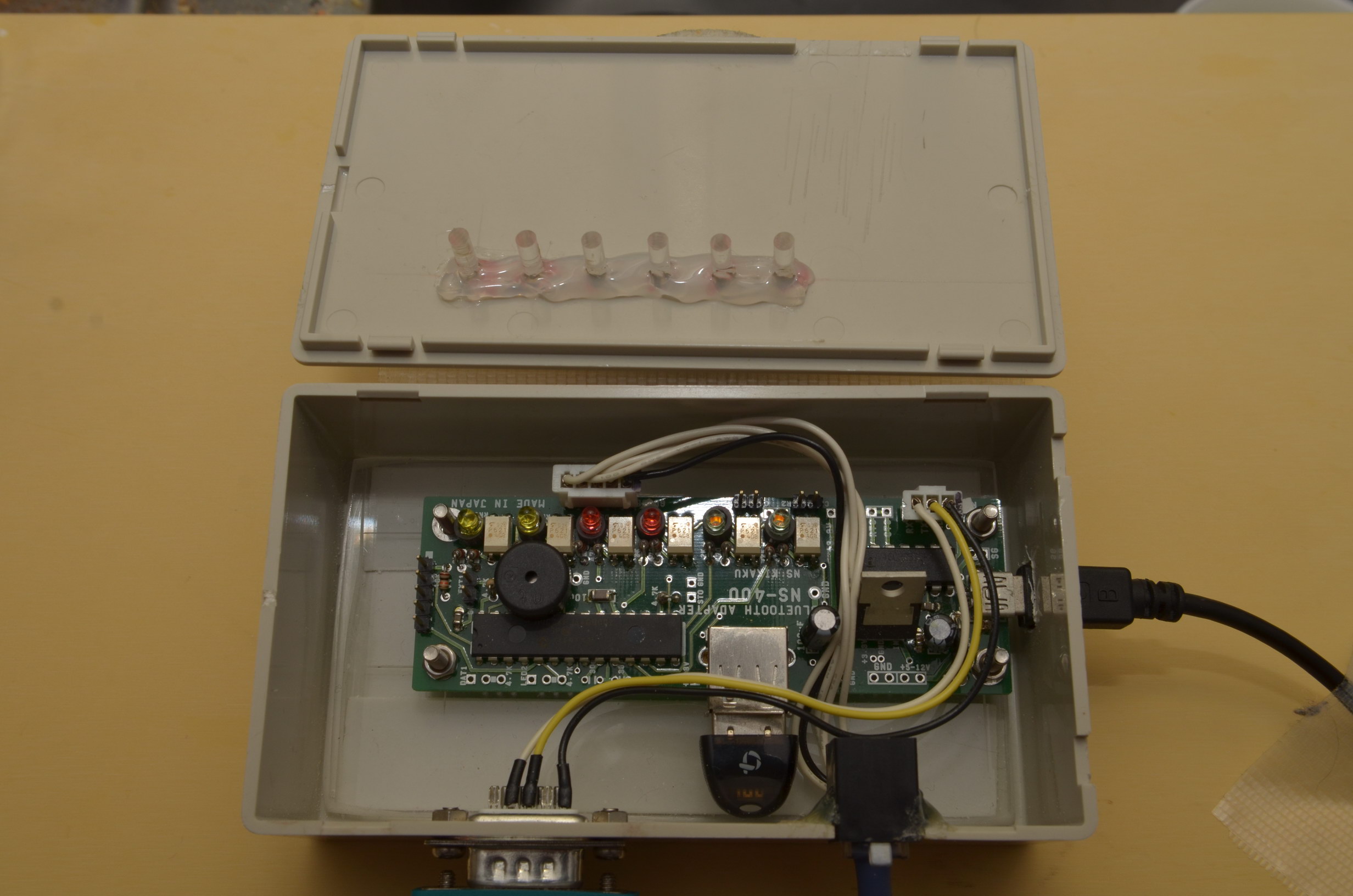
(2014,4/27)
��NS-400����ݒ��@�A�v�������܂����B
Bleutooth�A�_�v�^NS-400�̓���m�F���ł��܂��B
�����ʐ^�A��H�}�A
�R�}���h�ꗗ�\�������Ă��܂��B�����p���������B
NS-400�̓P�[�X����萻�i������\��ł������A�P�[�X���H�����\�ʓ|�Ȃ̂Œ���Ă��܂��B
������NS-400��NS-5000���̑��̋@��őg���ݗp�Ƃ��ė��p���Ă��܂��B
���q�l���玩���NS-400�̎ʐ^�𑗂��Ă��������܂����B
�ƂĂ����ɑg�ݍ��܂�Ă��܂��B
|
|
|
|
(2014,4/22)
��NJP���[�^���j�b�g���Q�Z�b�g�o���オ��܂����B
��N����̎c�Ƃ��āANS-5000PKP264A2NJP�ANS-5000MS5�ANS-5000NewATLUX������܂��B
�Ƃ���NJP�̂������������Đ���Ɏ��Ԃ��|�����Ă��܂����B���̂��߂̑��i�߂Ă��܂��B
��Ԃ̂����郂�[�^�J�o�[�́A������u�A���~��CNC���o���A���}�C�g���H
�v�ɕύX����\��ł��B
NS-5000MS5�ł����AMS-5�ԓ��V�̃��[�^�����iPKP264A2NJP�j�𑼂̍H��őΉ�����悤�ɂ��܂����B
����������ώ��Ԃ��|�����Ă��܂������A�ߓ����Ɋ�������\��ł��B
����́AMS-4�ԓ��V��MS-5�Ɠ��l�ɑΉ��������܂��B
|
|
(2014,4/16)
��NS5000_BACKUP4A�����܂����B
DOG_BACKUP3.tcl���Q�l�ɂ��Ȃ���ADOG_TERMINAL2A���g�����ĊJ�����܂����B
TERMINAL2A�̋@�\�͂��̂܂܂ɂ��Ă��܂��B�����p���������B
NS5000_BACKUP4B.lzh
(2014,4/28�X�V)
�u�f�[�^�ǎ���v�{�^���������Ă���A�u�������f�[�^File���쐬�����v�{�^���������ƁA
�����I��NS5000_BACKUP4A�z���_�ɏ������f�[�^�t�@�C���irenew**�j�A�ݒ���t�@�C������������܂��B
�t�@�C���͕ʂ̃z���_�ɕۑ����Ă��������B�㏑������鋰�ꂪ����܂��B
���������A�ꕔ���i���i��ύX�����Ē����܂��B
����ł��W���ƂȂ�A�S�������ĂɃp�[�c�̍w���P�����㏸���Ă��܂��B
�܂��A�ꕔ�i���[�^���j�b�g���j�̐��i�R�X�g�����߂ɔ�㏸���Ă�����̂�����܂��̂ŁA
���i�������������Ē����܂��̂ł�낵�����肢���܂��B
���ꂩ�琻�i�A�I�v�V�����̓��e�ɂ��Č�������\��ł��B
�Ή�����������u�ԓ��V�ؑփX�C�b�`�v�͔p�~�����Ē����܂��B
���ɂ��Ȃ��Ȃ����̂�NS-5000CPU�{�[�h�����܂����B
�����NS-5000CPU�{�[�h�͐�p�̃}�C�N���X�e�b�v�h���C�oIC���p�~�i�Ɏw�肳�ꂽ�̂ŁA
