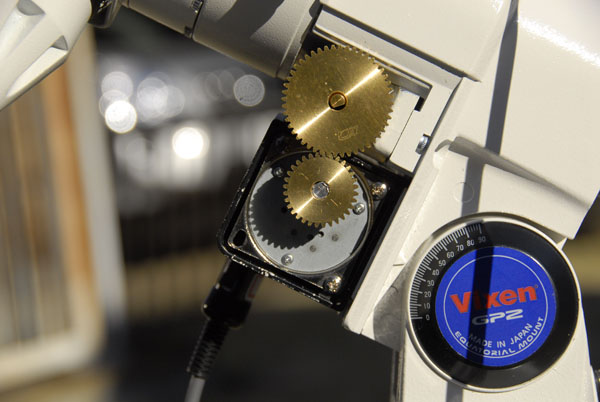
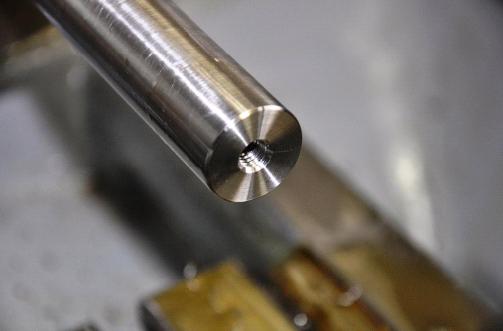
MS-4赤経軸ウォーム.jpg
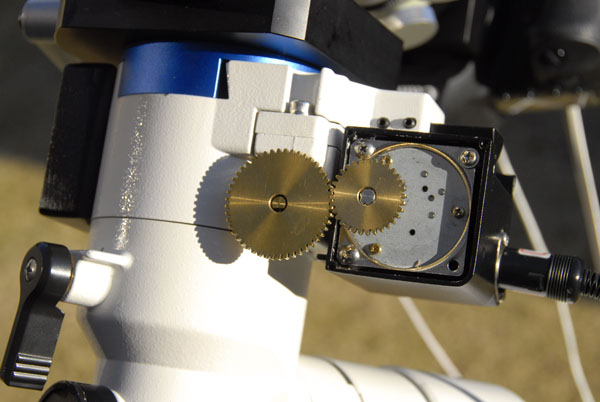
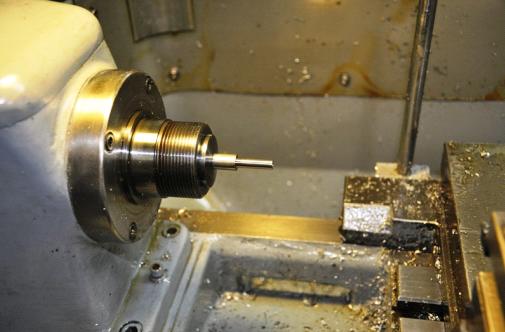
MS-4赤緯軸ウォーム.jpg
| 天体自動導入装置 DOG NS-5000 開発中 |
(2011,12/17)
■PENTAX MS-4のお問合せを頂いています。
MS-4赤道儀で自動導入ができないかお問合せをいただきました。
NS-5000をMS-4に接続する方法について調べていますが、実現できると考えています。
接続方法は2つあります。
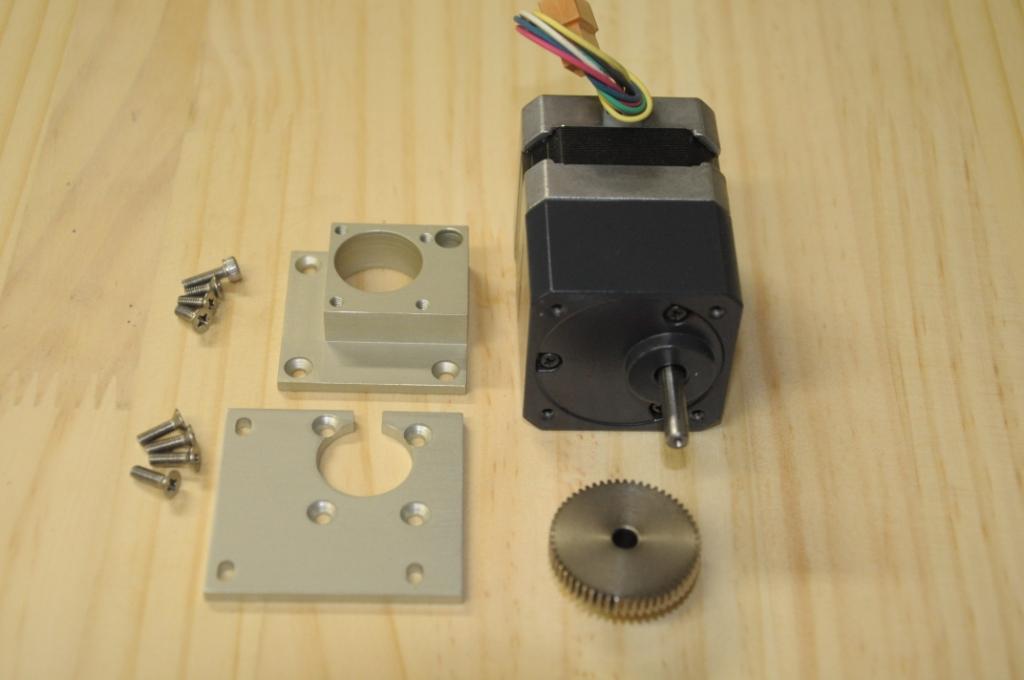
1 赤道儀の改造を行わず、純正モータに接続する。
2 ハイブリッドモータと交換して接続する。
■MS-4赤道儀の仕様、純正モータ、恒星時速度を調べました。
赤経 ウォームホイル:120mm径/歯数240
モータPF55-48(減速ギア:1/100 巻線抵抗:5Ω/相 電流:1A/相 ステップ角:7.5DEG/相 )
赤緯 ウォームホイル:90mm径/歯数180
モータPF55-48(減速ギア:1/125 巻線抵抗:5Ω/相 電流:1A/相 ステップ角:7.5DEG/相 )
モータは日本パルス PF55-48 PM型、電流はどちらも 1Aです。PM型ですが高速タイプのモータです。
これはハイブリッド型のNS-5000EM200HB、NS-5000NewATLUXと同じ電流です。
つまり、MS-4赤道儀はNS-5000EM200HB,NewATLUXで動かす事が可能だということになります。
PENTAX MS-4赤道儀
ハーフステップ(1/2分割) に於ける恒星時速度
赤経 計算
1ステップ角7.5゜、1/2分割 、減速ギア比100:1、伝達ギア比
1:1、ウオームギア240:1
恒星時速度 = (48 * 2 * 100 * 1 * 240) / 86164 = 26.740 pps
基本定数 (48 * 2 * 100 * 1 * 240) = 2304000 0x00232800
赤緯 計算
1ステップ角7.5゜、1/2分割 、減速ギア比125:1、伝達ギア比
1:1、ウオームギア180:1
恒星時速度 = (48 * 2 * 125 * 1 * 180) / 86164 = 25.068 pps
基本定数 (48 * 2 * 125 * 1 * 180) = 2160000 0x0020F580
以上から、モータの周波数特性と比較して、100倍速を超える可能性があると思います。
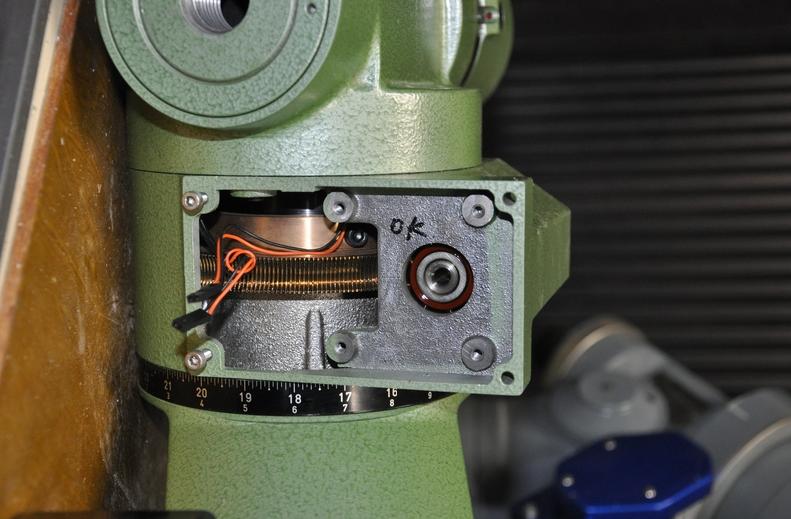
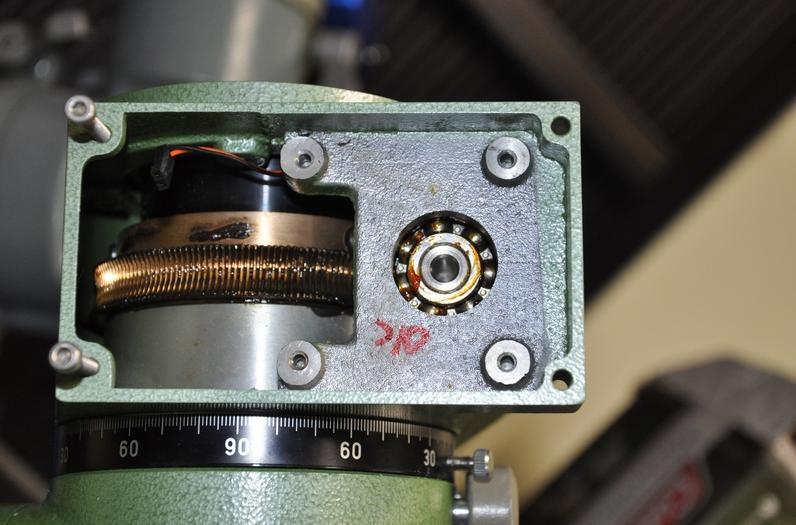
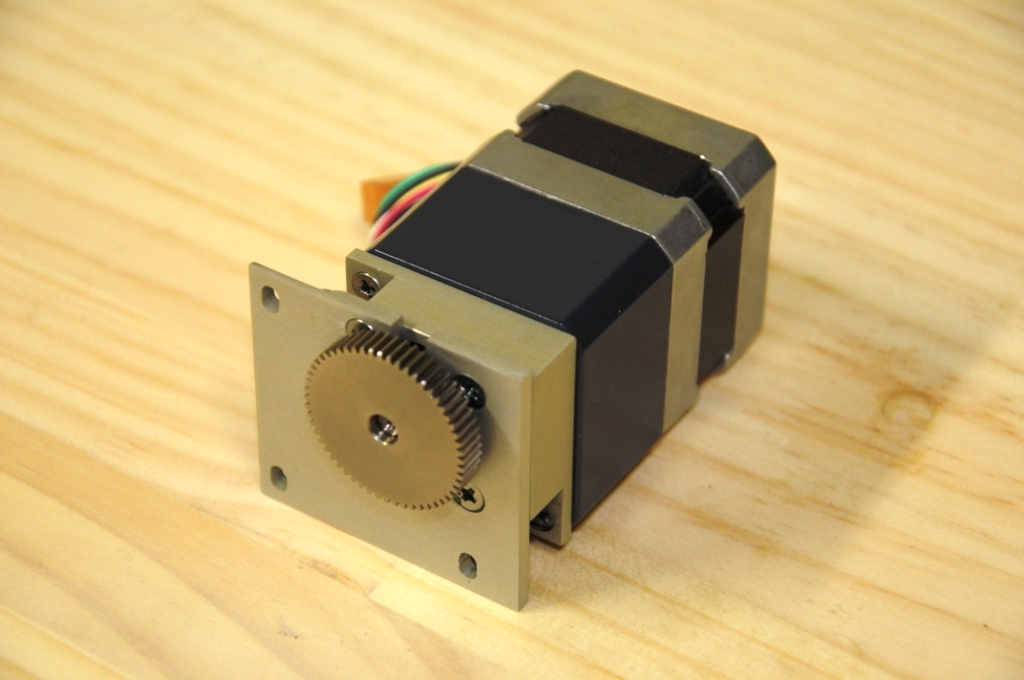
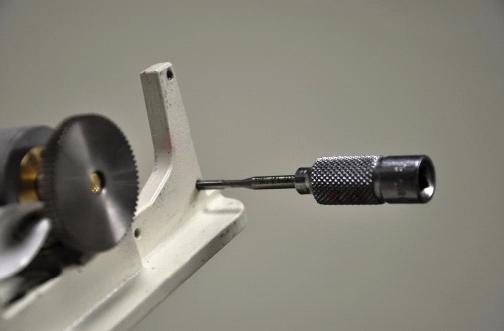
上記の純正モータの他に、ハイブリッドモータ取付け方法について調べています。
MS-4赤経軸ウォーム.jpg |
MS-4赤緯軸ウォーム.jpg |
(2011,12/12)
■お取扱店スターベース様のサイトにDOGを掲載していただきました。
DOGの他に、スターベースオリジナルセットもあります。
http://www.mmjp.or.jp/takahashi-sb/data/dogns501gp.htm
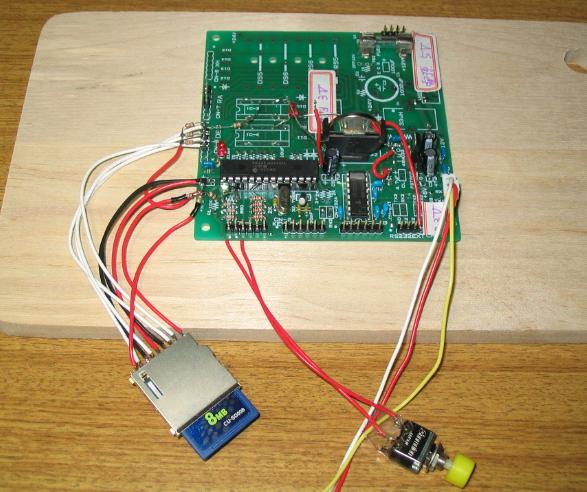
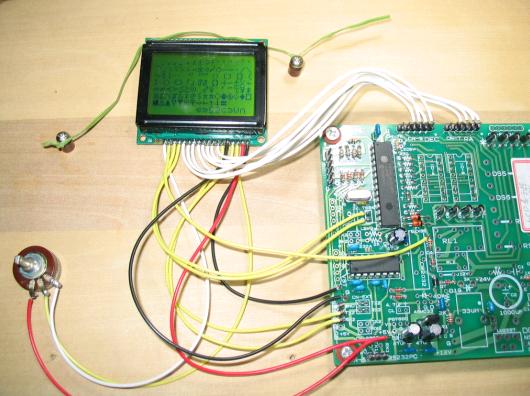
■グラフィック液晶表示用のプログラムを作っています。
後で役に立ちそうな各種表示プログラムを作っています。ハードは以前テストしたNS-2000基板を使っています。
画面に以下の文字を表示、反転表示しています。
8x8ドット 英数字、漢字(美咲フォント)
12x10ドット 数字
16x8ドット (8x8ドット文字を縦2倍寸にしたもの)英数字

