| 新型 天体自動導入装置
DOG NS-2000/5000 開発中 |
(2009,11/19)
■NS-200/500からNS-201/501へバージョンアップを行います。
基本的な機能はほぼ同じですがスピードはかなり速くなります。
GP,SP/DXでは、約80 から 140-180倍速にスピードアップしています。(電源は24Vの場合です)
ご希望があれば、グレードアップ、オートガイダーVST
Ver3.1実装も可能です。お見積もりいたします。
バージョンアップ、グレードアップは、基本的にCPUボードの交換だけですが、スペースの都合でケースも交換する場合があります。
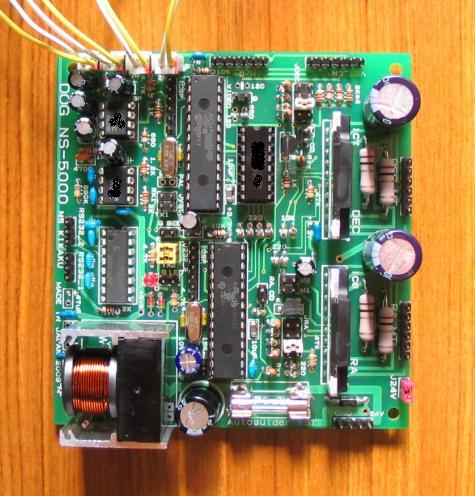
製作中のDOG NS-5000
■NS-501 EM200 ,EM10バージョンアップにつきましては、現在モータメーカに問い合わせして、
高速ステッピングモータの選定を進めています。
NS-501/5000EM200では200倍速以上を目標にしています。
新しいモータは純正モータと同じメーカの同型、同寸法、同トルク以上のモータです。
詳しくは、お問い合わせください。お見積もりできます。
■新しくNS-501/5000NJPを作ります。EM200と同様に専用モータを選ぶ予定です。
モータが決まるまで暫くお待ちください。それからNS-100NJPグレードアップもご案内できると思います。
これも純正モータ交換だけで高速駆動を目標にしています。
■今後も引き続きNS-5000の改良を進める予定です。
(2009,10/30)
NS-201では高速ドライバをオプションにする予定でしたが、作業が複雑になりすぎるため、
標準装備にすることにしました。
(2009,10/28)
■NS-5000 CPUボードを使って、現行のNS-200,NS-500
をそれぞれNS-201,NS-501に変更します。
いずれも互換性があり同じ操作方法、同じ機能ですが、一部仕様が違っています。
重大な違いは電源電圧です、NS-201/501は最大24Vまで対応できるようになりました。
ご使用の際は電源電圧に注意してください。
NS-200/500
NS-201/501
電源電圧
12V
12―24V
高速ドライバ
定電圧ユニポーラ駆動
定電流ユニポーラ駆動
最高速度(GP赤道儀)
約80倍速(12V)
約90倍速(12V)約140-180倍速(24V)
(2009,10/25)
■新しい NS-5000 CPUボードは、NS-100/200/500と上位互換性があります。
導入速度、オートガイダーVST実装、ASCOM 2チャンネル対応・・・など大幅に機能アップしました。
そこで現行機種をこのCPUボードを使って、バージョンアップします。
■旧アトラクスNS-5000用 マイクロステップ初期化データを用意しました。
ダウンロードしてご利用ください。
NS5000ATLUX_syokika_2.lzh
1/2分割 スピードデータ+基本定数
NS5000ATLUX_syokika_4.lzh
1/4
NS5000ATLUX_syokika_8.lzh
1/8
NS5000ATLUX_syokika_16.lzh
1/16
(2009,10/23)
■10/21に地方恒星時(時計)を1時間進める方法について説明しましたが、観測地の経度を修正しても実現できます。
例えば、観測地経度が135度なら、仮に150度にすると地方恒星時は1時間進みます。こちらの方が簡単かも知れないです。
■DOG NS-5000PK243A1を作りました。
正面

左から
電源スイッチ、赤経カレントダウン調整ボリューム、オートガイド端子(LX200互換)、オートガイダーVSTスイッチ、ハンドボックス用コネクタ
ランプ左から DOGランプ 、 オートガイダーVSTランプ
背面