�V�������IC�ō��Ȃ����Ȃ���Ȃ�Ȃ��̂ł����A���ԂƎ�Ԃ�������A�܂��܂���ɂȂ肻���ł��B
�d���Ȃ��̂ŁA������肪����Ȃ��Ă��Ă��܂����A�����h���C�oIC���m�ۂł��܂����B
����ɍ��킹��NS-5000CPU�{�[�h��lj��������܂����B
����Ŏb�����Ԃ��҂��܂��B
CPU�{�[�h�̐���ł����A���̑��ɂ���肽�����̂��F�X����̂ł����A
����܂Ŏg���Ă���pcbe�@��mbe(Minimal
Board
Editor�ANS-400�Ŏg���܂���)�ł́A��Ԃ������肷���āA���Y�����ǂ�����܂���ł����B
�����ŁA��ԂƎ��ԒZ�k�����҂��āAKiCad�������Ă��܂��B
����́A��H�}�G�f�B�^�APCB�v�A�����z���A���i�\�A�K�[�o�[�o�́A3D�\�����܂܂�Ă��鑍���I�ȃc�[���ł��B
���͕K�v�ȃt�b�g�v�����g�������Ȃ��琻��̏�����i�߂Ă���i�K�ł����A���ꂪ�o���オ��A���͂Ȏ�i�ɂȂ�Ǝv���܂��B
|
|
(2014,3/12)
��DOG_TERMINAL2A�������o�[�W�����A�b�v���܂����B
�u�������M�v�{�^����lj����܂����B�ȒP�ȋ@�\�ł������邱�Ƃ������܂��B
DOG_TERMINAL2A.lzh
�{�^�����N���b�N����ƁAPC�̎��v��ǂݏo���ANS-5000�̎��v�����������܂��B
����ƈȉ����ł���悤�ɂȂ�܂��B
�����A�n���P������������܂��B
�����ݒ�i�����A�A���C�����g�j���ł��܂��B
�����������ł��܂��B
NS-5000�͎��v�������������ƁA�����ɒn���P�������v�����������Ă��܂��B
�����ݒ�i�����A�A���C�����g�j�͎��̃R�}���h�Ŏ����ł��܂��B
��@�V���E�X�ŏ����ݒ�i�����A�A���C�����g�j.txt
#:=SD#
#:Sr
06:45.1#
#:Sd
-16*42#
#:CM#
Sr�@�Ԍo
Sd�@�Ԉ�
#:CM#�@�@�����ݒ�i�����A�A���C�����g�j�R�}���h�ł��B
#:=SD#�̓u�U�[��炵�܂��B�����Ă����܂��܂���B
���������͈ȉ��ł��B�������R�s�ł��B
��@M42��������������.txt
#:Sr
05:35.4#
#:Sd
-05*27#
#:MS#
#:MS#�@���������R�}���h�i���߁j�ł��B�Ԍo�A�Ԉ܂�����������A�l�X�ȓV�̂����������ł���悤�ɂȂ�܂��B
�܂��A�Ԍo�A�Ԉ܂������@#:MS#�@�����𑗐M�����ꍇ�́A�O�����������ʒu�������������܂��B
�����������Ɂ@#:Q#�@�𑗐M����ƁA�������������~����܂��B
�R�}���h�͈�s�ŁA�ȉ��̌`���ł�OK�ł��B�������A�����͕K�����p�p�����ɂ��Ă��������B
#:Sr
05:35.4##:Sd -05*27##:MS#
#:Sr 05:35.4#�@�@#:Sd