(2011,12/9)
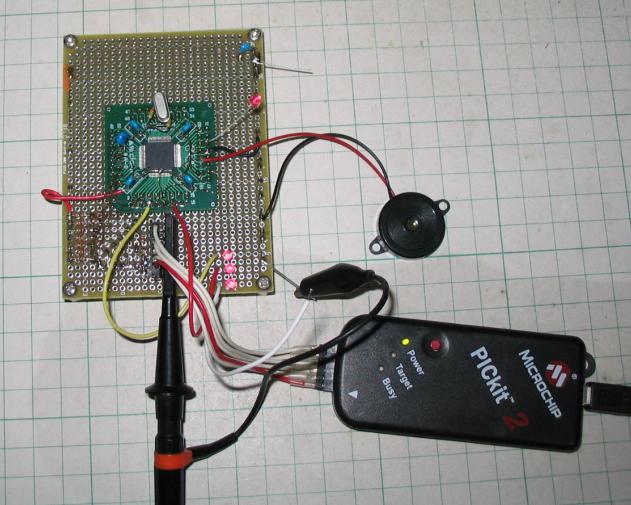
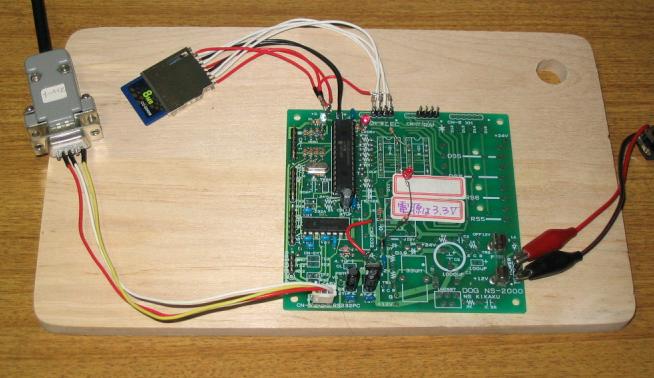
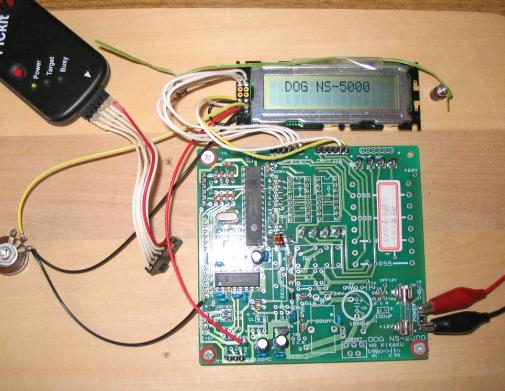
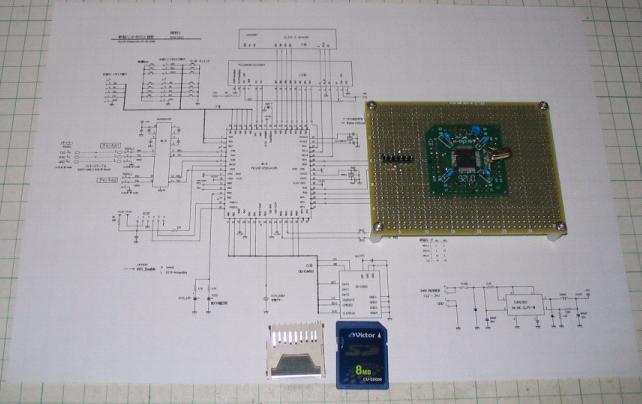
■新型ハンドボックスにNS-5000を移植できました。
新型ハンドボックスで使うPIC24FJ256開発用CPUボードに、NS-5000
Ver4.19を移植できました。
ご覧のようなCPUボードの中で、とてもNS-5000が動いているように見えないですが、
ランプも点滅し、ブザーも鳴り、測定器を使い赤経、赤緯のモータ信号が正確に出力されているのを確認しました。
これにマイクロステップドライバ、ハンドボックスをつなげば、自動導入ができます。
また、NS-5000の移植と同時に、グラフィックLCD表示器、SDメモリカード用のモジュールも初期化しました。
プログラムは以前に作ったものがありますので、順番に組み込み、テストをする予定です。
(2011,12/5)
■ギア比1.5 NS-5000の写真を送っていただきました。(2011,12/3を参照)
ギア比1.5GP赤道儀に改造してNS-5000をご利用いただいているお客様からメール、写真を送っていただきました。
オートガイド、自動導入に於いて、十分な実用性が確認されています。参考にしてください。
(2011,12/5)
80倍速での自動導入はかなりトルクがあり問題ありません。
ウエイトシャフトを手で強く押さえても支障ありません。
100倍速でも大丈夫ですが、シャフトを強く抑えると脱調するようです。
80倍速ではかなりのトルクが出ているようです。
実用上はこれで全く問題ありません。
バランスを合わせて眼視で使えばギヤ比1:1でも問題ありませんが、
撮影用の重い鏡筒を自動ガイドのため少しバランスを崩して
自動導入に使うためトルクがどうしても必要になります。
用途によってはギヤ比1:1でも問題ないと思います。
鏡筒 タカハシ スカイ90+407RD
オフアキ 三ツ星 OG7
カメラ Canon EOS 5D 2
ガイド装置 SSAG
架台 ビクセンGP
NS5000+MT-1+1:1.5ギヤ
電源 24VDCパワーサプライ
 |
 |
 |
 |
(2011,12/4)
■DOG NS-5000用ASCOMドライバが公開されました。
「ようこそくわなの星空へ」のmakkachiさんがNS-5000専用ASCOMドライバを公開されました。
U-150赤道儀用としてNS-5000をご利用い頂いておりましたが、makkachiさんは独力でASCOMドライバを開発されました。
このASCOMドライバにより、様々な天文ソフトから確実にNS-5000をコントロールできるようになりました。
ダウンロードして解凍すると、以下のファイルが入っていました。
NS5000 Driver.dll
DLL登録.bat
NS5000.reg
POTH.exe
サイトの説明にしたがって、
NS5000 Driver.dll は、C:\Program Files\Common Files\ASCOM\Telescope へコピーします。
DLL登録.bat 、NS5000.reg はそれぞれ、ダブルクリックして実行しました。
最後に、POTH.exe を C:\Program Files\Common Files\ASCOM\Telescope へコピー(上書き)しました。
以上の作業を行なうと、ステラナビゲータVer9 「望遠鏡コントロール」で以下の様にNS5000を選択できるようになりました。
選択し、プロパティで serial port (RS232C COM番号)、speed(9600bps)を入力してOKを押します。
次に、「日時・場所送信」ボタンをクリックしてください。これで自動導入の準備が完了しました。
特定の天体で初期設定してから、自動導入をしてください。

■DOG_BACKUP3.tclを改良しました。(バックアッププログラム)
DOG_BACKUP2.tcl にLX200関係の登録データを表示できるように改良しました。
ご利用ください。DOG_BACKUP3.tcl
(2011,12/3)
■説明書とNS-5000GP用初期化データを作りました。
初期化データ一式です。以下を追加し、全般に手をいれて読みやすくしました。
参考にしてください
1 TclProインストールの方法(NS_KIKAKUフォルダ)
Tcl/Tkのインストールの方法を分かりやすく解説しました。
2 ハイパーターミナルの設定方法(NS_KIKAKUフォルダ)
ハイパーターミナルの使い方を分かりやすく解説しました。
データ送信の様子が画面に表示されます。
3 GP赤道儀用 伝達ギア比1.5用初期化データ(GPDフォルダ)
GP赤道儀では通常は伝達ギア比は1:1ですが、お客様がトルクアップを実現するために
モータ側に32枚、赤道儀側に48枚の平ギアと交換されましたので、専用の初期化データを作成しました。
これにより、GP、GPD、SP・・赤道儀のトルクは1.5倍にパワーアップします。
恒星時速度は19ppsから28ppsとなり、最高速度は12Vで約50倍速、24Vで100倍速程度になると思われます。
トルク不足を感じて居られる場合は、これは解決策の1つになるでしょう。
■DOG NS-5000 2台発送しました。
左は、NS-201GP から NS-5000GP へグレードアップしました。
右は先日のミカゲ310赤道儀のお客様からのご依頼で製作しました。
4種類の赤道儀に対応できる特別仕様のNS-5000です。
電源スイッチはお客様からのご希望でプッシュスイッチに交換しました。
通常のトグルスイッチに比べ、出っ張りが少なく、強度があり、信頼性が高くなるでしょう。(お客様のご希望で対応できます)
主に移動観測、遠征にご利用されるそうです。
お客様は熱心に天体写真撮影に取り組まれておられ、何度もフォトコンテストに入選されています。
ビクセン社製 2011年カレンダー表紙「M8
& M20」はお客様の作品です。
 |
 |
■NS-5000プロジェクト(プログラム一式)をメンテナンス(整理、整頓)しました。
以下の手順でプログラム全体をメンテナンスしました。
1 NS-5000Ver4.18が最新のバージョンですが、プログラムサイズは18KW(ワード、54Kバイト)になっています。
CPUのROMサイズは22KW(64Kバイト)で残りわずかです。そこで、プログラムに手を入れ空き領域を増やしました。
2 もったいないですがE-ZEUS互換機能をバッサリ削除しました。これにより15KWとなりだいぶ空きが増えました。
参考にならないと思いますがE-ZEUSのプログラム(コマンドのところ)を紹介します。
プログラムはNS-5000システムのパラメータを参照、取り出し、加工を行なって、E-ZEUS互換機能を実現していますので、比較的シンプルになっています。
E-ZEUS互換機能をご利用になりたい場合は、バージョンアップの制限を付けていませんので、Ver4.18をインストールすれば可能です。
3 一部プログラムの見通しが悪くなっていたので、2軸コントローラ機能、自動導入機能を分離して別ファイルにしました。
4 プログラムは、修正、削除も含めて、念のため全てコメントアウトしてプログラムリストに残していましたが、これも大部分削除しました。
以上の作業を行なって、頭も含めて、すっきりしました。この状態を、Ver4.19とすることにしました。
今後は、Ver4.19をベースにして開発を継続します。
また、新型ハンドボックスはこのNS-5000のシステムの枠組みを利用して開発しますので、まずこれを移植します。
;*** NS-5000 CPUボード
;
; Ver 4.19 2011,12/2 NS5K_v4_18 new を Ver 4.19 とする。
;**
;5 NS5K_v4_18 new 2011,12/1 不要なコメントを削除した、プログラムを整理、簡潔にした。
; ハードを直接操作する命令はNS5000C_macro.iniファイルで記述し、赤道儀の種類はNS5000xxx.iniを用意して対処することにした。
; 赤道儀モードのコントローラ機能mmotor.s、自動導入機能goto.sは分離して、別ファイルにした。
; ROM、RESET、書き込みなど、フラッシュ関係のパラメータ追加を判りやすくした。
;4 NS5K_v4_18 new 2011,11/29 incファイルを一つにした。ファイル名の不備を修正した。
;3 N5000B_v4_18 renamed & refreshed without E-ZEUS 2011,11/29
ファイル名から、zeus名を除いて、元のファイル名に戻した。
;2 N5000B_v4_18 without E-ZEUS 2011,11/29 E-ZEUS関係の機能を削除した。ファイル名などはそのままである。
;1 Ver 4.18 を基にして作業を始めた。
;
;*********************************************************************************************
; Ver 4.18 2011,3/28 PECデータ収集機能(Timer5.s ,コマンド :=pr#
:=pd#)を追加した
; Ver 4.17 2011,2/1 offタイマー機能を追加した、1,2,3時間後に自動停止ができる。
; Ver 4.16 2010,11/21 Ver 4.15の".section *,psv,address(0x9000)"を廃止して(0x9400)に移した。これは、インターネット経由によるバージョンアップ用ではない。
; 12/5 天体自動導入に於いて常に北極星周りで反転導入するように変更
;**
(2011,11/9)
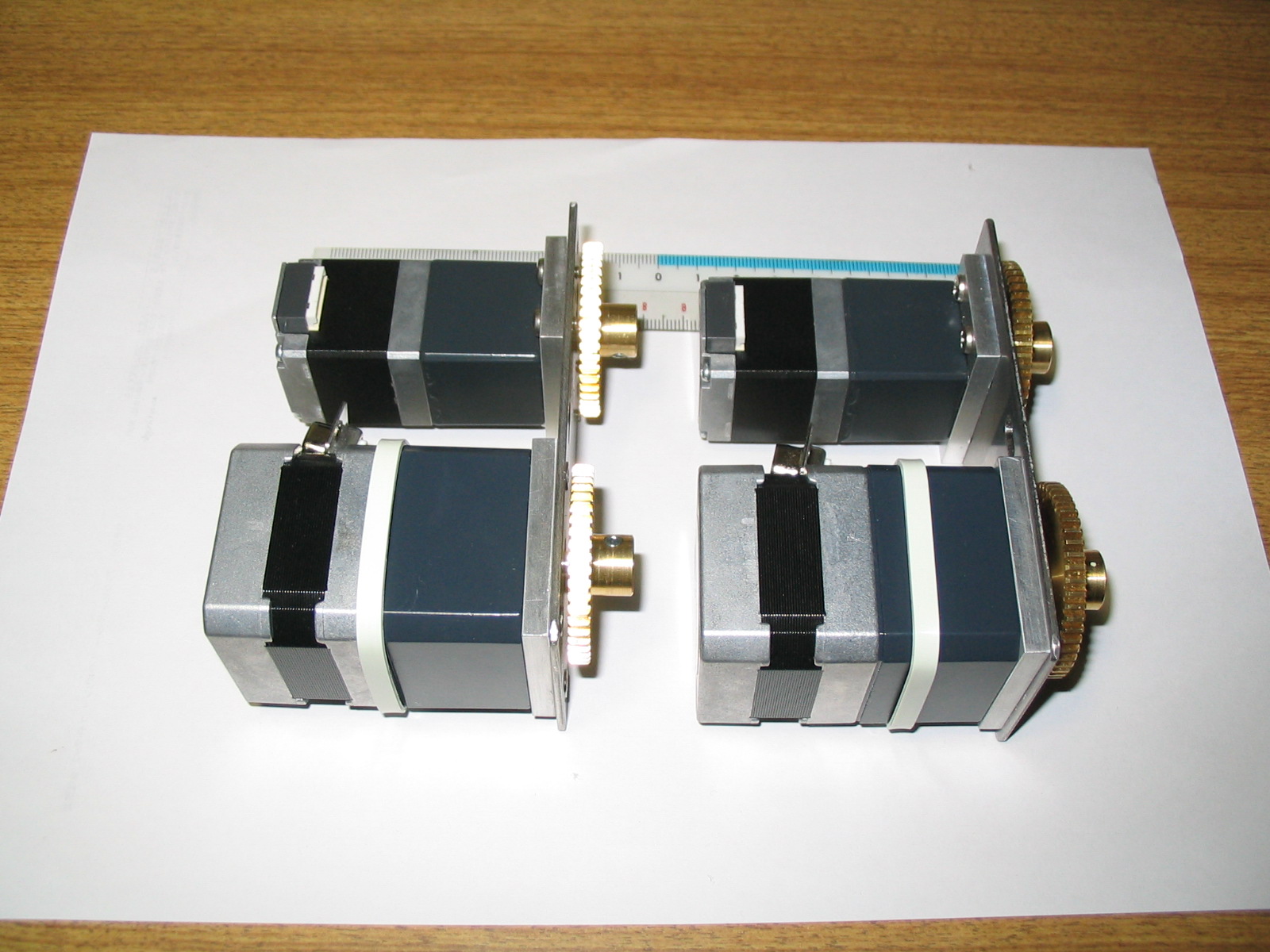
■DOG NS-5000EM200HB 2台発送しました。
EM200HBモータユニットは、今回が初めての製作でしたので、
製作、テストに時間がかかりましたが、今後は約3週間程度の納期になると思います。
最高速のテストを行いました。
恒星時速度 120pps 電源16V の状態で、350倍速で動くのを確認しました。
脱調することもなく快適に動きました。