左側の黄色端子は、オートガイダーVSTビデオ入力端子、下が出力端子です。
今回は、赤道儀切替スイッチは実装していません。
(2009,10/21)
■旧アトラクス用DOG NS-5000をご利用いただいているお客様からご質問のメール(10月12日)をいただきました。
今日はそれについて説明します。
ご質問ごとに説明を入れました。
「西岡様
お気遣いありがとうございます。その後の報告です。
THE SKYのほうは、置いておいて、Cartes du Ciel をインス
トールして試みると、ドンぴしゃり!
この導入精度の高さは感動ものです。
Cartes du Ciel自体、フリーとは思えないほど使い勝手がよく
、常用星図ソフトになりそうです。
さて、では遠慮なく質問を何点か。
まだ十分使っていません。試していない部分がありますので、
間抜けな質問もあると思います。
①子午線越えの自動導入では、テレスコープイースト=ウェス
トが入れ替わるようになっているようです。気長に眺めれば、
面白い光景ではありますが、子午線から15度程度ならばイース
ト=ウェスト入れ替えなしで使いたいものです。可能でしょう
か。
可能です。地方恒星時(時計)を1時間(15度)進めると(増やす)、子午線の位置は見かけ上東側に15度傾きますので、西側で初期設定(同期)すればご希望の操作が可能になるでしょう。ただし、望遠鏡が三脚と衝突する危険性がありますので、十分注意してください。地方恒星時を元に戻す場合は、時計を初期設定してください、自動的に恒星時が再初期化されます。
地方恒星時の確認、初期化(増やす)したい場合は、DOG
NS-200/500 観測地情報をご利用ください。
以下のコマンドで地方恒星時を初期化できます。
#:SSHH:MM:SS# Sets
the local sideral time to HH:MM:SS
DOGは本体に地方恒星時時計を内蔵していますので正確な子午線の位置が分かります。
そのため、特定の天体で初期設定(同期)あるいは自動導入をする場合、計算により、
自動的にその天体が東側、西側どちらにあるか判断できます。
従って、ユーザーに目標天体がテレスコープイースト=ウェストであるかサポートを頂く必要がありません。
地方恒星時時計を持たない天体自動導入装置、導入支援機器(エンコーダ方式など)は、
初期設定する場合、ユーザーがテレスコープイースト=ウェスト(あるいはバランス・ウエイトが東、西という場合もあるようです)を指示したり、また目標天体が子午線の向こうにある場合は、テレスコープイースト=ウェスト、あるいはスイッチなどで反転導入を指示する必要がでてきます。
NS-300/500/5000は以上の様な指示は必要ありません。(LX200,SS2000なども同様だと思います)
DOGナビゲータNS-300はエンコーダ方式による手動導入ですが、原理は同じです、
テレスコープイースト=ウェストなどは考慮する必要性はありません。
②追尾モードでの子午線越え、まだ試していませんが、子午線
で自動的に入れ替えが行われるのでしょうか。行われず継続観
測できることを祈っています。
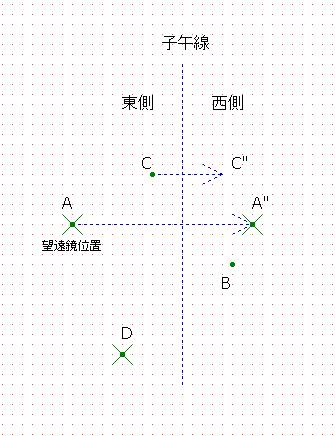
DOGは子午線を越えても自動反転しません。継続観測ができます。図で説明します。
例えば、望遠鏡がAに向いており、日周運動によりA”に移動した場合、
目標天体の位置により自動導入は以下のようになります。
A”から、C、Dを自動導入する場合は、東側に戻って自動導入します。
A”から、Bを自動導入する場合、Bは西側にありますので反転し自動導入します。
反転しないでBを導入したい場合は、星図ソフトを見ながら手動導入してください。
また、望遠鏡がDにありCを自動導入する場合、導入に時間がかかり、C”の位置に移動してしまう可能性があります。この場合、DOGは反転せずに子午線を超えてC”を自動導入します。
DOGが反転するかしないかは、自動導入開始時に目標天体の位置で判断しています。
つまり、子午線(地方恒星時)を基準にして東、西側を判断しており、目標天体が子午線の向こうにある場合は反転してから自動導入します。その判断は自動導入開始時に一度だけ行われます。
③星図ソフトでの自動導入、ある天体で同期させればあとは次
の天体との天球上での位置関係で導入できそうなものですが、
観測地の緯度経度、それと時刻の設定はプログラム上、どのよ
うな役割をしているのでしょうか。実はこれまで使用していた
自動導入装置では、星図ソフトから使う場合でも、スタンドア
ロンで使う場合でも、緯度経度、時刻の設定は不要でした。
観測地の緯度経度、時刻の設定などは、基本的に地方恒星時の計算に使用しています。
観測地情報がなければ、地方恒星時の算出はできません。
従って、これらの情報を必要としない導入装置は、子午線の位置が分からないので、
次のようなサポートをしないと初期設定、子午線越えの自動導入ができないでしょう。
1 テレスコープイースト=ウェスト、あるいはスイッチなどで反転導入を指示する
2 初期設定、自動導入のたびに地方恒星時を提供する
以上の他に、基本的な赤経、赤緯、さらに地方恒星時などの機能、概念を持たず、
基礎的な赤経と赤緯のパルスを管理しているだけの、天体用に特化したモータドライバに近いものもあります。
この場合は、初期設定、自動導入などの機能はパソコン側で全面的にサポートする必要があるでしょう。
④これまで使ってきた駆動装置は16分割で音がやさしいもので
したので、16分割で動かしてみたいとおもいます。ケースに
あるスイッチの切り替えだけでできるものでしょうか。それと
も基本定数を設定しなおさなければならないものでしょうか。
試さずに質問することをお許しください。
マイクロステップ切替スイッチで16分割にできますが、
あわせて16分割用のスピードテーブルと基本定数を初期化していただく必要があります。
現状では、ハイパーターミナルか、あるいはお客様が作成された旧アトラクス用ソフトで初期化できます。
今後専用のアプリケーションソフトを作る予定です。
⑤興味本位の質問ですみません。
自動導入するのに、離れた天体ほど時間がかかりますが、その
間の自転による移動も補正されていますか。導入精度がすばら
しかったものですから。」
DOGは、自転による移動を正確に補正できます。
DOGは、赤経1秒、赤緯15秒角単位で、初期設定(同期)、自動導入完了を判断しています。
座標はDOGのステッピングモータのパルスと連動する32ビットデータから算出しています。
動作テストで、高速自動導入、正転、逆転を数時間繰り返しても、32ビットデータに誤差が出ないことを確認しています。
自転による移動を補正するといっても、システム設計するプログラマによって、いろいろな方法があると思います。
この辺は、ノウハウに当たる部分ですので、ごく簡単に自動導入について説明しますと、
1 自動導入は、両軸駆動により、最短時間、最高速度で実行します。
2 目標天体の座標に15秒角の範囲に入った時点で導入完了します。
3 目標天体の移動に合わせて少しずつ移動方向を修正しながら、目標天体に向かっていき、
最後に目標天体と交差するようになって、自動導入完了となります。
(2009,10/20)
■NS-5000に、キー入力コマンド、リブートコマンドを追加しました。
; キー入力コマンド
(2009,10/19)
;
; :=KI# キー入力 状態を確認する(電源投入後は必ず有効になる)
;
0:入力無効 ハンドボックス、オートガイド入力は無効
;
1: 有効
; :=KIx# x:0無効 x:1有効にする
; リブートコマンド
(2009,10/20)
;
; :=R# 再起動する
■NS-5000のデザインを決めました。
当面はこのような外観で製作する予定です。
CPUボードはNS-5000PK243A1用で、ドライバICに放熱板を取り付けています。
ステッピングモータに換装されたNEWアトラクス赤道儀用(2009,7/7
, 7/8)として製作しました。
ケースも決まり、やるべき事もやったように思います。近日中に出荷します。
デザインその他は今後改良により予告なく変更する場合があります。
(2009,10/11)
NS-5000 CPUボードは、DOG,VSTともに順調に動いています。
ノーミスだと思っていましたが、残念ながら一箇所見つかりました、幸いパターンカット1つで解決しました。
SP赤道儀を使って、12Vで90倍速、24Vでは180倍速で駆動できました。
VSTは、まだテストが不十分ですが、正常にガイド星の検出、学習、オートガイドができています。
NS-5000に実装したオートガイダーは、今回はパソコンに対応しません。当初は Ver5 を予定していましたが、
番号が飛び分りづらくなりますので、Ver 3.1
とすることに決めました。
また、オートガイダーとしての機能はVer3 と同じですが、以下の中央、中心付近のサイズを変更しました。
とくに中央付近を大きく取りましたので将来役立つ事があるでしょう。
 VSTの中央付近と中心付近の大きさは以下のとおりです。
VSTの中央付近と中心付近の大きさは以下のとおりです。
中央付近 中心付近
Ver 2,3 100×100 16×16
Ver 4.1 160×120 16×12
Ver 3.1 180×180 16×12
■NS-5000 オートガイド端子の働きについて
オートガイド端子は、ハンドボックス、VSTオートガイド出力と並列に接続されています。図をご覧ください。
これにより以下が可能になります。オートガイド端子はオプションです。
1 例えば、他社製オートガイダー(ST-4など)をオートガイド端子に接続した場合、オートガイド信号はNS-5000に入力されオートガイドができます。また、オートガイダーVSTを動作させた場合も、やはりオートガイド信号はNS-500に入力されオートガイドすることができます。
外部のオートガイダーとVSTの出力が並列になっていますが何ら影響はありません。
2 NS-5000はオートガイダーVSTとして、ご利用いただく事が可能です。
オートガイダーVSTを動作させた場合、オートガイド信号は、NS-5000に入力される他に、オートガイド端子に出力されます。つまり、端子にモータードライブを接続すれば、オートガイドすることが可能になります。
NS-5000をオートガイダーとしてご利用いただく場合は、モータケーブルを赤道儀につなぐ必要はありません。
オートガイド端子は、入力の場合はLX200互換となり、出力の場合はオープンコレクタとなります。
3 それから、図の「入力無効スイッチ」を作る予定です。これは本物のスイッチではなく、論理的なスイッチで、
パソコンからコマンドによりON/OFFできるものです。近日中に作ります。
「入力無効スイッチ」をOFFにできれば、DOGとVSTは完全に独立して動くようになります。
つまり、オートガイド端子、VSTオートガイド出力の影響を受けないようにできます。
従って、次のようなことが可能になります。
アトラクス赤道儀をTheSkyで天体自動導入しながら他の赤道儀をオートガイドすることが可能になるでしょう。
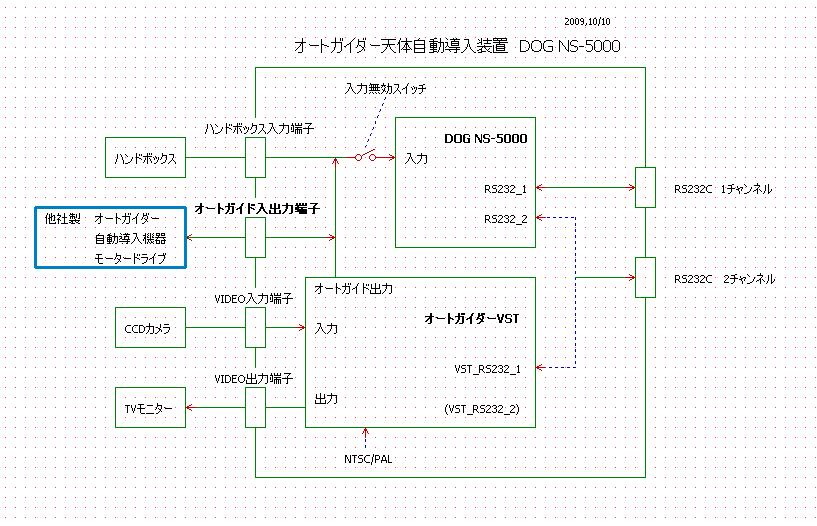
オートガイダー天体自動導入装置DOG NS-5000 オートガイド端子とRS232C概要図
(2009,10/7)
基板チェックの結果、心配していたパターンミスはありませんでした。
一部入荷待ちの部品がありますが一通り全部実装しました。この状態で、オートガイダー天体自動導入装置になります。
これで数日から1週間程度かけて動作テストをします。
■16Bit CPUを2個実装したので、以下の装置等で兼用できます。
1 オートガイダー天体自動導入装置 DOG NS-5000
2 オートガイダーVST
3 DOG ナビゲータ NS-300
4 汎用マイクロステップ・モータードライブ
■CPUボードの概要 (暫定)
1 電源電圧
DOG NS-5000 12 - 24V
その他 12V
2 部品を交換することで、最大4種類の赤道儀(モータ)に対応可能です。
写真の状態で、旧アトラクス、GPD,SP/DX、EM200/EM10に対応できます。
3 赤経、赤緯モータのカレントダウン機能(電流値)を調整できます。
4 マイクロステップ角を設定できます。1/2
1/4 1/8 1/16分割を指定できます。
5 次の端子があります。
オートガイド入出力端子 (LX200互換)
ハンドボックス入力端子
赤経、赤緯モータ出力端子
オートガイダーVST スイッチとランプ端子
オートガイダーVST ビデオ入力、出力端子 (更に独立したビデオ出力端子が1チャンネルあります)
天体自動導入装置DOG ブザーとランプ端子
6 RS232Cが2チャンネルあります。(その内1チャンネルは、DOGまたはVSTに切替え可能)
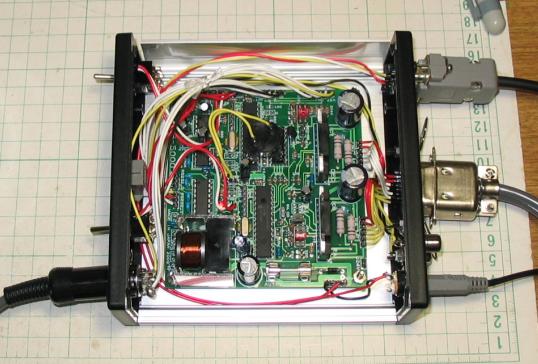
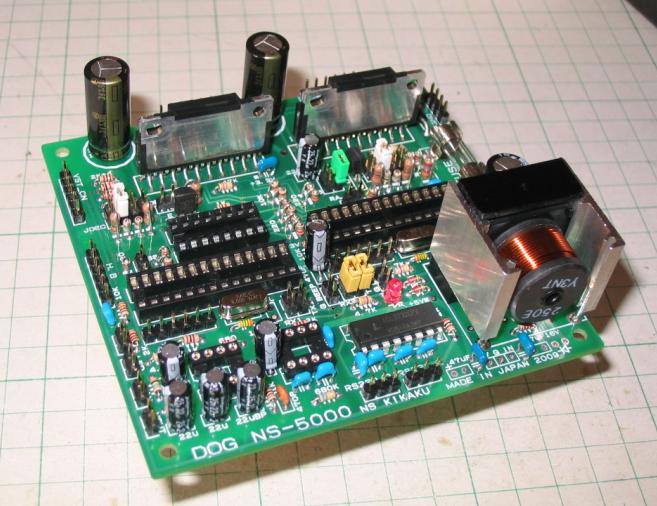
(2009,10/6 AM12:09)
たった今、先週から発注していた、新しいNS-5000
CPUボードが届きました。