-05*27#�@�@#:MS#
:Sr
05:35.4#�@�@:Sd
-05*27#�@�@�@:MS#
�t�@�C���ɃR�}���h�̃T���v���������Ă��܂��B�ȒP�ł��B�Q�l�ɂ��Ă��������B
�v���O�����͎��R�ɉ����A�Ĕz�z�A���J���Ă��������Ă����܂��܂���B�����p���������B
(2014,3/9)
��DOG_TERMINAL2�̃v���O���������J���܂��B
���R�ɂ����p���������B
DOG_TERMINAL2_program.lzh
HSP����http://hsp.tv/
���ӌ��A����]�A���C�Â��̓_�Ȃǂ���܂����炨�m�点�������B
(2014,3/8)
���V�����@DOG_TERMINAL2�@�����܂����B
NS-5000�փR�}���h�A�������f�[�^�𑗐M����ꍇ�A����܂Ńn�C�p�[�^�[�~�i����[�e�B���e�B�\�t�g�ADOG_TERMINAL.tcl�Ȃǂ�
�����p�������Ă��܂������A�g�������ACOM�ԍ����P�`�S�܂ł̐���Ȃǂ�����A���܂�֗��ł͂���܂���ł����B
HSP����Ŏd���������̂ŁA�Y��Ȃ������ɁA���[�e�B���e�B�\�t�g�@
DOG_TERMINAL2�@�����܂����B
DOG_TERMINAL2.exe
�͈ȉ��̓���������܂��B
COM�ԍ��̐�����܂���BBluetooth��COM40�ł�OK�ł��B
���M���@�͂������ĊȒP�ł��B�ړI�̃R�}���h�A�������f�[�^�t�@�C�����h���b�O�A���h�h���b�v���邾����NS-5000�֑��M�ł��܂��B
NS-5000����̃A���T���킩��܂��B
���������H�v���ł������ł����A�֗��ł��̂Ō��J���܂��B
���Ɋ܂܂��@�Ԍo�H.txt
�Ԉ܊�{�萔�H.txt
�������Ƀh���b�O���ĉ������B
DOG_TERMINAL2.lzh
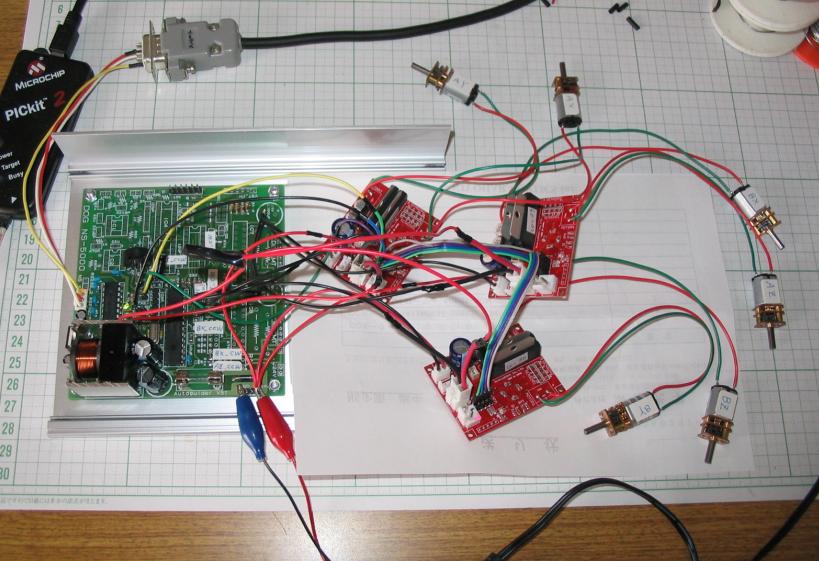
��DC���[�^�R���g���[���͊������܂����B
���j�ł����A���������̗\��ł��BPC���̃A�v���́AHSP�ō��܂����B
|
|
|
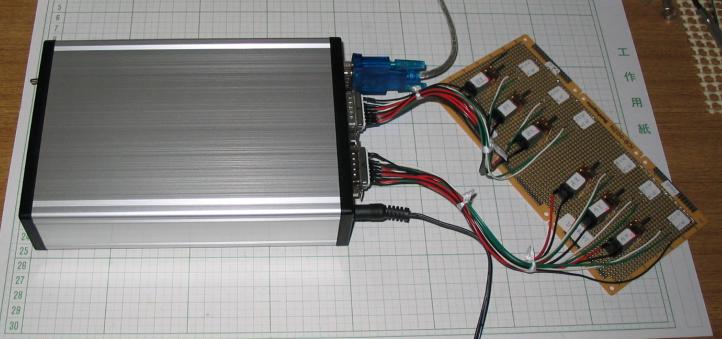
(2014,3/4)
��DC���[�^�ɂ�鑽���R���g���[���͂��������̂Ƃ���܂ŊJ�����i�݂܂����B
�d���̔[���͍����P�O���ł��B���肬��ǂ��l�߂��Ă��܂������A���A�悤�₭�v���O���~���O���قڊ��������̂ŁA
�}���Ŏʐ^�̂悤�ȏ�Ԃɑg�ݏグ�A�\�t�g�A�n�[�h�̃e�X�g���s���܂����B��肭�����Ă��܂��B���S���܂����B
���ꂪ�ł��Ă���A����PC���̃v���O���������܂��B
|
|
(2014,2/23)
���`���U�O�����p
NS-5000FORK
Ver6.27�͐���Ɏ����������ł��܂����B
�t�H�[�N���ԓ��V�Ƀ��[�^����t�����e�X�g���s���܂����B����ɂ��ă��[�����܂����B