写真を撮ってありますので、EM200HBモータユニット用ベース板の製作過程をご紹介します。
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
■新型ハンドボックスの続きです。
ずい分時間があきました。新型ハンドボックスの開発を再開しています。
新型ハンドボックスの用途として、以下の3つの製品化を考えながら検討しています。
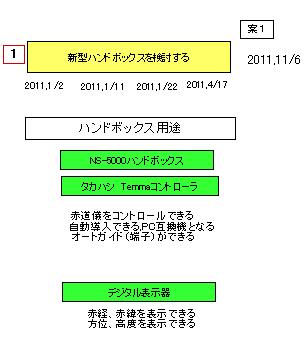
最初にもっとも基本的な土台となるNS-5000用新型ハンドボックスを作ります。
それからバージョンアップを繰り返して完成度を高めていきたいと思います。
タカハシTemmaコントローラの方は、ハンドボックスと共通する部分が多いと思いますので、
ハンドボックスの改造で対応できるのではと予想しています。
デジタル表示器はNS-300がありますので、比較的作りやすいでしょう。
まだまだ不完全ですが参考図を紹介します。
ご意見ご希望など、何でも結構です、メールをいただけますと参考になります。
(2011,11/1)
■NS-5000EM200HB ハイブリッドモータユニットが到着しました。
今日、工場の方からようやくモータユニット完成品が到着しました。
あとは、専用パネルに極軸ランプ用のLED,電池を取付け、モータ駆動テストを行なってDOG
NS-5000EM200HB の完成となります。
ご注文のお客様はあと少しお待ちください。
EM200HB
ハイブリッドモータユニット取扱説明書.pdf
 |
 |
 |
 |
(2011,10/23)
■説明書を用意しました。
以下の2件の資料が入っています。
1 コマンドの送信方法
ユーティリティソフトを使って、DOGへコマンド送信方法について説明しています。
例えば、恒星時速度、ガイド速度、バックラッシュ補正を微調整したい場合に便利です。
NS-100/300/500/5000に共通しています。
2 マイクロステップ切替方法について
これまでは外部にマイクロステップ切替スイッチを取り付けていましたが、
不用意にスイッチを動かすお客様がおられましたので、本体に内蔵することにしました。
ショートピンを使ったマイクロステップ切替の方法を説明しています。
■旧アトラクス用 NS-5000を2台作りました。
発送しました。

どちらも旧アトラクス赤道儀用ですが、
左は本体にオートガイダーVSTを内蔵しています。またST-4接続ケーブルを作りました。
右はお客様からのご希望で、旧アトラクス+NJP 兼用として作りました。
モータはPX243(高速型、中古モータを使いました、電流は旧アトラクスと同じ0.6Aです。)が付属しています。
モータ電流が同じですので、1台のNS-5000で2種類の赤道儀に対応できます。
■EM200/200B用 パネルを作りました。
ステンレス板で作りました。将来はシルク印刷したいですが、当分この様なパネルを使います。
肝心のハイブリッドモータユニットの方は、1号機は完成し、2号機目も8割方完了しています。
ユニットの取扱説明書を作っています。
ご注文を頂いていますので、駆動テストをしてから、発送する予定です。
(2011,10/15)
■電源ケーブルの極性を変更しました。
2011年9月よりDOG、VST・・全ての電源コネクタ、電源ケーブルの極性を以下のとおりに変更しました。
電源の極性は付属のケーブルをお使いになる限り問題になりませんので、ご安心ください。
新しい電源器、ACアダプターをご利用になる場合、極性に十分ご注意ください。
新しい電源ケーブルの極性です。極性は全ての製品で同じです。
電源電圧は製品により異なります。写真はNS-5000用です。(12~24V)
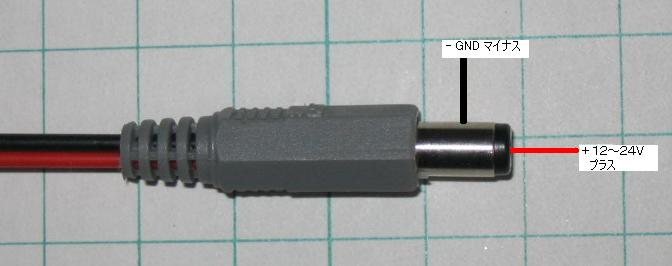
2011年9月以前の製品は以下のように定義していました。現在は使っていません。

■EM200/200B用 NS-5000の続きです。
EM200用 NS-5000EM200HB の製作を進めています。専用のハイブリッドモータユニット試作機ができました。
赤緯モータとしてPK223を使ったのは、極軸の視野を遮らないようにする為ですが、試作機では少々遮蔽率が高くなりました。
そこで遮蔽率を5割以下にするため、改良する予定です。
 純正VS試作機_1.JPG |
 純正VS試作機_2 .JPG |
 純正VS試作機_3 .JPG |
 試作ユニット取付状況 .JPG |
 現状極望遮蔽率.JPG |
 改良案極望遮蔽率.JPG |
(2011,10/1)
■ニューアトラクス赤道儀の続きです。
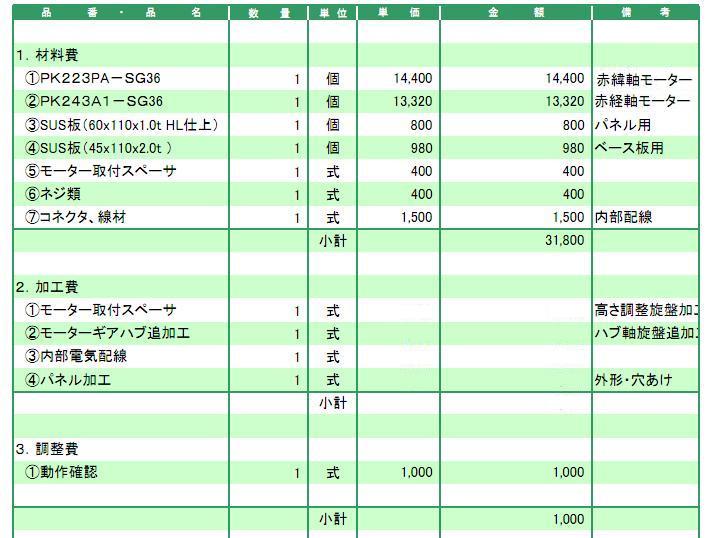
ニューアトラクス用NS-5000のモータ、伝達ギア比、恒星時速度等について説明します。
モータは、赤道儀の設置スペースの都合から以下に決めました。
赤経 PK223PA-SG36 取付角28mm
赤緯 PK243A1-SG36 取付角42mm
どちらも周波数特性が良く高速向けのモータですが、PK223はPK243より一回り小型になり、トルク不足が心配でした。
できれば赤経にもPK243を使いたいところですが、ニューアトラクス赤経モータスペースの制約から、内蔵可能なモータはPK223しかありませんでした。
下はギアヘッドがSG18(18:1)、SG36(36:1)の仕様です。
PK223PA-SG18

PK223PA-SG36

SG18からSG36に変更すれば、トルクは2倍になるはずですが、
励磁最大静止トルク(出力トルクに相当します)、許容トルク(ギアヘッドにかけられる)は変化がありません。
トルクは確かに約2倍になりますが、許容トルク(約4Kg=0.4Nm)から制限されていると思います。
赤緯体を載せた赤経軸の駆動に4Kgのトルクで対応するのは、たとえ実力はこの数倍?はあるとしても気になりました。
問題はギアヘッドの4Kgの許容トルクにあります。これを大きくすることができれば、トルクに余裕が生まれます。
そこで今回は赤経の伝達ギアを工夫して 1.8
: 1(72 : 40) のギア比を実現しました。
これにより、出力トルク、許容トルクはどちらも1.8倍に増えました。
また、恒星時速度は以下の4種類から選択することが可能になりました。
マイクロステップ 54 108 216 433pps
赤緯 PK243A1-SG36 の方は、他でNJPモータドライブでも使われているものですから心配ないでしょう。
ちなみにNS-5000NJPでは、これよりも大型の PK264A2SG7.2 (取付角60mm)を使っています。
また、先日のミカゲ310赤道儀でも全く同じ
PK264A2SG7.2 を使いました。大型赤道儀でも十分なトルクがあります。
動画 ミカゲ310 NS-5000 250倍速 自動導入(2011,9/12)
近日価格を掲載する予定です。
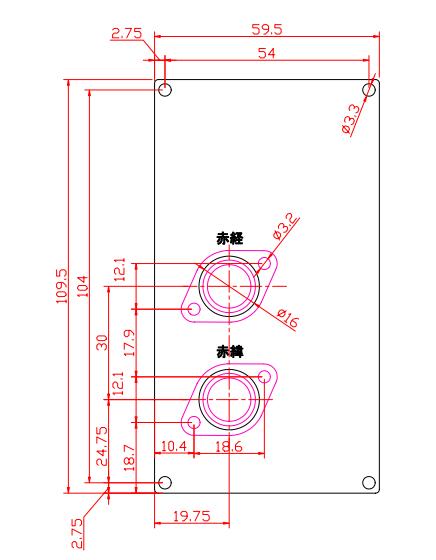
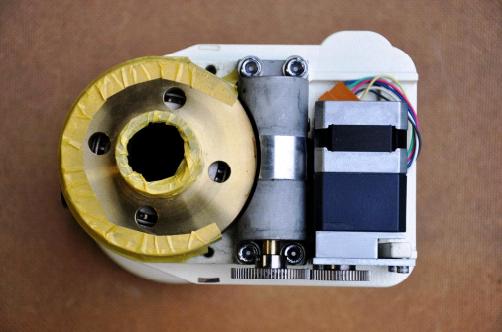
写真右、赤経モータ取り付け金具を製作し、中間ギアを設けました。
 ニューアトラクス オリジナルモータ |
 DOG NS-5000NewATLUX 伝達ギア比 1.8 |
■EM200/200B用 NS-5000のお知らせです。
現在、EM200赤道儀用ハイブリッドモータ型 DOG NS-5000
の製作を進めています。
技術的な問題は解決しています。コスト計算も終わっています。あと2~3週間後に1号機が完成する予定です。
専用のハイブリッドモータユニットとパネルを作ります。
ハイブリッドモータユニットは、オリジナルのPM型モータユニットと交換しますが、なるべく簡単にドライバ一本で取り付けられるようにします。
パネルの方は、お客様のニーズに備えて、DINコネクタ、アトラクス互換アンフェノールコネクタの二種類を作る予定です。
モータはニューアトラクスと同じものです。赤経、赤緯が逆になり好都合になりました。
赤経 PK243A1-SG36 取付角42mm
赤緯 PK223PA-SG36 取付角28mm
最高速度は、ニューアトラクスの経験から300倍速以上になるでしょう。
それから、現在販売しているNS-5000EM200(オリジナルPM型モータ)からのグレードアップにも対応しますので、ご安心ください。
ハイブリッドモータユニット概要図(暫定)
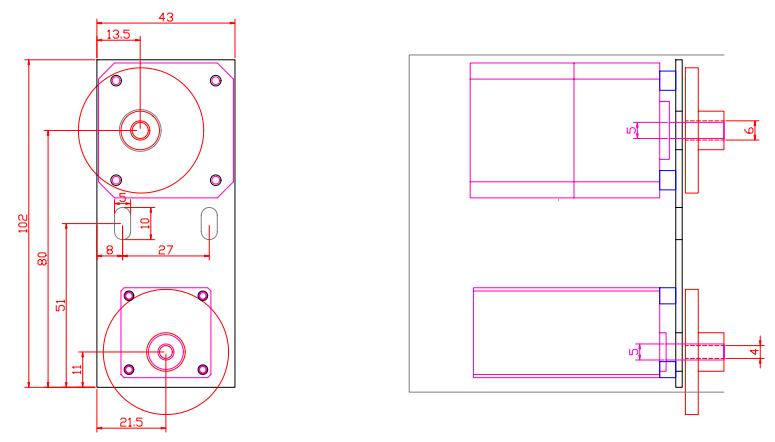
モータユニット+パネル コスト見積もり
パネル(暫定)
(2011,9/18)
■DOG NS-5000GPをお使いのお客様からメール、写真が届きました。
(NS-500GP -> NS-5000GPへグレードアップしています)
2011,9/3
本当は、NS-5000で撮影した写真も一緒にお送りさせてもらいたいと思っていたのですが、一向に天気に恵まれず、天体の写真は、この機材でNS-500で撮影したものを添付させていただきました。
赤道儀 : ビクセン スーパーポラリス赤道儀(赤緯体にモーター取り付け部がない初期型です)
MT-1モーターを両軸に取り付けています。
撮影鏡筒 : タカハシ FS-60CB(専用レデューサーC0.72×付き)
ガイド鏡 : ビクセン A80SS
撮影カメラ : キヤノン EOS Kiss X3(IR改造)
ガイドカメラ : WATEC WAT-120N+
といった構成で、ガイドソフトはiAGを使わせてもらっています。
ガイドカメラが超高感度なので、普段はガイドマウントは外しています。
黒いケースに入っているのがNS-5000とリレーボックスです。
まだ、NS-5000は実戦で使えていませんが、NS-500での撮影は快適そのものでした。
Cartes du Cielに表示させた写野フレームを使って、PC上でフレーミングできるため、手動導入時と比べて飛躍的に撮影歩留まりがアップしました。
写真の北アメリカ星雲とペリカン星雲も、PC上でフレーミングして、一度試し撮りをしてフレーミングの微修正を行うだけでした。
また、MT-1モーターはギアボックスに遊びがかなりあるため、NS-5000のバックラッシュ補正機能も非常にありがたい機能です。