さっそくパーツを載せてみました。出来上がりはだいたいこんな感じです。
これから基板のパターンチェックをやります。

(2009,9/23)
NS-5000をご利用いただいている倉谷様から最新のプログラムを送っていただきました。マイクロステップ切替えができるようになりました。
旧アトラクスとSP/DX,GPに対応し、1/2 1/4 1/8
1/16 分割を簡単に切替えることができます。(2009,9/9
,9/18 をご覧下さい)
恒星時速度は、キングスレートを採用されています。
NS-5000設定プログラム2009_9_23.lzh
また、NS-5000GPをご利用いただいているお客様からメールをいただきました。
「お尋ねのGP赤道儀の最高速度ですが、電源電圧24Vで赤経・赤緯とも
に140倍速(#42)を使用してます。
当初実験的には160倍速でも動作することを確認しましたが、余裕を持
たせる意味合いから140倍速にしてます。
自身自動導入装置を使うのは初めてですが、この速度で不満を感じたこと
はありません。」
さらに
「もし改善をお願いするとしたらですが...
①子午線近辺での、鏡筒の東/西位置の干渉を回避する方法とか...
②可搬型の赤道儀で、極軸が正確に出ていない時の自動導入精度を上げる
方法を取り入れて欲しいとは思ってます。」
①②については、あとでふれたいと思います。
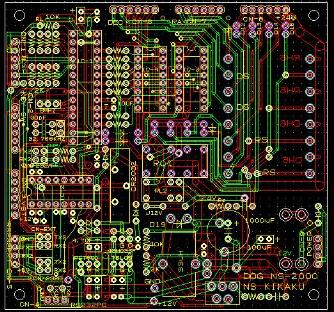
(2009,9/20)
NS-5000 CPUボードのサイズは、NS-500と同一寸法にしました。
したがって、NS-100/200/500からNS-5000へグレードアップする場合、CPUボード交換が比較的簡単にできると思います。
NS-500基板のアートワークです。(基板名はNS-2000となっています)
(2009,9/19)
製作中のNS-5000 CPUボードは、オプションでオートガイダーVSTを内蔵できます。
また少し仕様を変えましたが、ほぼ当初の目標を達成できたと思います。
(2009,3/9)
1 従来のVST Ver3 を正確に、DOG NS-500の16Bit
CPUに移植する。
2 VST Ver3に比べ部品点数を減らしてコストと基板サイズを小さくする。
3 プログラムコードは、できるだけ柔軟な汎用性を持たせる。
最終的な基本仕様は以下のとおりです。
1 天体自動導入装置 DOG NS-5000 です。
2 オプションでオートガイダーVST を内蔵できます。
3 DOG NS-5000を使わず、オートガイダーVSTとして利用することも可能です。NS-5000とVSTは独立して動作します。
4 パソコンは必要ありません。CCDカメラ、TVモニターを用意すればオートガイドできます。
CPUボードのアートワーク作業は昨夜でほぼ終わりました。次は徹底的なチェックです。
(2009,9/18)
今日、NS-5000をご利用いただいている青森県の倉谷様からメールを頂きました。(2009,9/9をご覧下さい)
旧アトラクス、SP-DX赤道儀を 電源24V で駆動した結果をお知らせいただきました。
「こんにちは 倉谷です。
前回と同じ構成で24V駆動テストしてみました。
アトラクス
RA 140
DEC175
SP/DX
RA/DECとも180倍
という結果でした。電圧を上げるとこんなにも差が出るもんなんですね。
驚きました。」
旧アトラクス赤道儀で、140-175倍速で動いたことは、注目すべき結果だと思います。
これにより、旧アトラクス赤道儀は、モータ交換しなくても高速駆動ができることを確認しました。
また、SP/DX、GPD赤道儀でもオリジナルモータ(MT-1)で、180倍速駆動できたことは素晴らしいと思います。
私の所有しているSP赤道儀でも、同じような結果が出ていましたので、確証が得られたと思います。
(2009,4/20 をご覧下さい)
それから、あるサイトを見ていたら「電圧を12Vから24Vにすると、トルクが2倍になる」というという説明がありましたが、
そのような事は起こりません。トルクは、12Vでも24Vでも同じです。
一般的に高速ドライバは、殆ど例外なく、定電流チョッパー方式というドライブ方法でステッピングモータを動かします。
文字通り定電流制御でコントロールしますので、12Vでも24Vでも同じ駆動電流でモータを動かします。
従って、トルクは電流に比例しますので、トルクは同じです。
24Vにするメリットは、トルクではなく、ドライブ信号の特性が改善されることにあります。
電圧を高くすることで、結果的に周波数特性が良くなり高速駆動できるようになります。
定電流方式に対して、一般的なモータドライブは、定電圧方式でモータをドライブしています。これは回路構成が簡単で、低コストという特徴があり、例えば、EM200,
NJP, DOG NS-200,500などは、この方式です。
NS-200,500は、少し工夫して、電圧を高めにして特性を改善し高速駆動を実現しています。
(2009,9/17)
新しくCPUボードを作ります。昨日からCADを使ってパターン設計をやっていますが、ようやくここまでできました。
今晩はもう少し頑張りたいとおもいます。
(2009,9/10)
旧アトラクス、SP-DX用のNS-5000のお客様からメールをいただきました。
「SPDX+ステラナビゲータにて、自動導入の確認とれました。
ベガからM57(リング星雲)へBJ30Cの狭いCCDに
見事に入ってきました。」
下はNS-5000用モータ接続ケーブルです。左はGPD,SP/DX用、右は旧アトラクス用ケーブルです。
NS-5000側のモータ接続用コネクタは同じものです。

DOG NS-5000PK243A1 を出品しました。中古ですが性能は変わりません。ご検討いただければ幸いです。
オリエンタルモータPK223/243/264用です。別途、2種類の赤道儀にも対応できます。
お問合せは直接メールを下さい。内容によっては早期終了する場合があります。
(2009,9/9)
旧アトラクス、SP-DX用のNS-5000をご利用いただいている、青森県の倉谷様からメールを頂きましたので、ご紹介します。
「SP/DXでは、RA、DECとも85倍まで スムーズに動いていました。
アトラクスでは、RA60倍 DEC55倍 まででした。
電圧は、12V なのでこんなもんでしょうか?
写真の構成でテストしてみました。」

|

|
後日、電源24Vでテストをされるそうです、結果が出ましたらご紹介します。
また、倉谷さんは、N88互換
BASIC for Windows 95を使って旧アトラクス、SP-DX切替えプログラムを作られましたので、ご紹介します。
NS-5000設定プログラムB.lzh
「ソフトは、まだ試作で」「昔ながらのCUI」プログラムとのお話でしたが、旧アトラクスとSP-DXの切替えがアッという間にできました。素晴らしいソフトです。
以下は、旧アトラクスとSP/DX,GPDの設定データです。データは、NS-100/500でも利用できます。
NS5000ATLUX_初期化データ
NS5000GP_初期化データ
(2009,8/28)
■旧アトラクス 、SP-DX ,GPD赤道儀に対応するNS-5000を作りました。
正面 左から
電源スイッチ、ランプ、オートガイド端子(VSTコネクタ)、赤道儀切替スイッチ、赤経カレントダウン調整ボリューム、ハンドボックス用コネクタ

赤道儀切替スイッチ 上ATLUX、下SP/DX,GPD
背面 左から
電源コネクタ、マイクロステップ切替スイッチ(M1,M2)、赤経赤緯モータ用コネクタ、RS232Cチャンネル1、2

マイクロステップ切替スイッチ M1、M2スイッチの状態で1/2
1/4 1/8 1/16分割を指定できます。
M1 M2 左がH、右をLとする
H H 1/2分割
H L 1/4分割
L H 1/8分割
L L 1/16分割
■NS-5000に、キー反転コマンドを追加しました。Ver
4.12です。
ハンドボックスを操作すればキー反転ができますが、パソコン側からできませんでした。
デジタルカメラによる撮影方向とパソコンによる遠隔操作方向を見かけ上合わせることができますので、
デジタルカメラ撮影では便利になるでしょう。(Cartes
du Cielではswap buttonでキー反転機能をサポートしています)
(2009,8/20)
先週ご注文をいただいたDOGは、NS-5000の性格をよく表している内容になりました。
ご注文のNS-5000は以下を実装します。
1 スイッチを切替えて 旧アトラクス赤道儀 、SP-DX赤道儀に接続できます。
つまり2種類のモータ(PJ42S1 / PJ42X132、MT-1)に対応できます。
2 マイクロステップ切替スイッチ (1/2
1/4 1/8 1/16分割を指定することができます)
3 赤経カレントダウン調整ボリューム
NS-5000は、恒星時速度になると、自動的に駆動電流を減らす機能が付いています。(カレントダウン機能)
ボリュームは、恒星時速度の駆動電流を直接設定するもので、最小は0から最大約70%に可変できます。(通常は約50-60%固定)恒星時速度以外は、カレントダウン機能は働きませんので、ボリュームの影響はありません。
モータの出力トルクは、駆動電流の大小に比例します。従って、電流を減らすと出力トルクが減っていきます。
一般的に、トルクの大小は振動に影響します。
高速で天体自動導入する場合は、大きなトルクが必要ですが、低速の恒星時速度では本当に必要なトルクはそれ程大きくありません。常に最大トルクで駆動するよりも、恒星時速度だけは、必要なトルクに減らしたほうが、マイクロステップと同様、低振動化に効果があります。今回はボリュームとして3回転型の精密可変抵抗器を使って、間接的に出力トルクを調整します。
現在製作中です、作業が終わりましたら、ご紹介します。
埼玉県のお客様から写真(NS-5000)を送っていただきました。
とても使いやすそうなシステムだと思いました。

(2009,7/27)
■お客様からのご希望もありNS-5000に、加速、減速パルスコマンドを追加しました。DOG
NS-5000 Ver 4.11です。
コマンドでパルス(係数)を加減すると、それに応じてモータの加速、減速スピードが変化します。
これまで固定値のままでしたが、超高速駆動ができるようになって加減速スピードの調整が必要になってきたと思います。
; 加速、減速パルス コマンド
(2009,7/17)
; RA
DEC
; :=CRUxxxx# :=CDUxxxx# 加速パルス(係数)を設定する
xxxx16進数
; :=CRDxxxx# :=CDDxxxx# 減速
加速、減速パルスは、スピード番号16から最高速番号の間で使われます。
例えば、仮に20に設定されていて、最高速が50番に設定されていれば、加速では、16番から20パルス出力するたびに、17、18--50番とスピードアップしていきます。
減速は、その逆となります。
例えば、加速パルス=20 減速パルス=3 とすれば、
総加速パルス=(50-16+1)*加速パルス=35*20=700パルス つまり、700パルスで最高速度になります。
総減速パルス=(50-16+1)*減速パルス=35*3=105パルス つまり、105パルスで減速終了します。
加速では問題ありませんが、総減速パルスは以下の注意が必要です。
常にそのようになるとは限りませんが、ワーストケースでは、自動導入が完了してから、総減速パルス分だけオーバランする可能性があります。
例えば、恒星時50PPSとすれば、
15”(秒角)/ 50=0.3”(秒角) ですので、 0.3”*105=31.5”
(秒角)

NS-5000GP Ver4.11とMT-1モータです。お客様のご希望により、オートガイド端子をVSTコネクタにしました。
(2009,7/8)
NEWアトラクス赤道儀