2014�N2��11��
�u�@�P�����ǔ��E�E�E�E�E��肠��܂���ł����B
�@�A���������@�E�E�E�E�E�X�e���i�r�Q�[�^Ver.8�ɂČ��œ������Ƃ�ؐ��������
�@�@�@�@�@�@�@�@�@�@�@�@�@��薳������ɓ���܂����B�ؐ��ƌ����J��Ԃ�������������
�@�@�@�@�@�@�@�@�@�@�@�@�@�݂܂�������肠��܂���ł����B
�@�B���X�|���X�@�E�E�E�E�E����Box�Ń{�^���������Ă��王�삪�����܂ł̎��Ԃł���
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�^�C�����O�͖w�ǖ����o�b�N���b�V�����w�NJ����܂���ł����B
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�����A�X�s�[�h�ݒ�������ɂ����ꍇ�ɑ��x�̑��������x
�@�@�@�@�@�@�@�@�@�@�@�@�@�@���x���Ƃ̃R�����g���܂����̂Ŋ�{�ݒ�t�@�C���̑��x
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�X�e�b�v���Ԃ�i�K�I�ɉ����ŏI�I��512��10�ɐݒ肵�܂����B
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�W����NS-5000�ƈ���ăX�e�b�v���Ԃ�ς��Ă��ω����銄��
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�����܂芴���܂���ł����B���̃R�}���h�̋@�\�͐����Ă���
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�̂ł��傤���H
�@�Cbluetooth����E�E�E�E���̃X�}�z�Ń����N���m����Sky�@Safari�@Plus�ɂĎ���������
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�s�����Ȃ������m�F���܂����B
�v
�u���������ΑO��̂��œ������x��Y��Ă��܂����B
X800�Ƃ̎��ł��B�傫�ȋ������E������������������������e�p�͔��͂�����
�܂����B�����X���[�X�Ȋ����ł����B
�v
�����A�������x�i�p���X�j�̐ݒ���@�͕ύX���Ă��܂���B�m�F���Ă��܂��̂Ŗ��Ȃ��͂��ł��B
�U�O�����t�H�[�N���͔��ɑ�^�ŏd�ʂ�����܂��̂ŁA���߂ɉ����A���������Ȃ�X���[�ɐݒ肵�Ă����܂����B
800�{���̍����쓮�A���g���N�A��U���́A����AαSTEP�R���g���[���{�T�����[�^�̑g�ݍ��킹�Ŏ������܂����B
�`���U�O�����̎d���ŁA�Q���ɔ�ׂT�����[�^�̗L�������������܂����B
������αSTEP�͔��ɍ����Ȃ̂��c�O�ł����A���i���ł��Ȃ��������������Ǝv���܂��B
�U�O�����]�����ƃt�H�[�N���ԓ��V���A�d�C�I�Ȍ듮���v��ʑ���~�X�����邽�߂ɁA