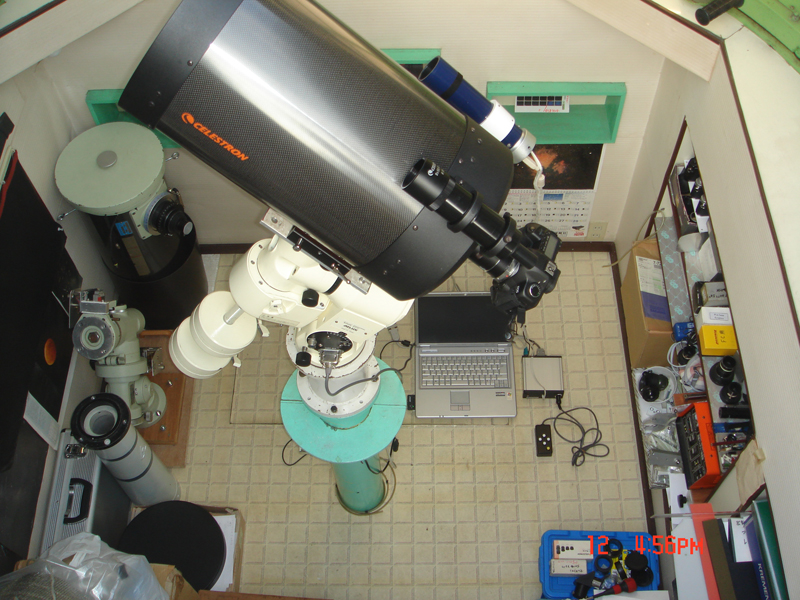
■DOG NS-5000ATLUXのお客様から写真を送っていただきました。
きれいに整理された使いやすそうな観測室です。
 |
 |
 |
■ニューアトラクス赤道儀の続きです。
作業が終わりお客様に納品しました。
最終的な駆動テストでは、
手持ちの電源16Vの場合ですが、
300倍速で良好に動きました。加速、減速はなめらかで、きれいな高音で動いていました。
また350倍速でもほとんど問題ありませんでしたが、一度脱調しましたので、24V電源にすれば可能性があると思います。
お客様から写真が届く予定です、あとでご紹介します。
 |
 |
|
 |
 |

作業が終わったニューアトラクス赤道儀です。
(2011,8/28)
■お客様からミカゲ310の写真を送っていただきました。
DOG NS-5000MIKAGE310は完成して天体自動導入ができるようになりました。(2011,7/23 参照)
7月8日に最初のご案内を送り、いろいろな問題、疑問について検討してから、8月4日に
DOG NS-5000Mikage310 を納品しました。
赤道儀モータケーブルの配線、ギア調整などは、お客様が行われました。
しばらくNS-5000のテスト、調整作業等を経てようやく今日作業が終わり、ミカゲ310赤道儀の写真を送っていただきました。
今回のミカゲ310赤道儀では多くの経験を積むことができました。
その時の問題、作業等について、後でご紹介したいと思っています。
 |
 初めて写真を見た時は、その大きさに圧倒されました。 |
 |
 |
 |
 NS-5000MIKAGE310は、架台の中に入っています。 |
 |
■新旧二種類のアトラクス用DOG NS-5000を作りました。
左がニューアトラクス用、右は旧アトラクス用です。
どちらもオートガイダーVSTを内蔵しています。
性能は同じですが、モータが異なるので、ドライバ出力電流が違っています。
明日発送の予定です。

(2011,8/24)
■ニューアトラクス赤道儀の続きです。
赤道儀のウエイト軸を、ステンレス(SUS304)φ25mmの棒(2011,7/31)で新しく製作しました。
この時の作業内容もご紹介します。
現在のところご案内方法については未定ですが、このようなウエイト軸、その他の加工、製作を行うことができますので、
ご希望のお客様はお問い合わせ下さい。お見積りします。
 現品長さ採寸.jpg |
 長さ寸法ケガキ.jpg |
 高速切断機で寸法カット.jpg |
 切断後.jpg |
 旋盤加工1_端面加工前.jpg |
 旋盤加工2_端面切削中.jpg |
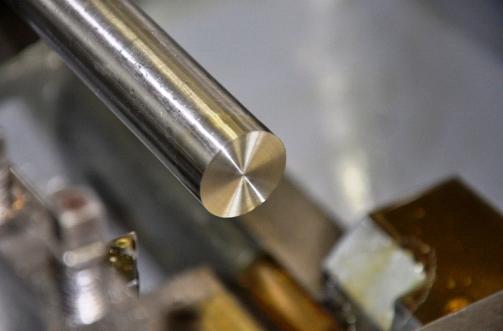 旋盤加工3_端面切削後.jpg |
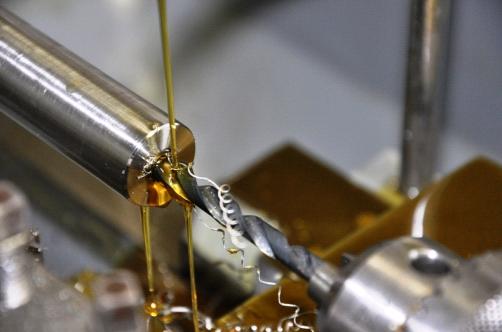 旋盤加工4_ネジ下穴あけ.jpg |
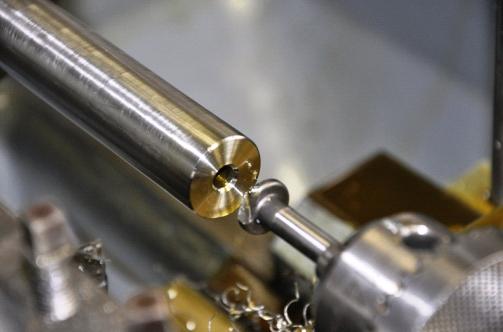 旋盤加工5_ネジ下穴メントリ.jpg |
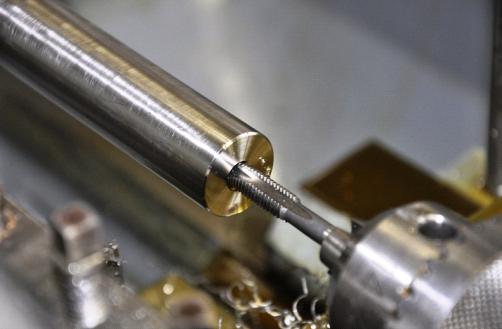 旋盤加工6_タップたて.jpg |
 旋盤加工7_端面加工片側終了.jpg |
 加工前比較.jpg |
 加工後比較_1.jpg |
 加工後比較_2.jpg |
 ウエイト軸完成.jpg |
(2011,8/23)
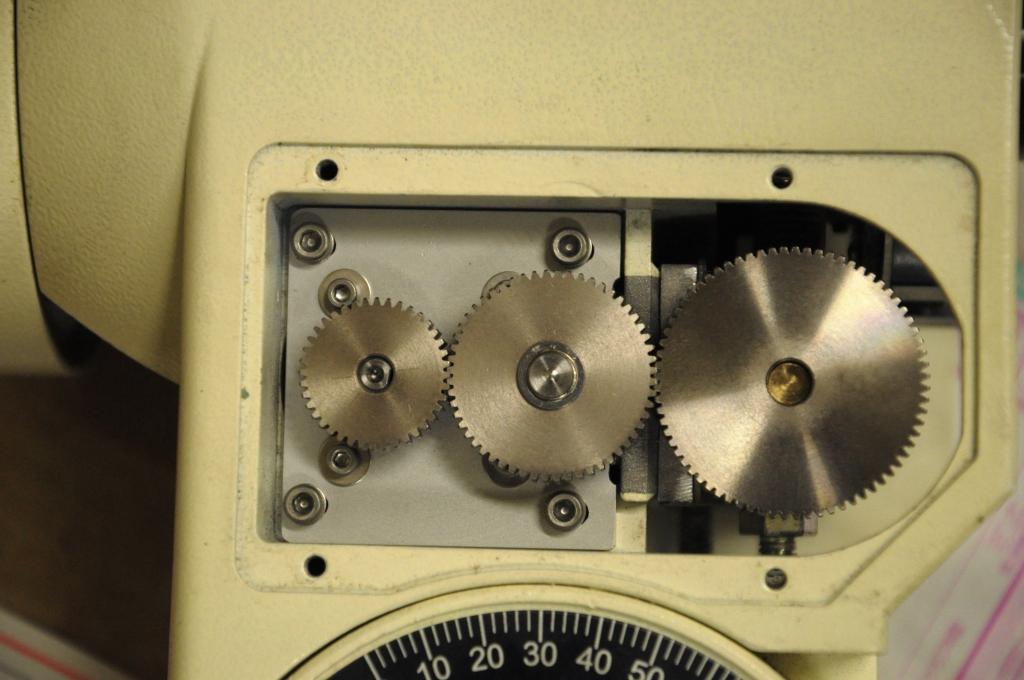
■ニューアトラクス赤道儀の続きです。
赤経側は現在作業中ですが、モータのギア加工、寸法確認作業の様子をご紹介します。、
①ギア追加工用冶具(φ5.98sus軸).jpg