NEWアトラクス赤道儀用に作ったコマンド・テキストです。 赤経 赤緯
(2009,7/7)
昨夜、NEWアトラクス赤道儀とNS-5000(PK243A1相当)の高速駆動、自動導入テストについてメールを頂きましたので、
ご紹介します。
「今の感想としては12Vでの使用で十分な感触です。
ニューアトラクスと同じ感覚で高速導入できます。
逆にこれ以上の高速は不要に感じました。」
「とても反応が良いですね、さすがステッピングモーターです。
今は眼視でテスト中ですが倍率は200倍ぐらいですが振動は一切感じません。
今の設定の45~50PPSでも十分だと思います。
また中速(もう少し早くても良い)、低速、微速は丁度良いスピードで
眼視での目標天体がとてもスムーズかつ正確に導入できます。」
(2009,7/4)
現在お客様のもとでNEWアトラクス赤道儀とNS-5000(PK243A1相当)で高速駆動、自動導入テストが行われています。
それについて、お客様からメールが届きましたので、ご紹介します。
NEWアトラクス赤道儀は、お客様が STAR BOOK DCサーボモータからステッピングモータへ換装を決めて、
ご自分でモータ取付け金具を自作して換装されました。
1.自動導入最高速度 12V RA:340倍 DEC:370倍
24V RA:454倍 DEC:555倍
結果は、NEWアトラクス赤道儀に鏡筒を載せていない状態でテストしています。
電源12Vで赤経、赤緯ともに300倍速を越えています。これは注目すべき結果だと思います。
PK243モータは、許容最高速度が、6Kppsですから、これを1/4分割マイクロステップ駆動に換算すると、
24Kppsに相当します。24Vの結果は、ほぼPK243の限界スピードが出たことになります。
これについて、お客様は
「 もっと早い速度で回っていましたが、何度も自動導入させている内に脱調してましたので
最終的に安定して動く速度です。
実際に鏡筒を取り付けた状態で再度テストしてみます。」
NEWアトラクス赤道儀の駆動系は、以下の内容で換装されています。
赤経、赤緯モーター SHギヤードタイプ PK243A1-SG10
■赤経
モーター1回転:200step
マイクロステップ:1/4分割
ギヤヘッド減速比:1/10
減速比1:3 ピニオンギヤ モーター側:30T(M0.5) 赤道儀側:90T(M0.5)
ウォームホイール歯数:180山
T * 200 * 4 * 10 * 3 * 180 = 86164
T=19.945 [mS]
恒星時速度 50.1369 pps
基本定数 4320000 0x0041EB00 (基本定数=
200 * 4 * 10 * 3 * 180)
■赤緯
モーター1回転:200step
マイクロステップ:1/4分割
ギヤヘッド減速比:1/10
減速比1:2.7 ピニオンギヤ モーター側:40T(M0.5) 赤道儀側:108T(M0.5)
ウォームホイール歯数:180山
T * 200 * 4 * 10 * 2.7 * 180 = 86164
T=22.161 [mS]
恒星時速度 45.1232 pps
基本定数 3888000 0x003B5380 (基本定数=
200 * 4 * 10 * 2.7 * 180)
今回は1/4分割でテストしていますが、1/8,1/16分割も可能です。
■NS-5000は、赤経、赤緯カレントダウン機能を以下のように調整しました。
赤経モータ
恒星時駆動では、自動的にモータ電流が、定格電流の 約60%
0.5A にカレントダウンします。
電流を下げて必要最小限のトルクに抑えることで、マイクロステップ駆動と同様に低振動化が期待できます。
赤緯モータ
停止時モータ電流は、定格電流の 約30% 0.25A
省電力、モータ発熱防止に効果があります。
赤経カレントダウン機能は低振動化に非常に効果的です。しかし、赤道儀の状態はそれぞれ異なります。
カレントダウンすると振動が低くなりますが、やり過ぎると、トルクが不足して恒星時駆動が止まってしまいます(脱調)。
したがって、カレントダウンの調整は、お客様が赤道儀の状態に合わせて行うのが最もいい方法だと思いました。
お客様が調整できるように、その方法について検討してみたいと思います。
(2009,7/1)
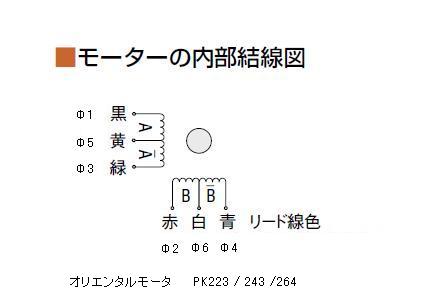
NS-5000 と オリエンタルモータ PK223/PK243/PK264シリーズ との結線方法について説明します。
■DOGモータプラグ(赤経、赤緯)は、以下のとおり定義しています。
φ1-φ6定義は、NS-4/12そしてNS-100/200/500/5000でも基本的に同じです。
この信号配列はビクセンMT-1モータと互換性があります。
(DOG NS-4/12EM200,EM10の場合にのみ、極軸ランプ電源供給のため、φ5φ6の定義が異なっています。)

■赤道儀側には、DOGモータプラグに対応した、コネクタを用意する必要があります。

■赤道儀にオリエンタルモータ PK223/243/264 を使う場合、下図を参考にして配線してください。
(2009,6/25)
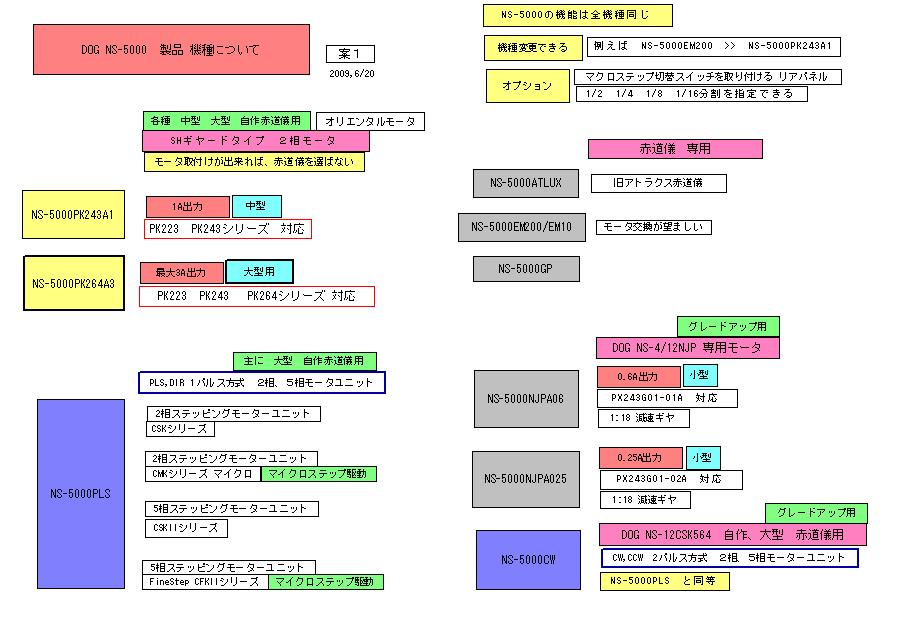
NS-5000の価格を決めました。興味あるお客様はご検討いただければ幸いです。価格はこちら
汎用の天体自動導入装置として設計していますが、赤道儀の種類というよりもモータの違いに合わせて数種類のNS-5000を用意しました。
具体的な価格は、必ずメールでお問い合わせください。お見積もりします。
今回は、特に中型赤道儀、SHギアードタイプ取付け赤道儀で実績を作りたいと思っています。
早いお申し込みの場合はお見積もりを考慮させて頂きます。
これは、DOGナビゲータで使用したエンコーダ(OIH48-4096P6-L6-5V)です。こちらで販売されています。
エンコーダの基本分解能は4096パルスで、それをAB相で4逓倍して、1回転 16384パルス になります。

(2009,6/21)
今回製作したDOG NS-5000はオートガイダーVSTを内蔵していません。
内蔵タイプをご希望の場合は、暫くお待ちください。(あと2月ほどかかる予定です)
■2チャンネルのRS232Cに、パソコン2台接続し、それぞれに
TheSky, Cartes du Ciel、ステラナビゲータv6等を実行させました。
同じソフトでも、異なる場合でも、問題なく星図表示、自動導入、モータコントロールできました。
2台のスクリーンを見ながら、星図表示、天体自動導入するのが、とても興味深く感じました。新しい応用と可能性が広がるかも知れません。
ただし、27Kppsの超高速自動導入(恒星時100ppsなら270倍速相当)を試したところ、ほとんど問題なく動作していましたが、
TheSkyにおいて、1度「通信品質が低いので接続を終了する」旨のメッセージが表示されました。
再び接続して試しましたが、今度は大丈夫でした。
超高速駆動中では、特に2チャンネルで星図ソフトを同時起動する場合、通信品質が低下する可能性があります。
しかし、1チャンネルが星図ソフト以外ではこのような症状はまず発生しないと思います。
■DOG NS-5000は下図のようにして販売する予定です。(名称は変更する場合があります)
今日よりDOG NS-5000の販売受付を始めます。(納期は約2週間ぐらいです)
DOG NS-4/12からのグレードアップにつきましても、今日より受付を始めます。
後日ご案内をWebで公開します。
お見積もり、お問い合わせは メールでお願いします。
特に中型赤道儀、SHギアードタイプ取付け赤道儀で実績を作りたいと思っています。
ビクセン 旧ATLUX赤道儀、タカハシTemma、USD、NJP、EM200/10など対応できます。
また、他社製の各種モータに余裕で対応できます。
早いお申し込みの場合はお見積もりを考慮させて頂きます。
よろしくお願いします。
DOG NS-500GP (NS-200からグレードアップ)をご利用いただいている、東京 八王子市の小澤様からメールを頂きました。
小澤さんは ビクセン センサー赤道儀に MT-1モータを取付加工されて、天体観測されています。
当初MT-1モータの振動に悩まされていましたが、取り付けを工夫して解決されました。
写真が同封されていましたので、ご紹介します。
http://www5a.biglobe.ne.jp/~T-Kozawa/