����҂̐��l�Ɉȉ��̈��S��������߂��܂����B���̂��q�l�ɂ��Q�l�ɂȂ�܂��̂ł��Љ�܂��B
2014�N2��14��
�u�����b�ɂȂ�܂��B
�����������������������ň��S���܂����B
>�@�m�F���������ł���
>�@�@�P�����ǔ��E�E�E�E�E��肠��܂���ł����B
�������܂����B
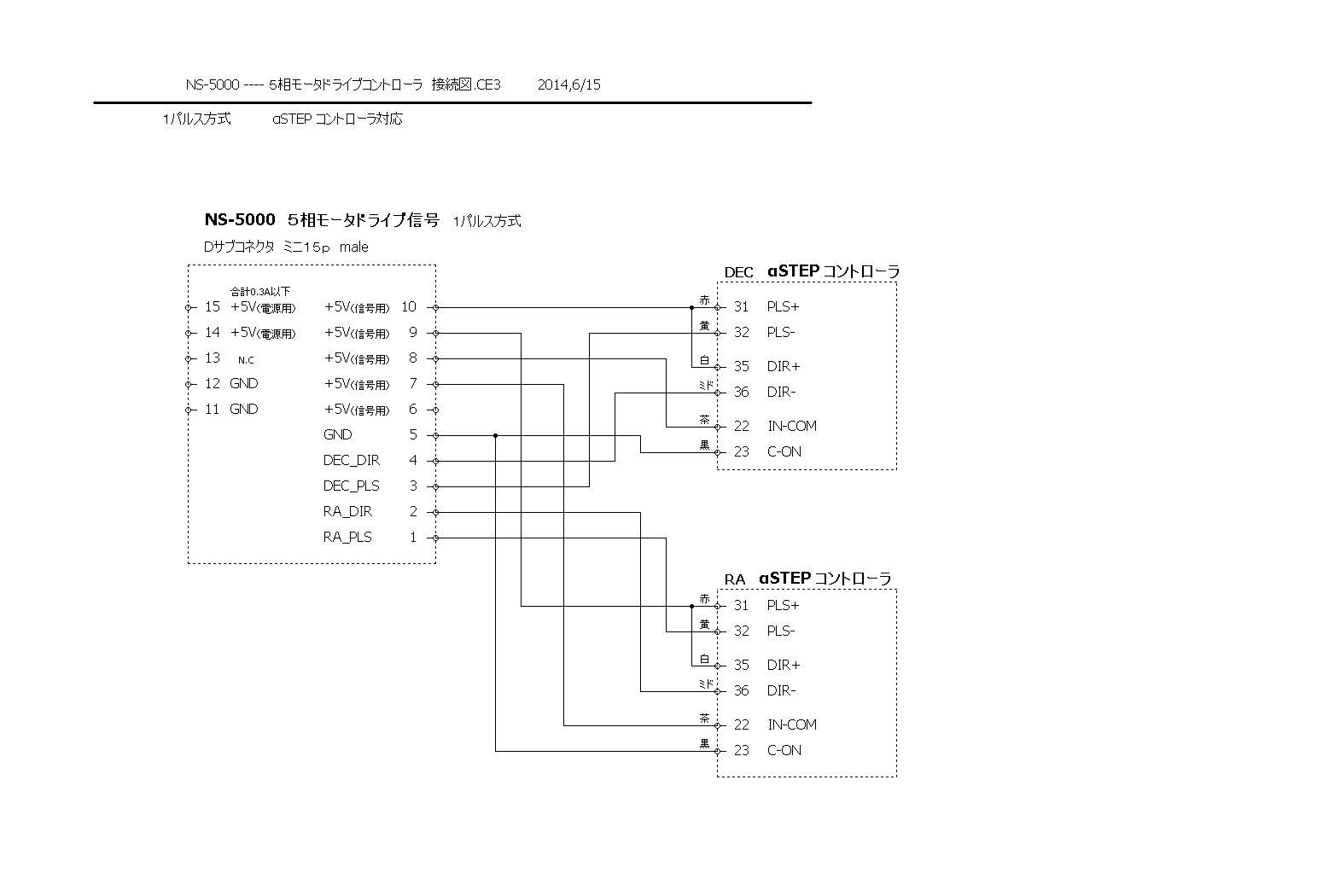
NS-5000-----αSTEP�R���g���[��������ɓ����Ă��܂��B
>�@�A���������@�E�E�E�E�E�X�e���i�r�Q�[�^Ver.8�ɂČ��œ������Ƃ�ؐ��������
>�@�@�@�@�@�@�@�@�@�@�@�@�@ ��薳������ɓ���܂����B�ؐ��ƌ����J��Ԃ�������������
>�@�@�@�@�@�@�@�@�@�@�@�@�@ �݂܂�������肠��܂���ł����B
���������͖��Ȃ��悤�ň��S���܂����B
�������A�O�i���S�j�̂��߁A�ȉ��ɂ��Ă����ӂ��������B
�P�@�n�����t�߂ł́A�����ݒ�i�����A�A���C�����g�j�͔����ĉ������B
�Q�@�n�������ł̏����ݒ�i�����A�A���C�����g�j�͋֎~�Ƃ������Ƃɂ��Ă��������B
�R�@�n�����t�߁A�n�������œV�̓����������ꍇ�́A���}�����Ȃ���A�蓮�������Ă��������B
�S�@���������ł́A�o���Ȃ��Ǝv���܂����A�蓮����Ŗ]������V�̖k�ɂ�ʉ߂��āA
�@�@�Ⴆ�Γ����琼���֔��]�����ꍇ�́A���������̑O�ɁA�K���K���ȓV�̂ōĂя����ݒ�i�����A�A���C�����g�j���Ă��������B
�@�@�i�e�X�g�ł͑��v�ł������A���̂悤�ȏ͑z�肵�Ă��܂���̂ŁA�S�z������܂��B�j
>�@�B���X�|���X�@�E�E�E�E�E����Box�Ń{�^���������Ă��王�삪�����܂ł̎��Ԃł���
>�@�@�@�@�@�@�@�@�@�@�@�@�@�@
�^�C�����O�͖w�ǖ����o�b�N���b�V�����w�NJ����܂���ł����B
>�@�@�@�@�@�@�@�@�@�@�@�@�@�@
�����A�X�s�[�h�ݒ�������ɂ����ꍇ�ɑ��x�̑��������x
>�@�@�@�@�@�@�@�@�@�@�@�@�@�@
���x���Ƃ̃R�����g���܂����̂Ŋ�{�ݒ�t�@�C���̑��x
>�@�@�@�@�@�@�@�@�@�@�@�@�@�@
�X�e�b�v���Ԃ�i�K�I�ɉ����ŏI�I��512��10�ɐݒ肵�܂����B
>�@�@�@�@�@�@�@�@�@�@�@�@�@�@
�W����NS-5000�ƈ���ăX�e�b�v���Ԃ�ς��Ă��ω����銄��
>�@�@�@�@�@�@�@�@�@�@�@�@�@�@
�����܂芴���܂���ł����B���̃R�}���h�̋@�\�͐����Ă���
>�@�@�@�@�@�@�@�@�@�@�@�@�@�@
�̂ł��傤���H