②ギアハブ外径φ18→φ15切削加工.jpg

③新旧ギア&ハブ外径加工前後(右下が加工後).jpg
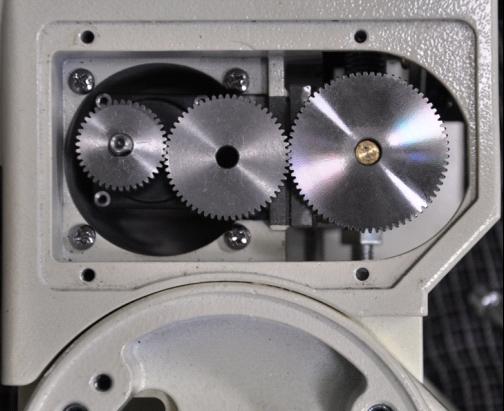
④赤経軸ギアトレーン確認.jpg
(2011,8/21)
■ニューアトラクス赤道儀の続きです。
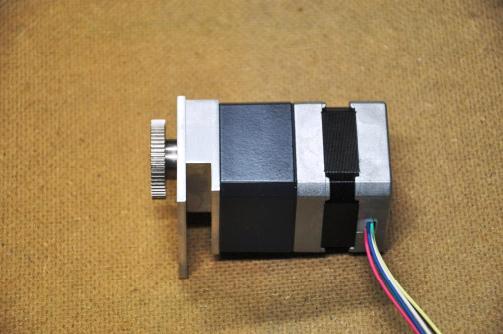
DCモータを外して、ステッピングモータPK243,PK223を取付け、DOG
NS-5000NewATLUXで天体自動導入を実現します。
ご注文を頂いてからほぼ1月が経過しました。今回は初めての作業でしたので、データを採りながら慎重に作業を進めています。
一か月の作業期間を予定していましたが、少し遅れて、今月末、遅くとも9月第一週には発送できる見込みです。
お客様にはあと暫くお待ち下さい。
今日現在、作業状況は以下のとおりです。
①各部分解・清掃 --- 完了
②ウォームあたり調整 --- 完了
③電気配線 --- 完了
④赤緯MDメカ加工 --- 完了
⑤赤経MDメカ加工 --- 20%完了
⑥ウェイト軸再作 --- 完了
⑦各ネジ交換 ---完了
⑧総再組立て --- 未
⑨動作確認 --- 未
赤緯モータ組付の様子をご紹介します。
本格的な工作機械を使って作業を行っています。
 ①赤緯モーター取付アダプア_アルミブロック削り出し.jpg |
 ②赤緯モーター取付アダプア_アルミブロック_m3下穴.jpg |
 ③赤緯モーター取付アダプア_アルミブロック_m3タップたて.jpg |
 ④赤緯モーター取付アダプア_アルミ板_サラモミ.jpg |
 ⑤赤緯モーター取付アダプア_アルミ板_φ18穴明.jpg |
 ⑥赤緯モーター取付アダプア_アルミブロック組付jpg.jpg |
 ⑦赤緯モーター取付アダプア_アルミ板組付jpg.jpg |
 ⑧赤緯モーターユニット完成.jpg |
 ⑨赤緯ベース_M3ネジ再タップ(塗装除去).jpg |
 赤緯モーター組付_1.jpg |
 赤緯モーター組付_2.jpg |
 赤緯モーター組付_3.jpg |
(2011,8/6)
■ニューアトラクス赤道儀の続きです。
初めは恒星時速度 309pps を予定していましたが(2011,7/23 参照)、改良して 433pps にスピードアップする計画です。
********** マイクロステップ 1/16分割
赤経計算
恒星時速度 = (200 * 16 * 36 * 1.8 * 180)
/ 86164 = 433.183 pps
基本定数 (200 * 16 * 36 * 1.8 *
180) = 37324800 0x02398800
赤緯計算
恒星時速度 = (200 * 16 * 36 * 72/56 *
180) / 86164 = 309.416 pps
基本定数 (200 * 16 * 36 * 72/56 *
180) = 26660571 0x0196CEDB
以上の他にNS-5000は、マイクロステップ分割数を切り替えることができます。
他と比較しますと、
AXD(アトラクス デラックス)赤道儀 400pps マイクロステップ
旧アトラクス赤道儀 44pps ハーフステップ、1-2相励磁
NS-5000 ニューアトラクス赤道儀 433pps マイクロステップ 1/16分割
NS-5000 ニューアトラクス赤道儀 216pps マイクロステップ 1/8分割
NS-5000 ニューアトラクス赤道儀 108pps マイクロステップ 1/4分割
NS-5000 ニューアトラクス赤道儀 54pps マイクロステップ 1/2分割
(2011,7/31)
■ニューアトラクス赤道儀の作業の様子をご紹介します。
DCモータからステッピングモータに交換しNS-5000に対応させますが、
同時に赤道儀のオーバーホールのご依頼もいただきました。
オーバーホールは赤道儀の モータードライブを分解、清掃、調整します。
ただし、 メーカーのペイントロックの掛かったネジは精度保証が出来なくなるので外しません。
ニューアトラクス赤道儀を分解して調査したところ、以下のことが分かりました。
その結果、赤経・赤緯両軸ともウォームホーイールとウォームネジにガタが認められ
特に赤経軸はウォームネジの回転角度で5度近くバックラッシュがありました。
また、ウォームネジのスパーギアとモーターギアのバックラッシュが大きくありました。
大きなバックラッシュはハンチング動作の原因の一つになると考えられます。
モーターをステッピングモーターに置換しマイクロステップ駆動しても
肝心のウォームにバックラッシュが在ったのでは性能が出せませんので両軸ともウォームホイール/ネジの当たり調整を実施しました。
(外注先の技術者のメール)
到着時のニューアトラクス赤道儀
 |
 |
 |
 |
|
さらに、作業を進めたところ、(7/23)
本日各部クリーニングを実施しました。クリーニング中に気がついたのですが赤緯軸のメインベアリングの
固定ネジが緩んでおりスラスト方向に1mmほどのガタがありました。添付写真の赤緯軸ヘッドを見ていただくと
中央の黒い部分が赤緯軸のベアリングを締め込んでいる部品でこれが緩んでいました。推定原因はヘッド部
鏡筒取付用のM8ネジ2個の内の1個が長く固定ネジと干渉してしまった為と思われます。(写真では黒アルマイト
が削られています)。ネジを締め込み固定ネジ3個を増締めしておきました。
(外注先の技術者のメール)
 赤緯軸結合部 |
 赤緯軸ヘッド部 |
ウェイト軸現状 |
ウェイト軸がだいぶ錆びており、お客様にハードクロムメッキの再メッキをご案内していました。
しかし、作業のためにメッキを剥離したところ、予想以上にひどい状態でした。
ウェイト軸メッキ剥離後 |
ウェイト軸のクロムメッキを剥がしたところメッキ下地の錆が酷く旋盤で一なめしないとNGのようです。
一なめするとφ25がφ24.5とかに細くなってしまいガタが発生してしまいます。私の意見としては再クロムメッキを
行うよりステンレス(SUS304)のφ25mmの棒に材質変更をするのがベターかと思います。
(外注先の技術者のメール)
以上から、お客様にハードクロムメッキの再メッキからステンレス(SUS304)のφ25mmの棒をご案内して、
ご了解をいただきましたので、さっそく製作しました。以下は完成品です。
具体的な作業内容は、後でご紹介します。
上が加工前のステンレスφ25mm棒 |
完成品です。 |
(2011,7/23) (2011,7/25 一部訂正)
■ミカゲ310赤道儀、ニューアトラクス赤道儀用のDOG
NS-5000のご注文をいただきました。
作業が終わりましたら詳しくご紹介できると思います。
どちらも近々製品化する予定です。
ミカゲ310は大型赤道儀用として、2相、5相モータのシステムを用意します。
特に5相モータでは、最新のスムースドライブ機能(マイクロステップ、低振動、低騒音とともに超高速を実現します)に対応する、CRKシリーズを予定しています。
ミカゲ310赤道儀
お客様からのご連絡で、ウオームホイルは、赤経370、、赤緯300と判明しました。(2011,7/25
一部訂正します)
********** 1/16分割 伝達ギア= 44 : 22 = 2 : 1
赤経 計算
恒星時速度 = 197.874 pps
基本定数 (200 * 16 * 7.2 * 2 * 370) = 17049600 0x01042800
赤緯 計算
恒星時速度 = 160.438 pps
基本定数 (200 * 16 * 7.2 * 2 * 300) = 13824000 0x00D2F000
ニューアトラクス赤道儀
DCモータを取り外し、ステッピングモータに交換、取付け加工します。
********** 1/16分割 伝達ギア= 72:56
赤経 赤緯 共通
恒星時速度 = 309.416 pps
基本定数 = 200 * 16 * 36 * 72/56 *
180 = 26660571 0x0196CEDB
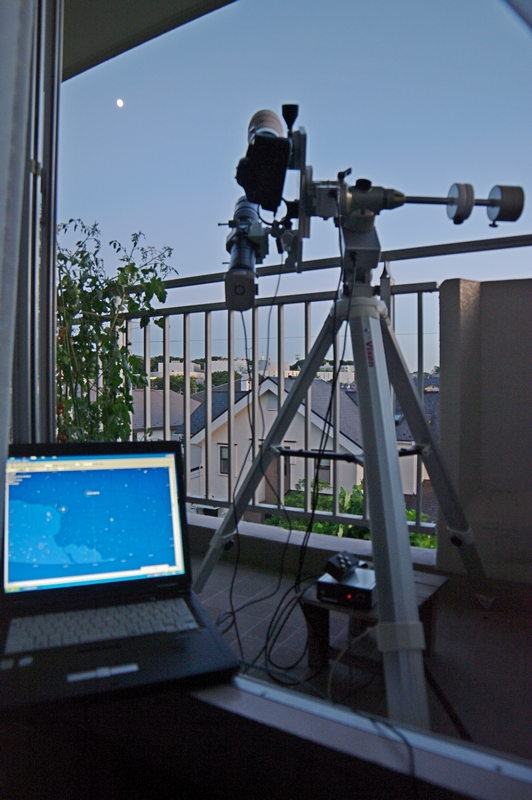
■DOG NS-5000GPをお使いのお客様(川崎市多摩区)から写真を送っていただきました。
お客様は川崎でベランダ撮影をされていますが、光害にもかかわらず素晴らしい出来栄えです。
 |
(2011,6/30)
■お客様からDOG NS-5000PLSを取付けた、自作赤道儀の写真を送っていただきました。
自作したとは思えない立派な赤道儀です。
回転方向の設定およびリモコンのスイッチもノーマルに
変更しました。今夜、星を見て追尾も確認しましたが
問題ないようです。写真は完成した赤道儀と望遠鏡です
望遠鏡は口径150mmF12です。重量も20キロ近くありますが
なんら問題なく動きます。
赤経5相ステッピングモーター PK564AW-T3.6 は600倍速で動きました。
それ以上はまだ試していません。

■DOGナビゲータNS-300が完成しました。
USBで接続するために、今回は写真の様にRS232C-USBケーブルを組み込んでみました。
専用のICやユニットがありますが、これも一つの方法だと思いました。
ドライバソフトのCD-ROMも付属して、却ってお客様には分りやすいかも知れません。
 |
 |
(2011,6/23)
■DOG NS-5000EM200、DOGナビゲータNS-300を製作しています。
左がご注文を頂いているNS-5000EM200です。
本体は完成しています。あとはEM200パネル(2~3日)を作れば完了です。
もう少しお待ちください。
右が先日ご注文をいただいたNS-300です。これは久しぶりのご注文でした。
今日、エンコーダ用のコネクタが入荷しましたので、次の作業に入ることができます。
エンコーダはパルステックです。
パソコンとの接続は普通はRS232Cですが、今回はお客様のご希望によりUSBで接続します。
また、電源もUSBから取り入れますので、USBバスパワーでNS-300は動作することになります。
消費電流は、NS-300、エンコーダの合計で約150mAと予想していますので問題ないでしょう。

(2011,6/10)
■ようやく DOG NS-5000PLS ができました。
お客様がご用意された5相モータ、マイクロステップドライバを使ってNS-5000PLSを製作しました。
5相モータは低速から超高速までスムーズに動いています。
はじめはCW,CCW2パルス方式でないとドライバが対応しないと思っていましたが、
幸いPLS 1パルス方式にも対応しており、作業が楽になりました。
マイクロステップ駆動は、両軸とも1/1~1/250分割までの16種類を指定することができます。
分割数はドライバのディップスイッチを切り替えて行います。後で変更もできます。
赤経側は1/8分割マイクロステップで動かしていますが、極めて低振動です。
モータに耳をあてて確認しなければ恒星時回転が分からないレベルです。
赤経
5相ステッピングモーター PK564AW-T3.6
マイクロステップドライバー MC-0514-Z
赤緯
5相ステッピングモーター PK543BW1-H50
マイクロステップドライバー DFC5107P

(2011,6/4)
■やっとPK264モータが到着してDOG NS-5000PK264NJPを製作できました。
震災の影響でオリエンタルモータの入荷が遅れていました。
お客様には大変お待たせしましたが今日発送しました。今後は徐々に改善されていくと思います。
左がNS-5000PK264NJP、2A出力、オートガイダー端子はVSTコネクタになっています。
また、本体にオートガイダーVSTを内蔵しています。
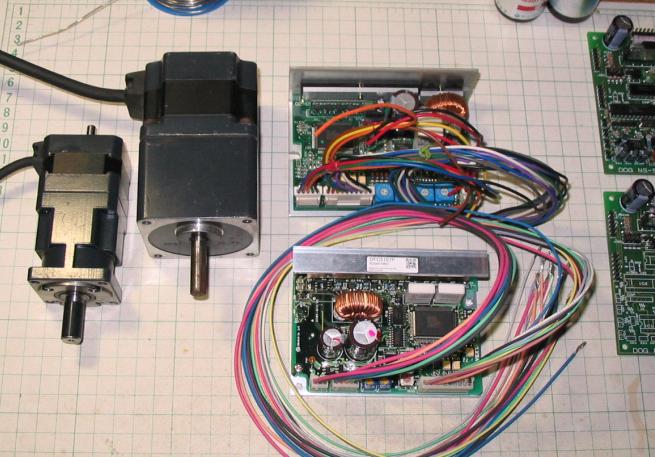
右が製作中のDOG NS-5000PLS(相当)です。
本体にNS-5000CPUボードと赤経、赤緯、5相モータドライブも一緒に内蔵します。
ケースは大きめを選びましたが、ご覧のような状態ですから、部品の取付けは慎重にやる必要があります。