(2009,6/20)
NS-5000をテストしています。
■ビクセン MT-1モータ で 1/2, 1/4, 1/8,
1/16分割のマイクロステップ駆動
実際に赤道儀と Cartes du Ciel でテストしましたが、全く問題ありませんでした。
恒星時速度、座標、導入精度は正確で、NS-500と変わりませんでした。
これにより、マイクロステップ駆動が正確に分割、コントロールできることを確認しました。
■DOG NS-5000のスピードの限界について調べました。
1/16分割 赤経、赤緯モータを 42Kpps で超高速駆動しましたが座標、導入精度に問題ありませんでした。
ただし星図上の望遠鏡位置マークの表示速度が遅くなりました。(座標は正確です)。
おそらくCPUの処理能力の大半がモータ処理にまわされて、表示が停滞したのではないかと思います。
42Kpps は以下のスピードに相当します。
恒星時100ppsのマイクロステップなら、420倍速
NJP (50pps2相フルステップ、1分割) 840倍速
EM200 (25pps1-2相ハーフテップ、1/2分割) 1680倍速
EM10 (12.5pps2相フルステップ、1分割) 3360倍速
GP・D (20pps1-2相ハーフテップ、1/2分割) 2100倍速
■MT-1モータ 最高速テスト 赤道儀に相当な負荷を加えています
1/16分割 恒星時速度 154pps
12V 最大90倍速 13.8Kpps
24V 最大100倍速 15.6Kpps
1/2分割 恒星時速度 19.2pps
12V 最大90倍速 1.8Kpps
24V 最大145倍速 2.8Kpps
今回の結果からGP、SP赤道儀の実用速度は、100-150倍速ぐらいだと思います。
DOG NS-5000は、近日発売予定です。
なるべく安価にするために、小型、中型、大型赤道儀用に分けて(主にドライバ出力により)発売したいと思います。
NS-5000は汎用です、ほとんどの赤道儀に対応できます。また、特定の赤道儀向けのNS-2000を用意したいと思います。
(2009,6/16 追加)
NS-5000の試作機を作りました。動作テストしています。
正面 左から電源スイッチ、ランプ、オートガイド端子(LX200互換モジュラージャック か VSTコネクタ)、ハンドボックス用コネクタ
オートガイダーVSTは実装していません。実装する場合は、空いているところにオートガイドスイッチとオートガイドランプを付ける予定です。

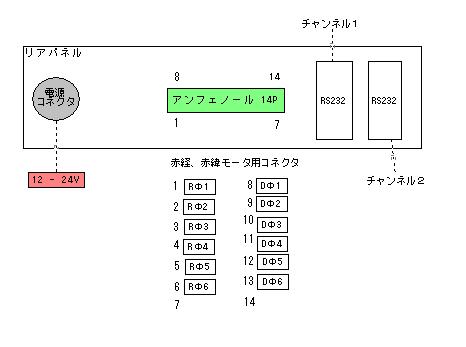
NS-5000 背面の様子です。
左から、電源コネクタ、赤経赤緯モータ用コネクタ(アンフェノール 14P)、RS232Cチャンネル1、2

大型赤道儀の場合は、ひと回り大きな専用ケースを使う予定です。
外観は、改良のため予告無く変更する場合があります。
(2009,6/12)
これは現在製作中のDOGナビゲータです。
ミカゲ210赤道儀にエンコーダを取付けて、DOGナビゲータで天体導入支援、座標表示されます。
エンコーダとの接続は、ケーブル取り回しを考えてパルステックコネクタ互換にしました。
ASTRO SCALEの代わりにDOGナビゲータをご利用いただけます。

以下は、DOGナビゲータについて、お問い合わせから、ご注文、赤道儀で実際に天体導入するまでのメールです。
導入事例として参考にしてください。
(2009,6/6)
今日は別のところから、高速ステッピングモータ・ドライブ基板の重要な部品が到着しました。寸法、位置がピッタリ合いました。
実装したのは、DC-DCコンバーターです。入力 10 -
40V 出力5V 2A ±0.1V 高性能です。
DOG NS-5000を作りテストをしたいと思います。

(2009,6/5)
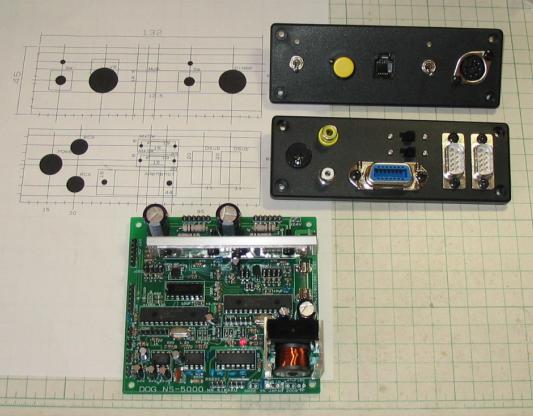
注文していたDOGケースと電子部品が今日ようやく届きました。
これで作業中のNS-500を作ることができますが、もう一つ新しいケースを注文していました。
写真の下がそれです。これは、オートガイダーVSTを内蔵しないタイプのDOG
NS-5000に使う予定です。
NS-5000はオートガイダーVSTを内蔵するタイプとそうでないタイプの2種類用意することにしました。
オートガイダーは持っているので必要ないお客様に対応できると思います。
内蔵タイプはまだ作業が残っています、暫くお待ちください。
この1週間は、高速ステッピングモータ・ドライブ基板を製作していました。基板設計も済ませて試作機を作りました。
テストはこれからやります。
それから、お客様からのメールでDOGは以下のアプリケーションソフトに対応することを確認しました。
1 SUPER STARⅣ では、LX200
2 MaxIm DL では スカイセンサー2000
を選択して接続できました。
だいたい写真のように基板を実装する予定です。