���삷��̂͊m�F���Ă��܂����A�����A�����p���X��ݒ肵�ANEW�R�}���h�𑗂�����A���Z�b�g�i�d����OFF�A���u�[�g�j���Ă��������B���Z�b�g���Ȃ��Ɣ��f���Ȃ��̂����m��܂���B
��
#:=CRU0280#
KASOKU PULSE 640
#:=CRD0140#
GENSOKU 320
#:=CDU0280#
KASOKU PULSE 640
#:=CDD0140#
GENSOKU 320
#:=NEW#
#:=R#
reboot
�`���U�O�����]�����̈��S��ɂ��čl���Ă��܂����B
�]�������傫���A�܂��g�p�������[�^���ɂ߂đ傫�ȃg���N�������Ă��܂��̂ŁA
�������A�듮��⑀��~�X�����������ꍇ�́A�d��Ȏ��̂ɂȂ�\��������܂��B
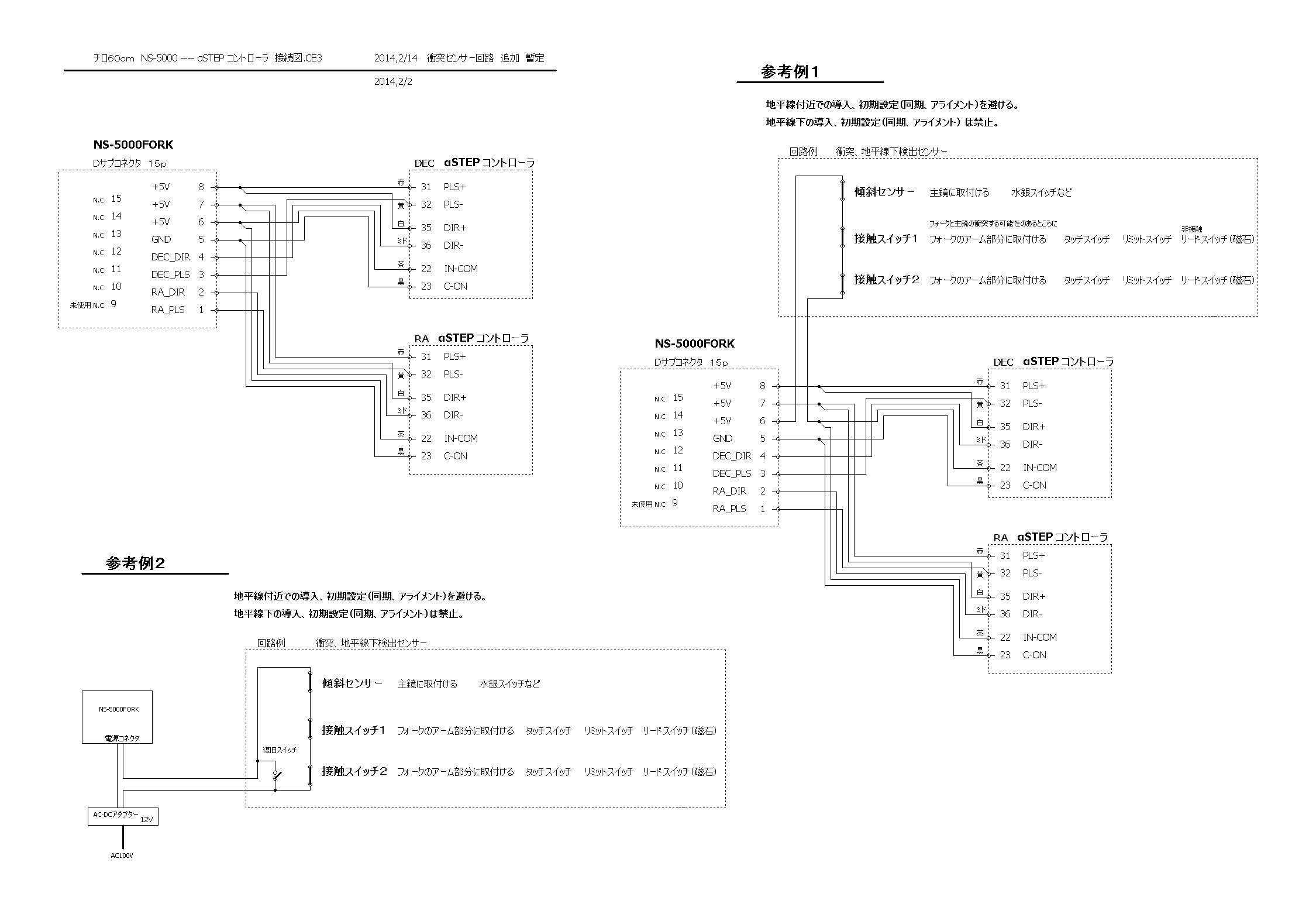
�����ŁA�Ɨ������n�[�h�E�G�A�ɂ��Փˌ��o�Z���T�[�̎�t���������߂��܂��B
����ɂ����}����p�ӂ��܂����B�Q�l�ɂ��Ă��������B
NS-5000----αSTEP�R���g���[���̐ڑ���H�̑��ɁA
�Q��ނ̏Փˌ��o�Z���T�[�̎�t�����@�ɂ��āA�Q�l��H���ڂ��Ă��܂��B
�Q�l��P
αSTEP�R���g���[����
C-ON
�M���𗘗p���āA�Փˌ��o���������Ă��܂��B
C-ON�̒ʓd���~�߂��αSTEP�R���g���[���͒�~���܂��B
�Q�l��Q
���n�I�ł���NS-5000�̓d�����ɏՓˌ��o�Z���T�[���V���[�Y�ɓ���Ă��܂��B
�P���ł����m���ɓ��삷��Ǝv���܂��B
�X�Z���T�[�������X�C�b�`���ǂ���������܂���B
�܂��A�ڐG�X�C�b�`�Ƃ��āiOMRON���i�������߂ł��j�^�b�`�X�C�b�`�A�}�C�N���X�C�b�`�A���~�b�g�X�C�b�`�����g����Ǝv���܂��B
�����x�A�����x�̃X�C�b�`������܂��̂ŁA������勾�A��]���H�A�E�I�[���z�C�����Ɏ�t����Ƃ����Ǝv���܂��B
�܂��A��ڐG�X�C�b�`�Ƃ��āA���[�h�X�C�b�`�i���j���g����Ǝv���܂��B
�Փˌ��o�Z���T�[�ɂ����S����A�C�y�ȋC�����Ń`���]�������^�p�ł���悤�ɂȂ�Ǝv���܂��B
��낵�����肢���܂��B�v
(2014,2/20)
���J�����̐V�^NS-300�p�G���R�[�_�[��DC���[�^���������܂����B
|
|
(2014,2/22)
���V�^DOG�i�r�Q�[�^NS-300
Ver6.27
�̊J���́A�قڏI�����Ǝv���܂��B
�����������������G���R�[�_����t���A����m�F���s���܂����B
�n�[�h�E�G�A�̕��͂܂������c���Ă��܂����A�̐S�̎蓮�����Abluetooth�A�Q�`�����l���͓��삵�܂����B
�e�X�g�ł́Abluetooth��Android�^�u���b�g�ARS232C��PC���̃X�e���i�r�Q�[�^V9�ŁA�����ڑ����s���A
�G���R�[�_����Ŏ蓮�������ł���̂��m�F���܂����B