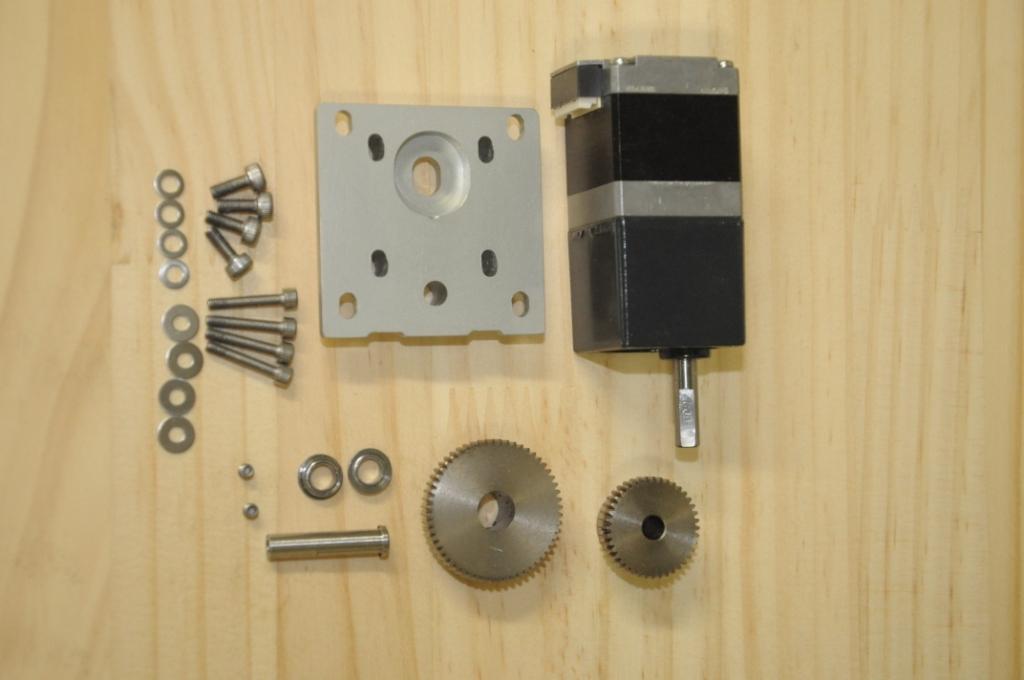
発送前にNS-5000PK264NJPのモータユニットのパーツを見てみました。
モータユニットの表面処理を変更しました。今まではホワイトナチュラル(アルマイト処理)でしたが、今回は光沢面に変えました。
ホワイトナチュラルも良かったですが、これもすばらしい高級感です。
 |
(2011,5/22)
■DOG NS-5000PLS(相当)のご注文を頂きました。
今日、お客様からNS-500CW と5相モータ、マイクロステップドライバが届きました。
NS-500CWからNS-5000へグレードアップのご依頼です。
ドライバの都合により、PLS(1パルス方式)ではなくCW,CCWの2パルス方式で対応します。
プログラムに手を入れる必要があり、少し難しい作業になります。
NS-500CWにつきましては、(2008,11/2)(2008,10/9)(2008,7/21)でご紹介しています。
今回は赤経のドライバは同じ物ですが、他の5相モータ、赤緯ドライバが変わりました。
(2011,5/14)
■お客様からDOG NS-5000組込み写真を送っていただきましたのでご紹介します。
今回は特別にCPUボードを提供させて頂きました。
写真はユーハン工業社製 U-150赤道儀の天体自動導入装置として製作されたものです。
これを赤道儀のピラー内に設置されました。詳細はホームページをご覧ください。
CPU関係の配線はとても上手にまとめられ、コンパクトに組み込まれています。
ユーハン工業 U-150赤道儀
1 オリエンタルモータ PK243A1-SG18 (減速ギア比 18:1)
2 ウオームホイル 288
3 伝達ギア比 1:1
4 1/16分割マイクロステップ
恒星時速度 = (200*16*18*1*288) / 86164 =192.526 pps
 |
 |
■なかなかデータが集まりません。PECデータ収集をぜひお願いします。
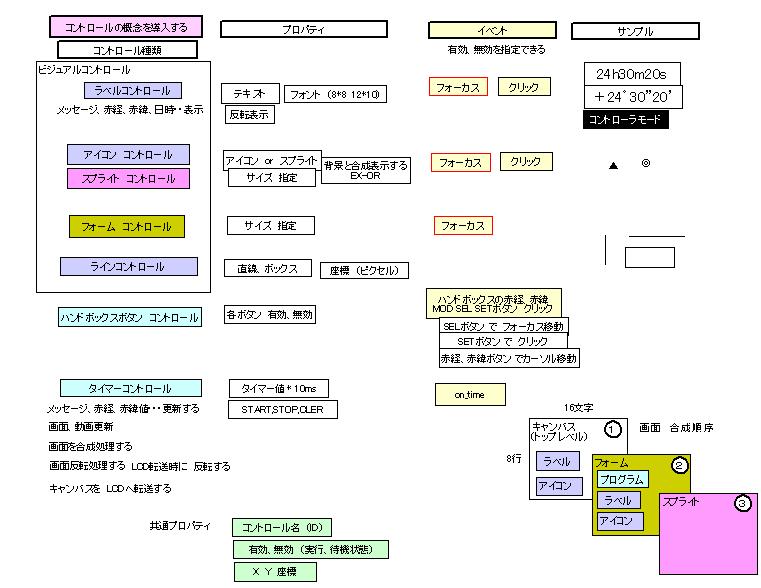
■新型ハンドボックス用 グラフィックLCD表示器のドライバソフトの続きです。
完成後も何かと修正や改良をすると思いますので、少し手間がかかりますが、表示関係のプログラムを工夫しています。
Windowsでは良く見かけますが、表示方法としてコントロールという考えを入れ、独立したプログラムのように、
グラフィック表示ができる部品を作りたいと考えています。


■DOG NS-5000は大型赤道儀にも対応していく計画です。
これまで主に中、小型赤道儀を対象にして製品化を進めてきましたが、今後は大型赤道儀についても対応します。
モータ、ギア、取付金具、パネル等を製作いたします。
2相、5相モータのいずれにも対応します。
それから、取付の為の出張作業も予定しています。
詳しくは後日ご案内します。
(2011,4/9)
■DOG NS-5000 Ver4.18 バージョンアッププログラムを公開します。
PECコマンドを実装しました。
これによりピリオディックモーションを数値データとして取り出すことができます。(2011,4/3)を参照して下さい。
初めにこちらをお読み下さい。
バージョンアップの前に、DOG_BACKUP2.tclで復元用初期化データファイルを作成してから行って下さい。
実行すると、以下の二つのファイルを作成します。
1 DOG_設定情報_xxx 設定情報 (初期化データの詳しい内容)
2 DOG_renew_xxx 復元用初期化データ (元の状態に簡単に初期化できます)
DOG_NS-5000_V4_18_4_7_11.lzh
ユーティリティソフト(PEC.tcl)
PECデータを収集する場合は、DOG NS-5000を初期設定して自動導入ができる状態にしてから、手動、またはオートガイドを始めます。
そして、ガイド中にパソコン側で PEC.tcl
を実行すると、PECデータファイルが自動生成されます。
連続してデータファイルを作成する場合は、同じファイル名で上書きされる恐れがありますので、ファイル名を変更してから行ってください。
■PECデータ収集のご協力をお願いします。
集められたデータはサイトで公開したいと思っています。
データを比較、検討すると、今後の開発の手がかりが得られると思います。また、新しい発見?があるかも知れません。
できるだけ沢山、各種赤道儀のデータを集めたいと思っています。ご協力よろしくお願いします。
データに簡単な説明を付けていただければ幸いです。(日時、作成者(ニックネームでOKです)、赤道儀(シリアル番号)、ガイド方法、望遠鏡、メモ・・・・)
可能でしたら、同じ場所で(DOG32が同じ範囲。だいたいで結構です。尚、NS200_Navigator_1_1.EXEの赤経モータパルスはDOG32と同じものです)もう一度PECデータを作って頂けると、ピリオディックモーションの再現性の確認ができ、大変有益な情報が得られると思います。
PECデータ収集では中周期にこだわる必要はありません。ガイドが許す限り、長時間の収集が可能です。
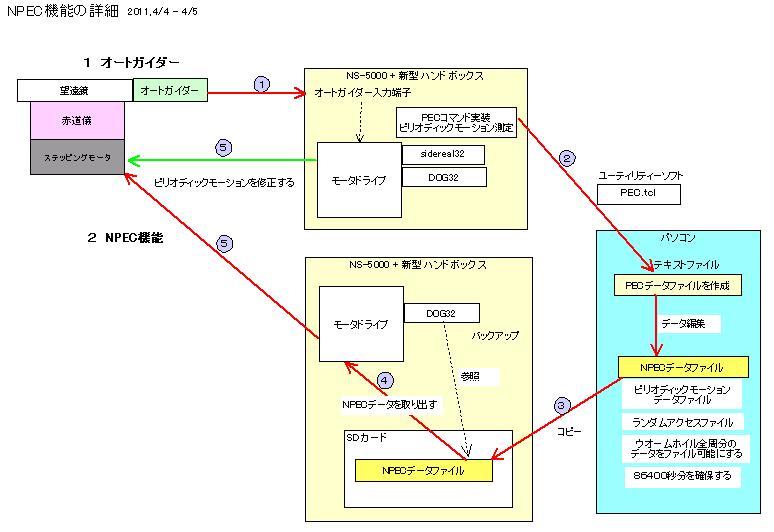
■NPEC機能について、図を使って補足説明をします。
一般的なオートガイダーは、ガイド端子 >モータドライブ>ステッピングモータ の経路でピリオディックモーションを修正しています。
図の①--->⑤の経路です。
それに対しNPECは、オートガイダー実行中にピリオディックモーションを同時に測定し、
パソコン上にNPECデータファイルを作り、それをSDカードにコピーしてピリオディックモーションを修正します。
つまり、図の①--->②--->③--->④--->⑤の経路で、ピリオディックモーションを修正しようと計画しています。
これは、空間的、時間的に離れていますが、オートガイダー==NPEC ではないか?とイメージしています。(== ほぼ等価という意味)
もしも、理屈どおりに動作すれば、オートガイダーが無くても、ほぼ同じレベルの追尾精度が実現できる可能性があります。
果たして、どの様な結果が出るか?今から興味津々です。
ご意見ご希望など、何でも結構です、メールをいただけますと大変助かります。
(2011,4/3)
■PECデータ(ピリオディックモーション)を収集するPECコマンドを実装しました。
また、PECデータファイルを作成するためのユーティリティソフト(PEC.tcl)を作りました。
これにより赤道儀のピリオディックモーションを数値データとして取り出し、テキストファイルとして保存することができます。
近日、DOG NS-5000 Ver4.18
バージョンアッププログラムを公開する予定です。
PECデータを収集する場合は、DOG NS-5000を初期設定して自動導入ができる状態にしてから、手動、またはオートガイドを始めます。
そして、ガイド中にパソコン側で PEC.tcl
を実行すると、PECデータファイルが自動生成されます。
; PECコマンド (2011,3/27)
;
; PECデータ収集機能を提供する (Timer5 Interrupt)
;
; :=pr# PECリセットコマンド
; :=pd# PECデータコマンド
;
;#:=pd# アンサ 16進
;timer sidereal32 DOG32#
;001D 00194DD4 00194DD4#
;
これはPECデータ参考例です。テスト用に作ったものです。(2011,3/10)を参考にしてください)
データは、カンマで区切っていますので、Excelで読み込んだり、スクリプト言語(Perl.Ruby,Tcl/Tk・・)で処理ができるでしょう。
データは、Timer,sidereal32,DOG32,PE,PE"の順番で並んでいます。データは10進数です。
PEは、PE=sidereal32-DOG32であり、PE"は、ピリオディックモーション(PE)のズレを角度(arcsec)で表しています。
例
10,1650274,1650302,-28,-21.875
このPECデータは、収集開始から10秒経過後に、DOG32=1650302の位置において、-21.875"
遅れていることを示しています。
従ってこのPE"をグラフ化すれば、正確なピリオディックモーション(PE)の状態を見ることができるでしょう。
また、その場合の精度はガイド精度とほぼ同じになります。
DOG32は赤経の回転角度を表しています。この値(角度、位置)から赤経値を計算して天体自動導入を実現しています。
従って、DOGはDOG32で表される位置(角度)を認識していますので、PECデータがどの位置のものか正確に特定できます。
この部分が、一般的なPEC機能と違っています。
下図は、検討中のピリオディックモーション修正駆動の概要です。
DOGがPECデータの位置を特定でできると言うことは、ウオームギアの歯(数)のひとつひとつも認識できるということです。
つまり、EM200赤道儀なら、ウオームギア 180:1ですから、180個の中周期のピリオディックモーション(PE)を識別できます。
一般的なPEC機能 と 検討中のピリオディックモーション修正駆動を比較すると、
1 一般的なPEC機能は、ある中周期一回分のガイド(モータドライブキー操作)を記録して、
それに続く、ピリオディックモーションを補正しようとしています。
2 検討中のピリオディックモーション修正駆動は、例えば中周期46番なら、46番のPECデータで修正します。
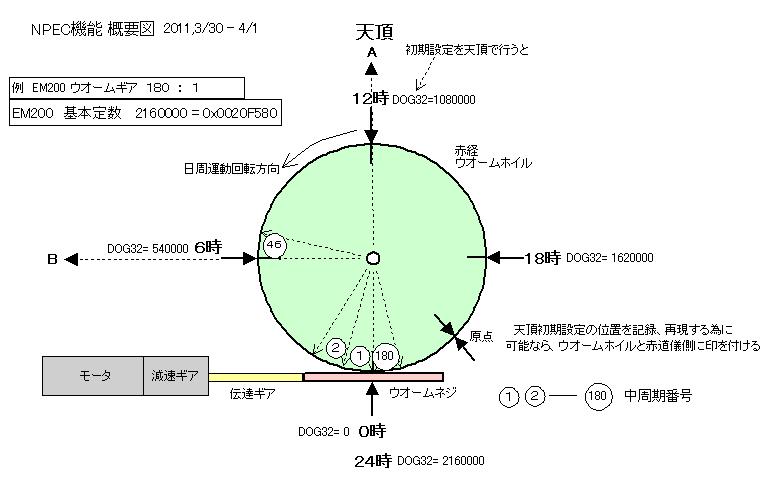
図のウオームホイルは、中心の向こうに天の北極が見えると考えて下さい。
概要図は、DOGを天頂に向けて初期設定をした場合を想定しています。たまたま子午線が12時であれば、DOG32は図の様に定義されます。
この状態でPECデータを、A点(DOG32=1080000)からB点(DOG32=540000)まで収集する場合、少なくとも6時間のオートガイドが必要になります。6時間後、再びA点に移動(自動導入)すると、赤経は12時ではなく18時以上に変化していますが DOG32=1080000 のままになっています。つまり、DOG32の定義は、初期設定後は変化しないように作ってあります。
PECデータを継続的に利用するには、この仕組は好都合です。
例えば、天頂で初期設定して、終了時は再び天頂に戻しておけば(パーク)、DOG32の定義とPECデータの関係は変化しません。
つまり、PECデータを継続的に再利用できるようになります。
もう一つの方法として、DOG32に対応するPECデータの位置(ポインタ)をバッテリバックアップしておけば、電源をOFFにしても記憶されています。
バックアップしている間は、DOG32の定義とPECデータの関係が維持され、PECデータを継続的に再利用できると思います。
もしも終了時に天頂以外で電源を切ったり、バックアップに失敗したら、PECデータとピリオディックモーションの関係が不明になるので、データは使えなくなります。そこで念のため、ウオームホイルと赤道儀に印を付けておけば安心です。いつでも復旧が可能になるでしょう。
以上の検討中のピリオディックモーション修正駆動は、一般的なPECと異なる発想と方法で実行しますので、今後はNPECと呼んで区別することにします。