(2009,5/22)
ブートローダ関係のコマンドとセルフプログラミング機能を現行機種に追加しました。
また、星図ソフトとハンドボックスの同時使用が出来るように改良しました。バージョンを上げました。
NS-100 2軸モータドライブ
Ver 3.09
NS-200 天体導入
Ver 3.09
NS-300 DOGナビゲータ
Ver 3.08
NS-500 天体自動導入
Ver 3.09
16Bit CPU版ハンドボックスのプログラミングをしています。
だいたいの仕様は以下のとおりです。
1 CPUはDOGと同じ物を使います。
2 NS-500用ハンドボックスを接続できます。またオートガイド端子も用意します。
3 液晶パネル用の出力ポートがあります。今のところ実現するか未定です。
4 ビデオ出力端子があります。
ビデオ出力については、ソフトを作っていないので動きませんが、興味深いテーマですので、今後取り組んでみたいと思います。
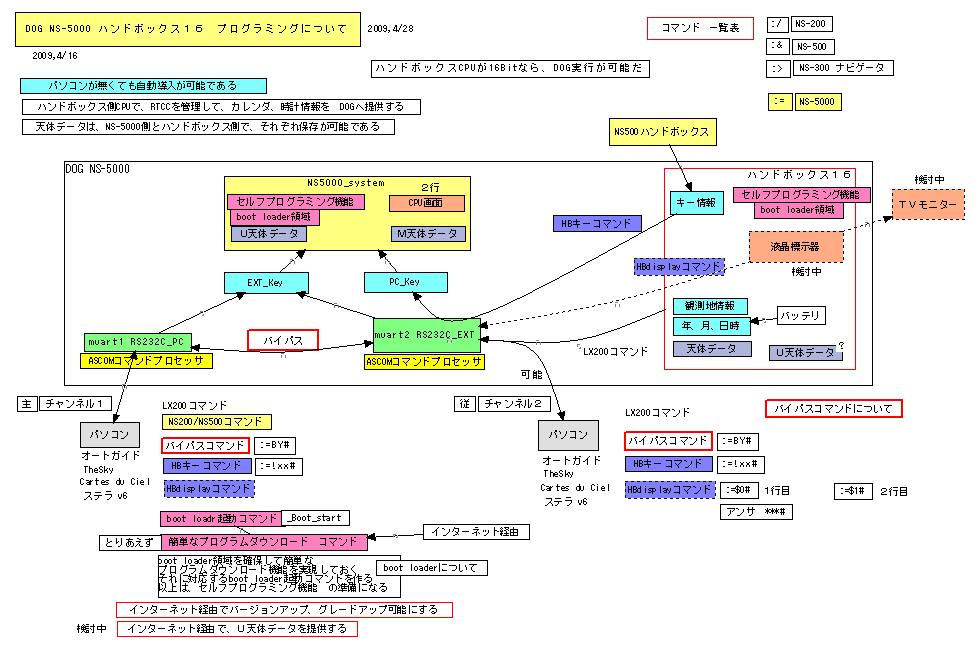
それから、ハンドボックスにも、ブートローダ、セルフプログラミング機能を実装しました。
こちらのサポートは、バイパスコマンドで可能だろうと思っています。
バイパスコマンド(:=BP#)をDOGに送信すると、バイパス状態になります。この状態は、RS232Cのチャンネル1と2の間で全2重通信を実現します。通信は基本的にASCIIコードで行い、ファイルの最後にCTRL-Z(0x1A)が付いていると、バイパス状態(コマンド)が終了します。
(2009,5/17)
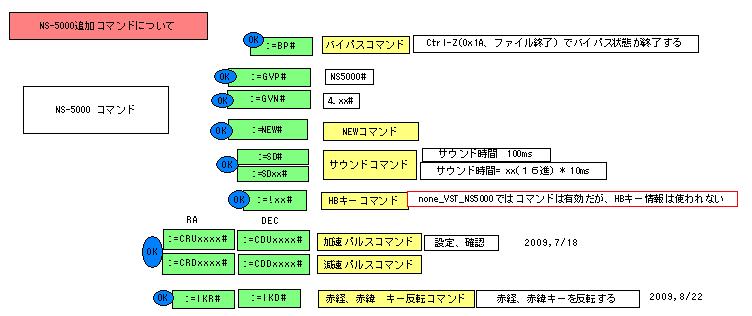
NS-5000の開発で、以下を実現しました。
:=BP# バイパスコマンド
:=GVP# 製品名を表示
:=GVN# バージョンを表示
:=NEW# 従来の:/NEW# :&NEW# :&XNEW# を統一しました、U天体の :&UNEW# はそのままです。
:=SDxx# サウンドコマンド
IDコマンド
以上の他に特別なブートローダ関係のコマンドを作りました。
また、ブート領域で実行するセルフプログラミング機能も実現しました。
この機能は、マイコンのプログラムメモリの一部、あるいは全部を自由に変更することができます。
これにより、NS-5000はインターネット経由でバージョンアップ、グレードアップができるでしょう。
DOG NS-200GPですが、NS-5000への無償グレードアップ特典付きのサンプルをこちらに出品しました。
NS-200では GP専用ですが、NS-5000では汎用になる予定です。
興味あるお客様はご検討いただければ幸いです。
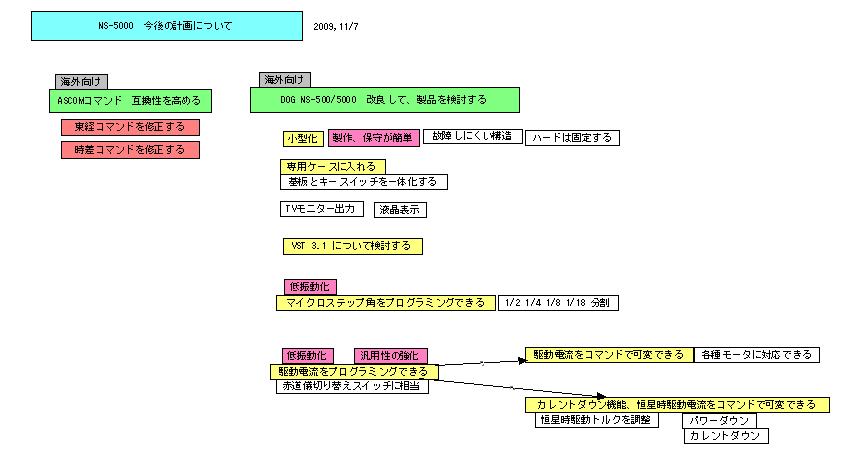
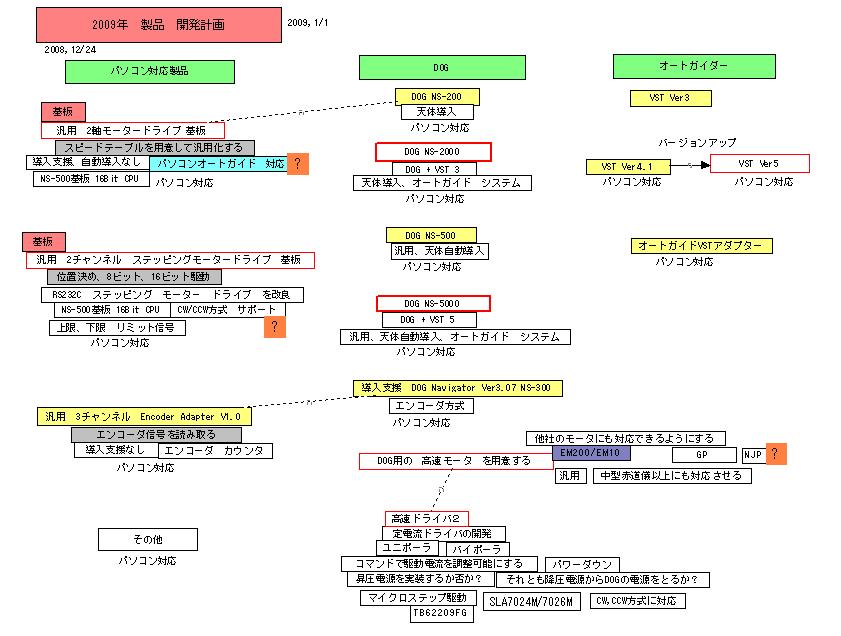
以下は今年の計画です。黄色の部分が開発したものです。
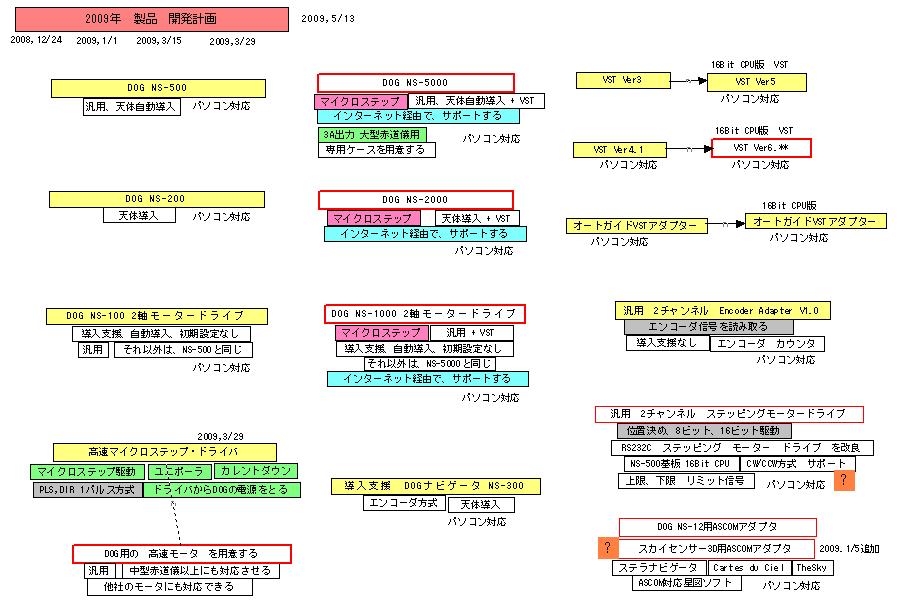
(2009,5/3 追加)
■ハンドボックスとNS-5000について検討しています。(16Bit
CPU版のハンドボックス)
あとで役立つと思ったので、バイパス機能を考えました、プログラムは終わっています。
セルフプログラミング機能は実現したいと思っています。
これが出来ると、インターネット経由でバージョンアップ、グレードアップが可能になるでしょう。
それから、現在のところ、バージョンアップは無償で行っています。Ver3.07が最新バージョンになります。
ご希望のお客様はご連絡ください。また、ブザー機能をサポートできます。(有料)
グレードアップにつきましては直接ご購入いただく場合よりも、必ず安くグレードアップできるように価格設定します、ご検討ください。
■モータについてご紹介します。
NJP,EM200,EM10など、比較的低速用のモータを使っている赤道儀の場合は、同型、同寸法の高速モータ(USDのような)と交換して
高速自動導入を実現するのが、確実で、しかも安全な方法だと考えています。
GP,SP用のMT-1モータは、テストの結果からも、それで十分高速です。それ以上はとくに必要ないと感じます。
私の場合、100倍速は十分速いと思っています。
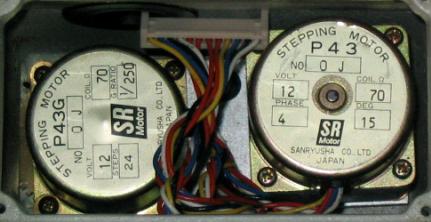
EM200/200B用 モータ
赤経(右) 三龍社 P43 12V
70Ω 定格電流 約0.17A G.H 1/250
赤緯(左) 三龍社 P43G 12V
70Ω 定格電流 約0.17A G.H 1/250
恒星時速度 25pps (1/2分割、ハーフステップ)
最高速度は、駆動テストの結果をご覧下さい。
EM200USD用 モータ
赤経(右) 三龍社 P43H 1V
2Ω 定格電流 約0.5A G.H 1/500
赤緯(左) 三龍社 P43GH 1V
2Ω 定格電流 約0.5A G.H 1/500
恒星時速度 50pps (1/2分割、ハーフステップ)
PM型の高速タイプのモータです。
NS-5000 高速マイクロステップ・ドライバに最適なモータだと思います。
おそらく200倍速以上可能でしょう。

(写真はネットで公開されていたものです)
NJP PD5-XY用 モータ
赤経(左) 日本パルス PF5-48 12V
100Ω 定格電流 約0.12A G.H 1/125
赤緯(右) 三龍社 P43G
12V 100Ω 定格電流 約0.12A G.H
1/250 (EM200と同じモータ)
恒星時速度 50pps (1分割、フルステップ)
消費電流は少ないのですが、全くの低速向きモータです。高速はせいぜい6倍速ぐらいです。
しかし、どちらもEM200USDと同じように、同型の高速モータと交換すれば、相当な高速化が可能だと思います。

NJP PD3-XY用 モータ
赤経(左) 日本パルス PF5-48 12V
100Ω 定格電流 約0.12A G.H 1/250
赤緯(右) 三龍社 P43G
12V 70Ω 定格電流 約0.12A G.H
1/500 (EM200と同じモータ)
恒星時速度 100pps (1分割、フルステップ)
消費電流は少ないのですが、全くの低速向きモータです。ギア比がPD5の倍になっており、
恒星時速度は100ppsですが、最高速度はおよそ3倍速程度しかありません。
しかし、どちらもEM200USDと同じように、同型の高速モータと交換すれば、相当な高速化が可能だと思います。


(写真はお客様からご提供いただいたものです)
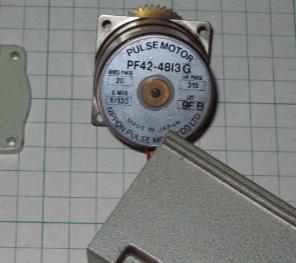
GPD,SP用 MT-1モータ
赤経、赤緯 日本パルス PF42-4813G
約6.3V 20Ω 定格電流 0.315A
G.H 1/120
恒星時速度 19.2pps (1/2分割、ハーフステップ)
PM型でも、比較的高速向きのモータです。テストから100倍速以上が期待できそうです。
NS-5000には、とくに中型、大型赤道儀、自作用として、オリエンタルモータは最適だと思います。
PK223シリーズ(SHギヤードタイプ)取付角
28mm
PK243シリーズ(SHギヤードタイプ)取付角
42mm
いずれもPM型を圧倒するほどの高トルク、高速駆動、マイクロステップ駆動が可能です。
(2009,4/22)
EM200赤道儀で駆動テストをしました。