���߃G���R�[�_�͂T�S�O�O�p���X�̗\��ŏ������Ă��܂������A�������Ă݂�ƁA�S���{�̂Q�P�U�O�O�p���X�̃G���R�[�_�ł����B
�������ǂ낫�܂������A�����Ɋ�{�萔��ύX���āA����ɓ����܂����B
��́ARS232C����bluetooth�A�_�v�^�ibluetooth�Q�`�����l���j�ƕύX����Ί����ł��B
����͏d�v�ȊJ���ł����B����ƈ��S�ł��܂��B
 �e�X�g����DOG�i�r�Q�[�^NS-300 Ver6.27 |
(2014,2/7)
���`���U�O�����t�H�[�N���ԓ��V��p
NS-5000FORK
Ver6.27 ���J�����܂����B
NS-5000
Ver5.26���x�[�X�ɂ��āA�������@���t�H�[�N�����������܂����B
�Ώۃ��[�^�́A�X�e�b�s���O���[�^�[���j�b�gαSTEP
�ł��B
http://www.orientalmotor.co.jp/products/stepping/ar/features/
PKP264,PK296�ɂ��Ή��ł��܂��B
���i������\��ł��B
�������x�́A�J�������W�O�O�{�����m�F���܂����B���P�O�O�O�{�����\��������܂����B
���ꂩ���ԓ��V�Ɏ�t��������@���e�X�g���s���܂��B
|
|
������Bluetooth��Class2�i�ʐM�����P�O���j�ɕύX���܂��B
�I�v�V������DOG
Bluetooth�A�_�v�^�ABluetooth�h���O��(USB�A�_�v�^)�ł����AClass
1����Class�Q
�֕ύX���܂��B
�����Class1
�A�_�v�^�̓��肪����Ȃ��Ă��܂����B�i���Y���~�H�j
�܂����i���Q�{�ȏ�ɏ㏸���Ă��܂��B���̂��߁AClass2
�i�ʐM����10m�j�ɕύX���܂��B
�܂��S�z����܂��A�d�g����т�����ƁA�Z�L�����e�B��̖�肪�l�����܂��B
Class1���Class2�̎��v��������͎̂��R�Ȃ��Ƃ����m��܂���B
�ʏ�A���\���̋����͕K�v�Ȃ��̂ŁA�قƂ�lje���Ȃ��Ǝv���܂��B
(2014,1/20)
�����܂������߂łƂ��������܂��B
���N����낵�����肢���܂��B
�Q�O�P�R�N��U��Ԃ�ƁA�悤�₭DOG
NS-5000���V���t�@���ɔF�߂���悤�ɂȂ��Ă����Ȃ��Ǝ������܂����B
�Ȃ��ł�NJP���[�U�[�l�̂��₢���킹�������܂����B��ς��肪�����ł��B
�������܂��o�������Ȃ��Ƃ�����܂����B���N�͂����ڎw���Ȃ���A�V�����J�����i�߂܂��B
�P�@�����̒x��ŁA�ȉ��̂����������҂������Ă��܂��B���q�l�ɂ͑�ϐ\����܂���B
�@�@�����[�����߂����ĕ��@���l���Ă��܂����A�����b�����҂��������B
�@�@
�@�@1
NS-5000PKP264A2NJP�@�@���{�L���s�@�@>���[�^���j�b�g����
���������� 2013,12/6