■DOG NS-500NJP >> NS-5000PK264A2NJP
グレードアップのご注文を頂きました。
写真左はグレードアップで下取りしたNS-500NJPとPX243モータユニットです。(とても良好な状態です)
これをDOG NS-5000PX243NJP Ver4.18 最新バージョンに改造し、販売する予定です。
ご検討中のお客様はお問合せ下さい。サービスとしてオプションを追加して、お見積りいたします。
右は、ほぼ製作が完了しているNS-5000ATLUXです。発送しました。
■DOG NS-200/500グレードアップを予定しています。後日ご案内します。
時々NS-200/500(NS-201/501ではありません)をお持ちのお客様から、最新のNS-5000にグレードアップできないかお問合せを頂いていました。販売から時間も経ちましたので、近いうちにグレードアップのご案内をさせて頂きます。
それから、旧型の DOG NS-2/3/4
につきましては、製造、販売から20年近くになり、一応の区切りとして今月一杯でグレードアップを終了する予定です。それ以降は、ご希望があれば下取りで対応いたします。
それから、NS-2/3/4のカレンダはズレますが、西暦2011年を2001年で登録すれば問題なく自動導入ができます。
(2011,3/10)
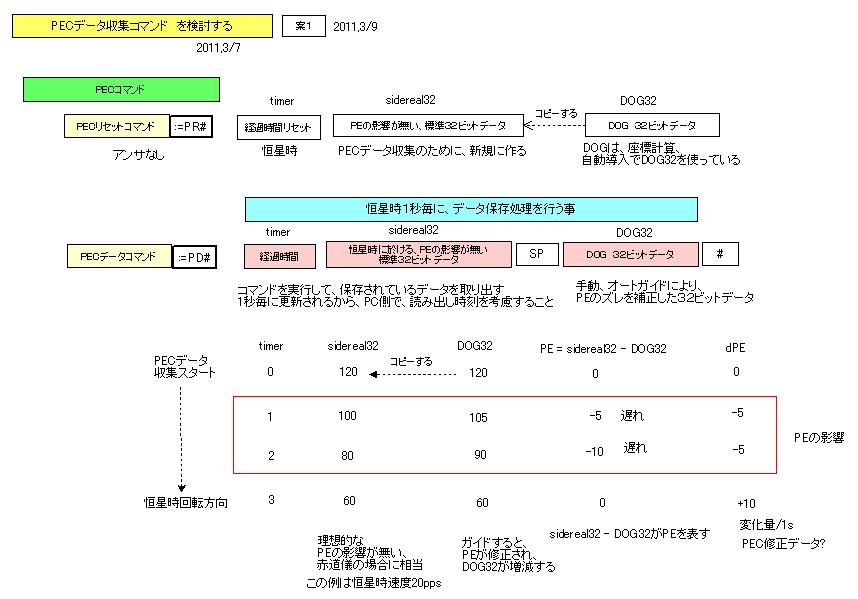
■PECデータを収集できないか検討しています。
SDカードのPECデータファイル(2011,2/14)と関係しますが、赤道儀から正確なピリオディックモーションデータ(PECデータ)を取り出すコマンドを作り、各種赤道儀ごとにPECデータを収集、検討すれば、PEC機能の開発に役立つと思いました。
以下のPECコマンドを考えました。あと少しで完成すると思います。
図のDOG32は、赤経値を決める基本的な32ビットデータで、モータが1ステップ回転すると、方向により+1あるいは-1します。
DOG32は、高速、低速、自動導入により、次々に変化し、赤経値が更新されます。
また、手動ガイドあるいはオートガイドをしても、ピリオディックモーション(PE)の影響によりDOG32が変化していくはずです。
そこで、このDOG32とPEの影響が無い32ビットデータsidereal32を作ることが出来れば、その差を計算し、PEを求めることができます。
(PEの影響が無い32ビットデータとは、簡単です、普通の恒星時速度で回転する32ビットデータのことです)
図の PE=sidereal32-DOG32 はピリオディックモーションによるズレを表しています。
この場合モータのステップ数ですから、1ステップ角の精度でピリオディックモーションを測定することができます。
赤道儀ごとの1ステップ角度は次のとおりです。
NS-5000EM200 1/2分割 0.6"
NS-5000GP 1/2分割 0.78125"
NS-5000PK264 1/16分割 0.1171875"
NS-5000ATLUX 1/16分割 0.0421875"
PECコマンドが完成しましたら、DOG NS-5000 Ver4.18 バージョンアッププログラムとして公開します。
(2011,2/25)
■DOG NS-5000 Ver4.17 バージョンアッププログラムを公開します。
NS-5000用です。ご利用ください。
バージョンアップの前に、DOG_BACKUP2.tclで復元用初期化データファイルを作成してから行って下さい。
初めにこちらをお読み下さい。
DOG_NS-5000_V4_17_2_25_11.lzh
それから、23日のプログラムですが、スピードテーブル用基本クロックの違い(250KHz,
2MHz)について考慮するのを忘れていました。
修正済みプログラムを用意しましたので、こちらと差し替えてご利用ください。
DOG_BACKUP2.tcl
バージョンアッププログラムについて、ご意見、ご感想のメールを頂ければ大変参考になります。よろしくお願いします。
お気づきの点がありましたらお知らせ下さい。
(2011,2/23)
■DOGユーティリティープログラムを改良しました。
復元用の初期化データ作成プログラムをバージョンアップしました。
最新のDOG NS-5000 Ver4.17まで対応しています。
ご利用ください。実行すると、以下の二つのファイルを作成します。
1 DOG_設定情報_xxx 設定情報 (初期化データの詳しい内容) 参考例 DOG_setteijyohou_02_23_11.txt
2 DOG_renew_xxx 復元用初期化データ (元の状態に簡単に初期化できます) 参考例 DOG_renew_02_23_11.txt
スピードデータ、基本定数、バックラッシュ・・など各種パラメータも初期化されます。
DOG_BACKUP2.tcl
新しく二つのコマンドに対応するようになりました。
off timerは最新のコマンドです。
また、スピードデータは、データごとに**倍速と表示しましたので分かりやすくなったと思います。
;
; スピードテーブル用 クロックを確認、変更する
(2010,2/13)
;
; :=TCLK# クロックを確認、変更する <<続けてNEWコマンドを実行すること、次回から有効になる
;
; スピード・クロック番号
; 3 :=TCLK3# 62.5KHz
; 2 :=TCLK2# 250KHz
; 1 :=TCLK1# 2MHz
; 0 :=TCLK0# 16MHz 使用禁止
;
; shutdown時間 (off timer時間) を確認、変更する
(2011,2/1)
;
; :=DTx# shutdownコマンド
;
; shutdown番号
; 3 :=DT3# 3時間
; 2 :=DT2# 2時間
; 1 :=DT1# 1時間
; 0 :=DT0# shutdown機能 無効 (出荷時は無効である)
;
お気づきの点がありましたらお知らせ下さい。お願いします。
(2011,2/21)
■RTCCモジュール(カレンダ、時計機能)の実験をしています。
今夜は、グラフィックLCD表示器、SDカードの次として、RTCCモジュールの実験をしていました。
プログラムの方は上手く動いて、年月日、時刻を参照できるようになりました。
RTCCの情報をもとにして、DOGの時計、地方恒星時を設定し、天体自動導入ができます。
実験としてNS-2000基板にボタン型のリチュウム電池(CR2032)を実装しました。
内蔵電池だけで少なくとも1年以上RTCCを動かしたいのですが、今日の実験では、バックアップ回路がうまく動いていません。
CR2032電池は、手軽に100均で購入できますが、容量は約200mA/hです。1年以上動かすには、かなり消費電流を減らす必要があります。
そこで、プログラムでCPUをスリープモードにすると、17.5uA(0.0000175アンペア)に消費電流が減るのですが、
電源OFF時にスリープモードに切り替えても、何故か?スリープモードになってくれません。(17.5uAではなく 1mA以上流れる)
原因は、ブラウンアウトリセットという、電源電圧の変動からCPUの動作を守る機能が影響?しているかも知れませんが、
今のところ原因が分かりません。解決に少し時間がかかりそうです。
消費電流が17.5uAだとすれば、CR2032電池だけで約1.3年(計算値)動きます。
NS-2000基板はリチュウム電池を実装できます。
(2011,2/14)
■お客様からオートガイダーVSTについてメールをいただきました。
ガイド星の等級に関する2件のレポートです。口径8cmガイド鏡で5等級、9cmで6等級でガイドができています。
どちらも昨年から改良を続けていた、組み込みタイプのVSTで、主にハードウエアの改造・改良を行っていました。
組み込みタイプVST Ver3.1は、従来の外付けタイプのVST Ver3をモデルにして、新しく設計、開発したものです。
CPUは、8ビットから16ビットに変更して小型化を実現し、モータドライブ、DOGへ組込みが可能になりました。
(2011/1/24)
昨晩NS-5000 VST のテストしました。
C11 に親がめ小亀で乗せた、スコープタウンの口径80mm焦点距離540mmをETL-2
にて二倍に伸ばして1080にWAT-502B をつけてガイドしました。
マウントは、旧アトラクス、ステラナビゲータ6
にてガイド星を導入しました。
結果は、カシオペア座あたりの2等星から順番に5等星までガイドできました。六等星は、画面にはしっかり確認できますがVST
が認識できませんでした。
写真はお客様のご依頼で組み込んだVST Ver3.1実装例です。左がNS-5000、右がNS-501です。
パネルにオートガイドスイッチとLEDランプを取り付けています。
左下の基板は、場違いですが、STM32 CPUボード(ARM
Cortex-M3)です。かなり強力なCPUで移植に使えそうです。