ドライバ電源12V (赤経モータ、1/2分割)
1 P43モータ(PM型) 最高約46倍速 (約1100pps)
クランプ開放して、無負荷で最高1100ppsぐらいが限度で、実用では30倍以下になると思います。
ほとんどドライバを使った効果は無いといった感じです。
ドライバ電源24V (1/2分割)
1 赤経モータ、P43モータ 無負荷で 最高約120倍速 (約3000pps)
2 赤経モータ、P43モータ 手で負荷をかけながら 約90倍速 (約2300pps)
3 赤緯モータ、P43Gモータ 無負荷で 最高約110倍速 (約2900pps)
P43は、定格電圧が12V コイル抵抗 70Ω/相の低速用モータです。初め0.17Aにモータ電流を設定したところ、トルクが少なく、
回転(脱調)しませんでした。詳しく調べたところ、コイルに所定の電流が流れていませんでした。原因は、少し専門的になりますが、
チョッピングON時(モータ電流を流す)にスパイク状のノイズ(リンギングノイズ)が発生して、そのノイズにより設定電流値(検出電圧)を越える検出電圧を検出して、その結果チョッピングOFF(モータ電流OFF)になっていました
つまり、チョッピングON(モータ電流を流す)した途端にチョッピングOFF(モータ電流OFF)になっていて、十分なトルクが発生していなかった訳です。幸い、ブランキング期間が用意されていますので、確実に一定のチョッピングON時間(1.5us
)は保証されています。
以上は特に低速モータで問題になります。解決方法として、設定電流を何割か高めに設定すると十分なトルクが出てきました。
そこで今回は、0.25Aに設定して上記のテストを行いました。2時間ほど観察していましたが順調に動いていました。
赤緯モータは、かなり高速で動きましたが、許容出力トルクが比較的小さなモータです。実用では、たとえ100倍速で動いたとしても、
50-60倍速ぐらいで使われることをお勧めします。
(2009,4/20 追加更新)
高速マイクロステップ・ドライバの駆動テストを行っています。
次のモータでテストをしました。
1 ビクセンGP・D用 MT-1モータ(PM型、永久磁石を使っています)
2 手持ちのハイブリッド型モータ (S4H40B
6.3V-9.7Ω 1.8DEG/STEP SHIBAURA)
■1/2, 1/4, 1/8, 1/16分割のマイクロステップ駆動テストをしました。
MT-1、ハイブリッド型どちらもマイクロステップ駆動できました。
ただし、マイクロステップ角度の精度については考慮する必要があります。マイクロステップ・ドライバICとステッピングモータについて各種調べましたが、マイクロステップ角の精度まで保証するものはありませんでした。特にPM型ではステップ精度は期待できないと思われます。しかし、それにより低振動化できるなら意味があるかも知れません。
■MT-1(モータ電流 定格0.3A)、ハイブリッド型で最高速を調べました。モータ単体で無負荷の状態です。
ドライバ電源12V (1/2分割)
1 MT-1モータ電流 0.17A 最高150倍速
(定格電流より少なめにしたことで、周波数特性が改善されスピードが伸びたようです、ただしトルクは半分です)
2 MT-1モータ電流 0.25A 最高100倍速 (1.9Kpps)
12Vの電源電圧で100倍速のスピードが出たのは注目すべき結果でした。
やはり本格的な定電流チョッパー方式のマイクロステップ・ドライバを使った結果だと思います。
ドライバ電源24V (1/2分割)
1 MT-1モータ電流 0.25A 最高180倍速 (3.5Kpps)
2 ハイブリッド型モータ 0.25A では、220倍速(4.2Kpps)で動くのを確認しました。それ以上は未確認。
180倍速は、相当なスピードです。実用スピードは150倍速に近いかも知れません。
以上のテストのコマンド・テキスト、恒星時速度は19.25pps(GP・D赤道儀)です。
■ドライバ電源12V (1/8分割)
1 ハイブリッド型モータ 0.17A 最高135倍速(20Kpps)
2 ハイブリッド型モータ 0.25A 最高160倍速(約25Kpps)
赤経を限界の160倍速(約25Kpps)で駆動中に、赤緯220倍速(約35Kpps)で駆動しても、赤経側に影響が認められませんでした。このテストで、NS-5000 の高速性能の高さを証明できたと思います。
この時のコマンド・テキストです。恒星時速度は、154ppsです。
次はEM200赤道儀でテストします。
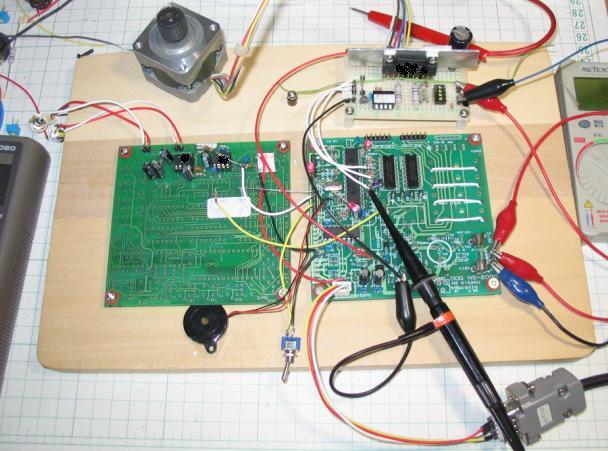
(2009,4/19)
高速マイクロステップ・ドライバを作りました。
これを使っていろいろとデータを取りたいと思います。

(2009,4/15)
NS-5000はこの1週間順調に開発が進みました。
DOGは、オートガイダーVSTと共に動作しています。NS-500から始めた開発はNS-5000のレベルに達しています。
1 オートガイダーVST v5を実装しました。予定どおりDOGのガイドスピード(0.5倍速)でオートガイドができることを確認しました。
2 高速マイクロステップ・ドライバ用のCW,CCW 2パルス方式、
PLS,DIR 1パルス方式を実現しました。
まだモータを動かしていませんが、出力信号を観測しましたので、ほぼ間違いなく動くと思います。
3 2チャンネルのLX200互換コマンド機能(ASCOM対応)は順調に動作しています。
4 カレントダウン機能を実現しました。赤経モータは恒星時駆動または停止時、赤緯では停止時に、自動的にカレンドダウンします。
赤道儀モード、経緯台モードどちらでも有効です。
5 モータを駆動するためのプログラムを改良して1ステップ処理時間を大幅に短縮できました。これは重要な成果だと思っています。
1ステップ処理時間とは、モータを最小の1ステップ角動かすのに必要な処理時間を表していて、その内訳は、正転、逆転、加速駆動、
減速駆動、バックラッシュ補正駆動、カレンドダウン機能、そして赤経と赤緯の座標計算を含んでいます。
つまり、この1ステップ処理時間がモータを駆動する場合の最小単位で、これより高速でモータを回すことはできません。
さらなる高速駆動を目指す場合は、1ステップ処理時間を減らす必要があります。
DOG NS-500では1ステップ処理時間は約40us(マイクロ秒)でした、NS-5000ではソフトの改良で8us以下にできました。
ステップ処理に限れば、約4、5倍高速化したことになります。おそらく
20Kpps (周期は50usです)以上の超高速が実現できそうです。
20Kpps は以下のスピードに相当します。
恒星時100ppsのマイクロステップなら、200倍速
NJP (50pps2相フルステップ、1分割) 400倍速
EM200 (25pps1-2相ハーフテップ、1/2分割) 800倍速
EM10 (12.5pps2相フルステップ、1分割) 1600倍速
GP・D (20pps1-2相ハーフテップ、1/2分割) 1000倍速
ドライバの製作もありますが、ハンドボックス側のソフトも作る必要があります。
はじめ8Bit CPUを予定していましたが、16Bit版も用意することにしました。どちらにするかは、基板設計時に決めたいと思います。
できれば、コストは少し高くなりますが、やはり16Bitが作りやすく高機能で将来性があると思います。
ラッコのクーちゃんの写真が撮れました。3回目でやっと見ることができました。とてもめんこいです。
4月10日 pm5:20 釧路川 幣舞橋にて

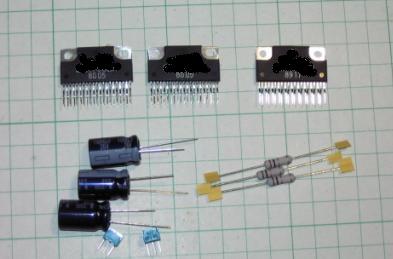
(2009,4/6)
今日、ようやく高速マイクロステップ・ドライバ用のICが到着しました。
これで NS-5000の試作機を作ることができます。
NS-5000のために、以下の機能を実現しました。
ハンドボックス接続用として、RS232Cを2チャンネルに増やして、それにもLX200互換コマンド機能(ASCOM対応)を実装しました。
これにより、DOGは2台のパソコンからコントロールできます。
LX200互換コマンド機能は、2チャンネルのRS232Cで共用するのではなく、同時に独立して動作させることができます。
例えば、1台目のパソコンは、TheSkyで望遠鏡位置をリアルタイムで表示しながら、2台目はモータコントロール、Cartes
du Cielで天体自動導入をしたり、あるいはPHD
Guidingでオートガイドすることが可能です。
(2009,3/30)
高速ドライバの回路設計は終わりました。はじめは少し 2相/1-2相ドライバ それともマイクロステップにするか考えましたが、
定電流チョッパー式のマイクロステップにしました。マイクロステップ用のドライバはいろいろあり、選択に迷いますが、
機能、サイズ、入手性、コスト・・などからドライバICを決めて、高速ドライバの仕様はだいたい以下のようにしました。
・ 1/2 1/4 1/8 1/16分割のマイクロステップ駆動ができます。
・ 電源電圧は標準で 12Vから24V の範囲で対応し、DOG全体の電源もドライバから供給するようにしました。
・ 出力電流(モータ駆動電流)は 最小 0.15A
ぐらいから 最大3Aまでで、小型から大型赤道儀まで十分に対応できると思います。
・ さらなる低振動化と省電力化ために、カレントダウン機能(モータ駆動電流を減らす)を用意しました。
・ クロック信号(PLS)、正逆転切替信号(DIR)の1パルス方式。ユニポーラ駆動です。
名前は、高速マイクロステップ・ドライバ とします。
目標の DOG NS-1000/2000/5000は、以下の3つを組み合わせて作ることになります。
DOG NS-500 + 16Bit CPU版オートガイダーVST + 高速マイクロステップ・ドライバ
高速マイクロステップ・ドライバは、新型
CPUボードに実装する予定です。今のと同じサイズが目標です。
まだやる事が残っていますが、これで開発の目途がついたと思います。
完成後は、DOG NS-100,200,500 それにオートガイダーVST
Ver3,Ver4.1、VSTアダプターなどからのグレードアップを予定しています。
また、旧型のDOG NS-2/3/4 ,オートガイダーSST,NS-10/11/12につきましてもご希望があればグレードアップを行います。
DOG NS-2/3/4,SST,NS-12は発売からだいぶ時間が経ちましたが、いまでも大切にご愛用いただいているお客様がたくさん居られます。
作った者として大変ありがたく思っています。その意味で旧型の製品は、重要なグレードアップにしたいと思っています。
DOG NS-200から始まった一連の開発は、このグレードアップがしたいのと、DOGカレンダーの期限(2010年)が近づいているので
グレードアップで解決したいとの考えもありました。
(2009,3/13)
VST v5の開発は、ほぼ終了しました。順調に動作しています。16Bit
CPU版の 新型オートガイダーVST v5 の完成です。
これを現在のVST Ver3の後継機種とします。
それからパソコン対応のVST v4.1の方は、v5をベースにして、これまでいろいろ検討しましたので、それを基にして、
機能を拡張して用意したいと考えています。
新しい製品を作るために、新しい CPUボードを作ります。
そのために、何種類か回路設計してきましたが、もう一回見直しました。
少し手を入れて次のような感じです。
新型 CPUボード概要
1 CPUボードは、DOG、VSTの単独、共存としても使えます。
2 16Bit CPU でDOG,VSTをコントロールし、ハンドボックス、液晶表示器用に
8Bit CPUを加えます。
回路変更なしで40MIPS CPU と交換可能の予定です。これは、さらなる高速動作に役立つと思います。
3 8Bit CPUは、シリアル(RS232)でインターフェースしますので、この部分をケーブルで外まで延長すると、
液晶付きハンドボックスが実現することになります。
4 CW、CCW 2パルス方式 と 1パルス方式 に対応させます。これはオリエンタルモータ標準方式です。
また、DOG NS-500 8ビットパラレルもそのまま対応させますので、現状の高速ドライバと互換性があります。
5 新型CPUボードは、DOG NS-2000/5000/VST・・・に使う予定です。
これで終わったわけではありません。まだ肝心な開発が残っています。
高速ドライバ2を作ります、まだまだ検討中ですが、小型から大型赤道儀まで対応し、高速駆動と低振動を実現するために、
マイクロステップ駆動を予定しています。
(2009,3/9)
しばらく時間があきましたが 新型VST v5 の開発をしていました。試作基板を作り、プログラミングもほぼ終わっていますが、
この2,3日は苦労しました。WBCの日本と韓国の試合を見ながらバグ取りしていました。
残念ながら日本は負けましたが、VST v5は、基本的なところまで動きだしました。
あともう少しだと思います。
VST v5は、以下を基本的な目標にしています。
1 従来のVST Ver3 を正確に、DOG NS-500の16Bit CPUに移植する。
2 VST Ver3に比べ部品点数を減らしてコストと基板サイズを小さくする。
3 プログラムコードは、できるだけ柔軟な汎用性を持たせる。
VST v5が完成すると、以下のような製品を作ることができると思います。
1 オートガイダー天体自動導入装置
2 オートガイダー2軸モータドライブ
3 オートガイダーデジタル表示機
あまり聞いたことのない名前ですが、このような装置も考えられます。
天体自動導入機能付きオートガイダーVST
新型VST v5が完成すると、これまでにない新しい製品を提供できると思います。
参考までに、試作基板をご紹介します。左が今のオートガイダーVST、右が新型VST v5試作機です。
VST v5は、初めからDOGに組み込むことを前提に開発しています。
それから、ASCOMアダプターの開発は後回しにしました。