�@�@2
NS-5000MS5�@�@���ꌧ�L����s
2013,8/3
�@�@3
NS-5000NewATLUX�@�@�����s���c�s
2013,10/10
�@�@4
NS-5000PKP264A2NJP�@�@���s�{�����s
2013,10/18
�����NS-5000�{�̂̂ݔ����@2014,1/16
�@�@5
NS-5000PKP264A2NJP�@�@�A�X�g���V���b�vAU�l
�D�y�s 2013,10/28
�@�@6
NS-5000PKP264A2NJP�@�@��ʌ�
�������s 2013,11/6
�@�@7
NS-5000PKP264A2NJP�@�@���������ɍ��s
2013,11/20
�@�@8
NS-5000PKP264A2NJP�@�@�����s�������s�@�@2013,12/3
�@�@9
NS-5001GP �Q�Z�b�g�@�X�^�[�x�[�X�����l�@�@
2013,12/10
����������
2014,1/15
�@�@10
�A�X�g���V���b�vAu�l�@�@NS-5000PKP264A2
2013�N�P2��17��
����������2014,1/16
�@�@11
�A�X�g���V���b�vAu�l�@�@NS-5000PK264A3
2013�N�P2��17��
�@�@12
�A�X�g���V���b�vAu�l�@�@�V�^DOG�i�r�Q�[�^
NS-300
2013�N�P2��17��
�Q�@�`���U�O�����t�H�[�N���ԓ��V�pNS-5000
���J�����܂��B
�R�@NS-5000PKP264A2���A�X�RSE�R�P�O��^�ԓ��V���쓮�ł��܂����B
�@�@���q�l�i�A�X�g���V���b�vAu�l�j�����[�^�iPKP264-SG18�j����t�����܂����B
�@�@�����쓮�A���������͐���ɓ����Ă��邻���ł��B�ڂ��������܂����炲�Љ�܂��B
�S�@�V�^DOG�i�r�Q�[�^NS-300���J�����܂��B
�@�@�]����NS-300�����ǂ��āA�C���^�[�t�F�[�X��RS232C����bluetooth�ɕύX���܂��B
�@�@�܂��A���ʂȃI�v�V�����Ƃ��āAbluetooth�Q�`�����l���ɂ��Ή��ł���悤�ɂ��܂��B
�@�@�v���O���~���O�̕��͈ꉞ�ł��Ă��܂��B�������A����ƃe�X�g�͂��ꂩ��ł��B
�T�@DC���[�^�ɂ�鑽���R���g���[���̊J���B�ŋ߂��₢���킹���܂����B
�@�@���������ł��B���������邩���m��܂���B�V���Ƃ͒��ڊW���Ă��Ȃ��Ǝv���܂��B
�@�@���i�̎g�p�ړI��m��܂��APC����USB�C���^�[�t�F�[�X�����DC���[�^�iPWM�����j���R���g���[�����܂��B
�@�@PWM�R���g���[���͏��߂Ăł��B�����o���ɂȂ邩������܂���B
[HOME]
���̃T�C�g�Ō��J����n�[�h�E�G�A�[�A�\�t�g�E�G�A�[�Ȃǂ̏��A�f�[�^�A���̉����A���p�������̂̌��J��c���ړI�̔̔��Ȃǂ����f�肵�܂��B
















































{kind=link}
{kind=link}