(2011/1/6)
6等級のガイド星で撮影した二重星団(h-χ)と使用ガイド星情報を
お送りします。情報として活用できるようでしたらお使い下さい。
撮影情報は
NGC884+869 (二重星団)
鏡筒 :Vixen VAISAC+F6.4レジューサ(f=1278mm)
カメラ :Nikon D90(ノーマル)+LPS-P2フィルタ ISO1600/5分
x 4
ガイド鏡 :Viper(90mm/f1200mm+Vixen
B05-3M+VST
架台 :JP赤道儀+NS-5000
撮影地 :群馬県伊勢崎市
ニックネームはニコニコ動画などでは「keigon_papa」を使っています。
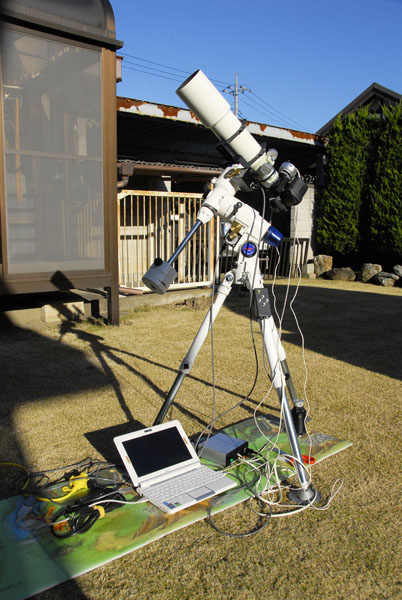
観測風景の写真もお使い下さい。
keigon_papa様は、NJPモータユニットの製作、テスト、VST改良で大変お世話になっております。
精密加工、電子工学関係のお仕事をされています。
 |
 |
 |
■SDメモリカードの続きです。
Petit FatFsの使い方はだいたい分かりました。
シーケンシャルファイル、ランダムアクセルファイルの生成、読み出しを確認しました。
また、手持ちの2GバイトマイクロSDカードも問題なく動作して、100Mバイトの大きなファイルもアクセスできました。
ファイルのREADは難しいところもなく快適ですが、WRITEは常にセクター(512バイト)単位、境界を考慮して手順を踏みながらアクセスする必要があり、少し手間がかかりますが、プログラミングで解決できるでしょう。
メモリカードの読み出し速度は、今後のプログラム設計に影響を与えますので、実測しました。
読み出しはセクター単位で、連続して行っています。
CPU PIC24FJ64GA002 32MHz
51KB-- 0.27秒
102KB -- 0.45秒
つまり188--226Kバイト/sec になりました。この結果は新型ハンドボックスおいて十分なスピードだと思います。
書き込みについては、用途が少なく、速度の影響もあまり受けないと思われますので、特に問題ないでしょう。
このSDカードに何を入れるか?それが問題ですが、以下を検討中です。
1 初期化データファイル、スピードテーブル・・・
2 バージョンアッププログラム
3 天体データファイル(メシエ、NGC,IC・・・)
4 フォントデータファイル(英数字記号、漢字、8*8美咲フォント,12*10ドット)
5 ログファイル
6 PECデータファイル
7 バッチファイル
ログファイル
初期設定時に自動的に作成して、自動導入、ガイド・・を実行する度に、その時刻、座標、内容を記録すれば、あとで役立つと思いました。
テキストファイルで作成しますので、観測後、PCでご覧いただくことができるでしょう。
PECデータファイル
SDカードを実装することで、ピリオディックモーション修正駆動(PEC)を実現できる可能性が生まれたと思っています。
PECは、最近のテーマでもなく、すでに20年前から議論があり、PEC機能を実装したモータドライブ(MEAD?)もありました。
また、当時DOG NS-4/12を開発している際に、実用性について、テストで確かめたことがあります。
PEC機能で補正しようとするピリオディックモーション(PE)は、大きく分けて長周期、中周期、短周期の3つあります。
一般的なPECは、中周期を対象にしており、例えばEM200赤道儀では赤経ウオームホイール歯数は180で、24時間/180=8分になります。
つまり8分(中周期)一回分のPEC修正データを準備して、それに続く、ピリオディックモーションを補正しようとしています。
しかし、これには前提があり、中周期ごとに繰り返すPEのパターンは同じと想定しています。
残念ながら、パターンは多少似ています?が、同じではありません。実際はかなり違っている場合があります。
また中周期のPEは、ウオームホイル1周、24時間ごとに繰り返す長周期のピリオディックモーション上で発生していますので、
長・中周期のPEが合成されています。
それから、短周期は、伝達ギア、モータの減速ギア等から複雑に発生しますので、PECで対処するのは難しいでしょう。
実際のPEに対して、ピリオディックモーション修正駆動(PEC)を実現するには、PEC修正データをどの様に準備し、どの様に修正駆動をするか?
それがPEC機能のカギだと思います。いくつか方法を検討しています。
バッチファイル
これはCP/M , MS-DOSの時代に良く使われていた方法ですが、あらかじめ複数の処理(プログラム)を一気に実行するために、
順番に処理内容をファイルに書いておきます。このバッチファイルを実行すると、内容に従って次々に実行(バッチ処理)していきます。
この発想はDOGでも使えそうです。
例えば、あらかじめ撮影計画を立て、天体導入、撮影(露出時間)、次の天体導入、撮影・・・・を書いたバッチファイルを用意しておきます。
現地で、このバッチファイルを実行すれば、あとは見ているだけで自動的に、天体自動導入、撮影・・・を行ってくれます。
手間がかからず効率の良い撮影が実現できそうです。これはプログラミングの問題ですから可能でしょう。
それから、新型ハンドボックスのハードとして、デジタルカメラ用のシャッター出力を、2チャンネル用意する計画です。
シャッターはプログラム、コマンドでコントロール可能にします。これは比較的簡単です。
ハードの方は、グラフィックLCD表示器やSDカード、ランプ、ブザー、シャッター2チャンネルは、ほぼ設計が終わっています。
ご意見ご希望など、何でも結構です、メールをいただけますと大変助かります。
(2011,2/5)
■SDメモリカードを動かす事ができました。
3日にSDカード実験回路を作り4日にテストをしましたが、直ぐに動きました。
今回は、SDカードコントロールのためにのPetit FatFsというプログラムを利用させて頂きました。素晴らしいソフトです。
回路とプログラムは、公開されているSample
projects で行いました。
NS-2000基板でテストをするため、一部回路(クロック、UART)と通信速度を9600bpsに変更しました。
テストではファイルのオープン、読み出し、書き込みなど一連の動作を確認しました。
次は、いろいろとプログラミングの実験をしながら、特にPetit
FatFsのアクセススピードを確認して、今後の開発を検討したいと思っています。
(2011,2/2)
■OFFタイマー機能をNS-5000に組込みました。
先日(2011,1/23)のOFFタイマーですが、プログラミングが終わりNS-5000に内蔵することができました。
これをVer4.17にします。チェックを済ませてから、近日、バージョンアッププログラムを公開する予定です。
最後に望遠鏡を操作してから、所定の時間が経過すると、自動的に恒星時駆動が停止し、シャットダウン状態になります。
再開する場合は、ハンドボックスを操作、自動導入を開始すると、自動的に復旧します。
シャットダウン状態でも赤経、赤緯の更新が行われていますので、直ちに自動導入ができます。
NEWコマンドでシャットダウンの設定を保存します。
; 所定の時間が経過すると、自動的に、恒星時駆動を止める
; 望遠鏡の衝突回避に役立つ
;
; shutdown (off timer) コマンド (2011,2/1)
;
; shutdown時間 (off timer時間) を確認、変更する
;
; :=DTx# shutdownコマンド
;
; #:=DT3# 3時間
; #:=DT2# 2時間
; #:=DT1# 1時間
; #:=DT0# shutdown機能 無効 (出荷時は無効である)
#:=DT# 確認
3
(2011,1/30)
■漢字テキストを表示できました。
Windowsのテキスト(シフトJISコード)をLCD表示するプログラムを作りました。
これにより取扱説明書とかメールを表示できます。
8*8ドット(美咲フォント)で表示された文字ですが、漢字だけを見ると、少々判読が難しいものがありますが、文章の中にいれると、
不思議と前後の文脈のおかげで、それなりにスムーズに読むことができました。大変工夫されたフォントだと感心しました。
フォントデータのサイズが大きいので、使用頻度の少ない文字を削除して、データサイズを圧縮し、約30KBに収めました。
他に見やすさを考えて、数字のみ12*10ドットのフォントを用意しました。
収録漢字コード (16進数、シフトJISコード)
半角文字
英数字記号 20 --- 7E
半角カタカナは削除。
字幅は全角と同じです。
全角文字
英数字記号など 8140 --- 83D6
機種依存文字と使用頻度の少ない文字、記号を削除。
第一水準漢字 889F --- 9872
第二水準漢字は削除。
 |
 |
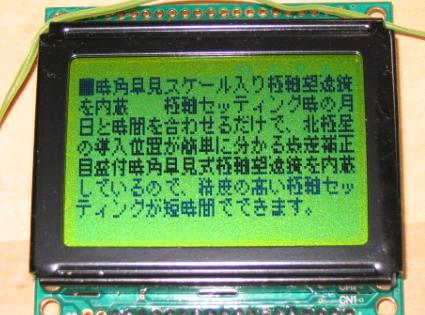
■時角早見スケール入り極軸望遠鏡を内蔵
極軸セッティング時の月日と時間を合わせるだけで、北極星の導入位置が簡単に分かる歳差補正目盛付時角早見式極軸望遠鏡を
内蔵しているので、精度の高い極軸セッティングが短時間でできます。 (タカハシのサイトより)
(2011,1/23)
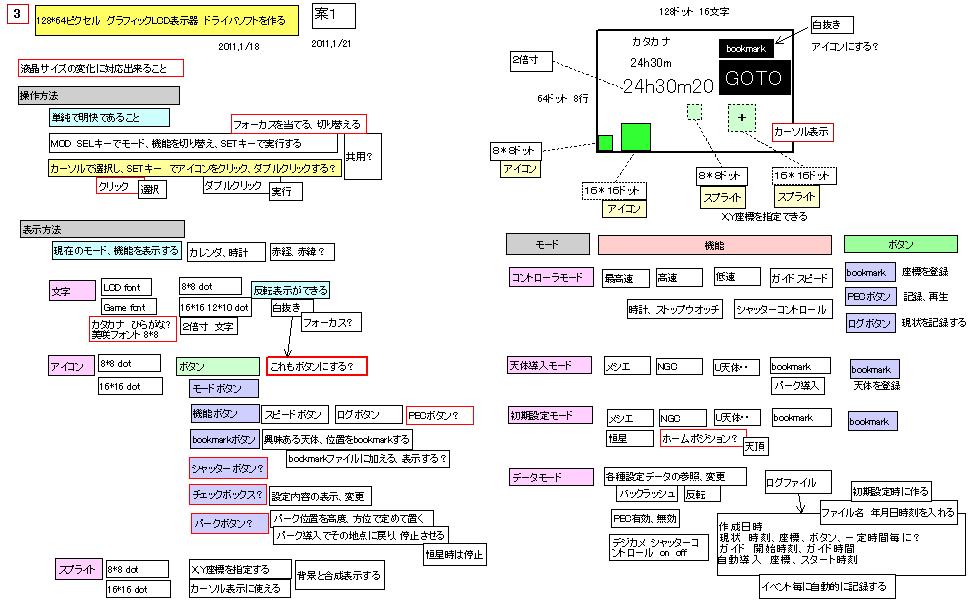
■新型ハンドボックス用 LCD表示器ドライバソフトを作っています。
キャラクタ型LCD表示器は完成しました。また、グラフィック用については、いろいろ検討していますが、
今日の段階で基本的な表示プログラムが動くようになり、一安心しています。
後は、ほぼプログラミングの問題になると思います。
ご意見ご希望など、メールをいただけますと大変助かります。
■キャラクタ型 LCD表示器でメッセージを表示してみました。
基板はNS-2000を利用しました。
■今日、128*64ピクセル グラフィック型 LCD表示器が動きだしました。
まだ自由に文字を表示できない状態ですが、試しに直接フォントデータを書きこんでみました。
ご覧のように綺麗に表示されました。美咲フォントという8*8ドット日本語フォントを利用させていただきました。
マイコンのメモリ内に作った仮想的なキャンバス(LCDと同じ128*64ピクセル)の内容を、そのままLCDに表示するプログラムです。これはドライバソフトの基本的な仕組みになります。
次は、キャンバス上に文字やアイコンを描画するプログラムを作り、更に、その上にスプライトを合成表示したいと思っています。
それから、8*8ドットの美咲フォントで漢字表示ができそうです。
先日お客様から以下のご要望をいただきました。
> 2、日本語表示
> これはLCDドライバソフトが大変かと思いますが、カタカナやひらがな
> だけでも対応していると助かります。
そこで、さっそく調べたところ、8*8ドットで美咲フォントというものがあり、英数字記号などの他に、なんとJIS第一・第二水準の漢字までサポートしているというのです。まさか、と思いましたが本当でした。どの様に漢字が表示されるか、今から楽しみです。あとでご紹介します。
 |
 |
■DOG NS-5000 旧アトラクス用のお客様からメールを頂きました。
他のお客様にも参考になると思いますので、ご紹介します。
NS-5000は年末に送ったので正月に到着してしまいました。
お客様のNS-5000は特別仕様になっています。
DOG NS-5000ATLUX Ver4.16 (旧アトラクス用) 電源
:12V----36V対応、モータ最大2A出力可能
マイクロステップ切替
赤経カレントダウン調整ボリューム
オートガイダー入力端子はAGA-1互換です。
(2011,1/17)
状況報告を致します。
本日(休みを取って)PC→NS-5000→ATLUXの総合接続に成功しました。
PC :SONY VAIO-P
Soft :ステラナビゲータ V9
IFソフト:ASCOM(Skycenser2000PC)
ポート:ELECOM UC-SGT
実は結構大変でした。でもほとんどがPC側の設定です。
1.COMポートがうまく認識しない(ポートエラー発生、COM1がオープンできない、認識しない)
→よくわからないが、ポート番号を変えたりすると復活します。
2.DOG_TERMINALで高速版36V NS5000ATLUX_初期化データ_2送信成功
3.NS500_HIGH_SPEED 動作OK(電源36V)
4.ASCOM導入成功
5.ステラナビゲータからのコントロール成功
6.ATLUXのイルミネーションは電源接続でうまくいきました。
(ご指摘ありがとうございます)
ここまで色々試行しておりましたが、私が理解していないことが問題かと
感じております。参考になったのは、フルーツ&スカイさんのNS-5000とステラナビVer.9での自動導入
です。
実は実際に星を追いかけておりません。。近いうちにテストしたいと思います。
最高速度は200倍で動作しているようです。脱調していないと思いますが星で実践してみないと解りません。
(250倍は良好かよくわかりませんでしたが、脱調音ってよくわかりませんがきれいな高音がなって動いてます)
今後の対応項目
1.実践(星を自動導入する)
バックラッシなども調整する
2.オートガイドを構築する(AGA1)
3.オートガイドを確認する
4.写真撮影
色々質問したくなることもありますが、まだ勘違いも多く解決しておりますので整理して
ご相談したいと思います。
以上、連絡いたします。
引き続き、よろしくお願い申し上げます。
P.S.ATLUXがNS-5000にて200倍で動いたときと、NS-5000とステラナビVer.9での自動導入が動いたときは
大変感動しました。これで ATLUXもまだまだ現役で働いてくれそうです。NS-5000に感謝です。
先日、フルーツ&スカイさんのブログを見たところ、OFFタイマーの記事がありました。
とても便利な機械だと思いましたので、NS-5000Ver4.17のバージョンアップで実現できないか検討しています。
上手く行ったら、バージョンアッププログラムを公開します。
(2011,1/10)
明けましておめでとうございます。
今年もよろしくお願いします。
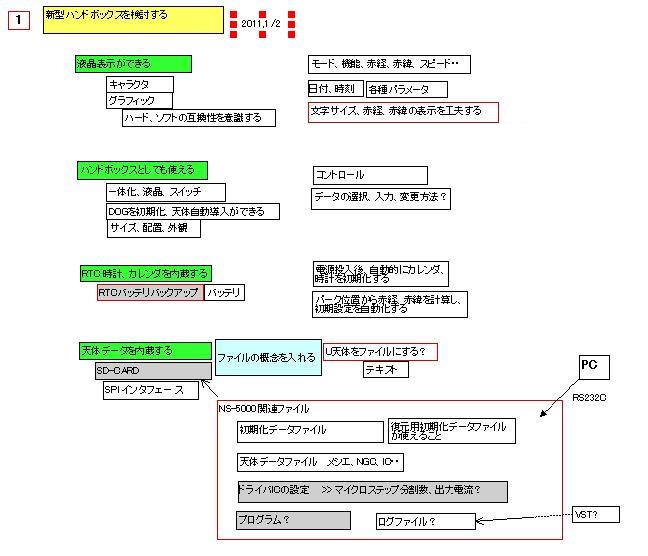
■2011年の目標を立てました。
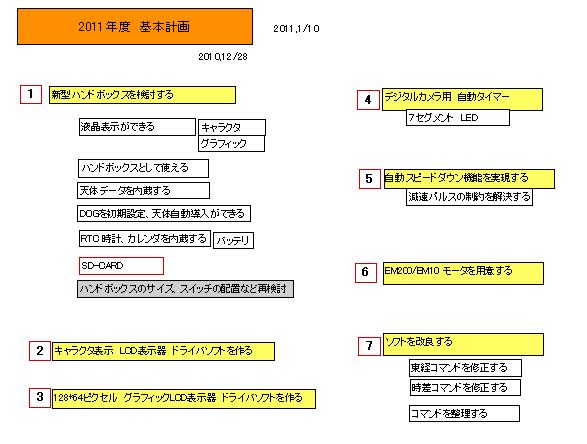
一番の目標は新型ハンドボックスを作ることです。これが完成すれば、DOGはパソコンが無くても天体自動導入ができるようになります。
2,3のLCD表示器はハンドボックスと関連しますが、今後の製品開発に役立つでしょう。
4は、お客様からご依頼を頂いていたものですが、昨年は殆んど進展しませんでした。お客様には大変お待たせしております。
ハンドボックスで扱うPIC24F256で対応が可能になりますのでもう暫くお待ち下さい。
ハンドボックスの仕様を検討しています。
ご意見ご希望などありましたら何でも結構ですから、メールをいただけますと大変参考になります。
参考図はこれまでiEditというソフトで作成してきましたが、これからはDynamic Drawで作ります。素晴らしいソフトです。
少しですが回路設計を進めました。
お客様からのご要望でSDメモリカードを内蔵する予定です。
例えば、1天体データを32バイトと仮定すれば、写真の8MBのSDカード1枚で、20万以上の天体を登録できます。
そんなに大量の天体を入れてもしょうがないと思っていますが、8MBカードは100円足らずで購入できます。
■四国香川県のお客様から写真を送っていただきました。
立派な赤道儀です。
DOG NS-5000+NJP赤道儀にNS-4/12用のハイブリッドモータを取り付けています。
高速用 >> PX243G01-01A トルク8kgcm 電流0.6A/相 電圧4V
巻線抵抗6.7Ω/相

このホームページで公開するハードウエアー、ソフトウエアーなどの情報、
データ、その改造、応用したものの公開や営利目的の販売などをお断りします。
[HOME]