(2009,2/14)
今日までいくつか新しい製品を出してきました。
1 DOG ナビゲータ NS-300
2 エンコーダアダプター
3 PIC24F マイコンボード
4 DOG NS-100NJP (2軸モータドライブ)
PIC24F マイコンはNS-500で使ったCPUボードの販売です。
新しい販売方法として基板販売を考えましたが需要は小さく、一般的な電子部品として販売することにしました。
しかし、この分野は競争はきびしく前途多難と感じます。
DOG NS-100NJPは現在サンプル出荷しています。これも基板から完成品にきりかえて販売したいと思います。
今日は、これに関連して恒星時速度の計算方法についてご紹介したいと思います。
ビクセン GP,GPD,SPDX 恒星時速度
赤道儀 ウオームホイル 144:1 伝達ギア比 1:1
モータ 48ステップ/1回転(フルステップ) 減速ギア比 120:1
GPD赤道儀は、恒星時駆動としてハーフステップ駆動を使っています。96ステップ/1回転(ハーフステップ)
以下の関係があります。
T * 96 * 120 * 144 = 86164
T=51.941 [mS]
f=19.252 [Hz] 恒星時速度 (ハーフステップ)
基本定数=96 * 120 * 144 =1658880 NS-500のシステム基本定数です。
タカハシ NJP PD4-XY
赤道儀
赤経 ウオームホイル 240:1 伝達ギア比 3:1
モータ 48ステップ/1回転(フルステップ)
日本パルス PF5-48 G.H 1/125
NJP PD4/5/6 ・・・は恒星時駆動としてフルステップを使っています。
T * 48 * 125 * 3 * 240 = 86164
T=19.945 [mS]
f=50.136 [Hz] 恒星時速度 (フルステップ)
基本定数=(48 * 125 * 3 * 240)*2 =4320000*2=8640000 基本定数はハーフステップに換算してください。
赤緯 ウオームホイル 144:1 伝達ギア比 5:1
モータ 24ステップ/1回転(フルステップ)
SANRYUSHA P43G G.H 1/250
T * 24 * 250 * 5 * 144 = 86164
T=19.945 [mS]
f=50.136 [Hz] 恒星時速度 (フルステップ)
基本定数=(24 * 250 * 5 * 144)*2 =4320000*2=8640000
以上からNJPでは赤経、赤緯とも恒星時速度は、50.136PPS です。(フルステップ)
ハーフステップにすると、100.272PPSで恒星時駆動することができます。
一般的にステッピングモータは、フルステップよりもハーフステップ、低速よりも高速が低振動と言われています。
しかし、2相モータは 100 ? 200PPS に自己共振周波数が存在しますので注意が必要です。
共振周波数では、トルクの急激な減少と大きな振動が発生する場合があります。100.272PPSは問題ないと思います。
(2009,1/19 )
年頭の計画でご紹介しました 汎用2軸モータードライブ を作りました。
はじめは、NS-200の下位機種の予定でしたが、変更して
NS-500 の下位機種として扱うことにしました。
製品名は、DOG NS-100 にします。
NS-500から、初期設定と自動導入コマンドを除きました。
天体導入支援、天体自動導入はできません。また、星図上に視野枠(マーク)を表示できません。
しかし、その他のコマンド、機能はすべて有効です。
1 LX200、ASCOMに対応。Cartes du Ciel 、TheSky 、ステラナビゲータv6 その他からモータをコントロールできます。
2 オートガイダー対応、Webカメラ+パソコンによるオートガイド対応
3 NS-500 スピードテーブルに関係するすべての機能が有効です。基本定数を変えると他の赤道儀に対応します。
4 バックラッシュ補正有効
5 経緯台コントロール有効
6 フォーカサーコントロール有効 ・・・・・・・
また、NS-500へのグレードアップに応じます。ただし、グレードアップはファームウエア(NS-500システム)の更新とします。
お求め安い価格を実現するために、基板の状態で販売したいと思います。
そのため製作にはデジタル回路、電気について専門知識が必要になります。また、DOGにダメージを与える可能性がありますので、
リスクがあることを承知のうえでご購入をお願いします。技術的なサポートを行いたいと思います。NS-500回路図を提供する予定です。
近日発売です。
(2009,1/17 )
エンコーダ・アダプター、DOGナビゲータのサンプル出荷として、こちらに出しました。
興味あるお客様はご検討いただければ幸いです。
すこし様子をみてから、なるべく安価にして出したいと思っています。
エンコーダは、やはり潜在的な需要はそれほど多くないようです。モータの自動導入が一般的のようです。
エンコーダ信号の最高応答周波数は、特に明記してませんが、だいたい10KHzぐらいです。
もっと高速をご希望する場合は対応できます。
現状のシステムでは、直接関係のないモータドライバ機能等は活性化された状態にあります、
これを無効にすれば100KHz程度は比較的簡単に達成できると思います。
現状の10KHzは約0.0001秒のエンコーダ信号の変化をとらえることができます。
これをGPエンコーダにあてはめますと、1回転時間=0.0001*3000=0.3秒
つまり、最大288000(86400/0.3)倍速で、天体導入が可能ということになります。
NS-2000の開発から、すこし回り道になりますが、今回のDOGナビゲータ本体を利用して、
以下の製品を開発したいと思います。
1 DOG NS-12用 ASCOMアダプター
2 スカイセンサー3D用 ASCOMアダプター
このアダプターはDOGとSS3DをASCOMに対応させます。
つまり TheSky 、 Cartes du Ciel 、ステラナビゲータ v6 、そして ASCOM対応ソフトから、DOG
NS-12、スカイセンサー3Dを
天体自動導入可能にします。
また、DOGナビゲータ、エンコーダ・アダプターとASCOMアダプターは、同じハードを共用しますので相互にグレードアップできます。
なるべく早く開発する予定です。
DOGの方はいいのですが、スカイセンサー3Dの実機を持っていません。
どなたか、スカイセンサー3Dをお持ちの、以上のアダプターに興味のあるお客様がいらっしゃいましたらご連絡ください。
開発期間は1から2週間程度で済むと思います。その間SS3Dを貸してください。
詳しくはメールでお知らせしますが、製品化が完了しましたら実費で提供させていただきます。
よろしくお願いします。
(2009,1/15 )
DOG NS-500EM200 をご利用いただいている 東京都の小山様から、素晴らしい写真を送っていただきました。
少し長いですが、ご紹介させていただきます。
「オートガイドは、問題なく動作しており快適でした。
まあ、焦点距離が長くないのである意味気楽でした。
風が相当強く一部ぶれているコマもありましたが、、、
そこで、短時間露出のノータッチガイドも試してみました。
こちらは、ノイズ覚悟でしたが、思ったよりノイズが少なく
魔女の横顔を画像処理でうまく出せました。
ピントあわせは、試しにカメラのフォーカスエイドを使用しましたが
やはり実写で追い込んだほうが良いですね。
少しピントは甘いです。
それにしてもタカハシのFS60C+フラットナーはフルサイズの周辺まで
良像ですね!!
赤道儀:タカハシEM200+NS500
オートガイド:
<M31>
鏡筒:タカハシ FS60C+フラットナー
カメラ:Nikon D700ノーマル(フルサイズノートリミング)
ISO1600 5分露出×3枚合成
ガイド鏡:ミニボーグ60+2×バーロー
TO UCAM PROⅡ PHD Guiding Ver1.10
PCのパラレルポートより制御
ノータッチガイド:
<魔女の横顔(IC2118)>
鏡筒:タカハシ FS60C+フラットナー
カメラ:Nikon D700ノーマル(フルサイズノートリミング)
ISO6400 3分露出×5枚合成
ここまでくると、TOA130+NJPの構成と、FS60C+EM200等の2系統での
撮影が可能となり、目的に応じて楽しめます。」
(2009,1/7)
DOGナビゲータ NS-300 の取扱説明書の製作に手間取っています。
もう少しかかりそうです。お待ちください。その中に汎用エンコーダ アダプタの説明も加える予定です。
今日からビクセン社の製品を取り扱うことになりました。
ビクセンの望遠鏡、赤道儀からモーターなどのパーツまで全製品を取り扱います。
詳細な製品価格を掲載するまでもないと思っていますが、販売価格は他の天体望遠鏡専門店様と同じ特価で提供できます。
とくに2軸モータードライブ、天体自動導入装置DOG、オートガイダーVST・・・などと組み合わせたオリジナル製品を作ります。
最初の製品として、以下をご用意しました。(現在のところ当社の販売代理店はありません)
天体導入 DOG NS-200GP 2軸モータードライブ セット
・赤経、赤緯モーター MT-1WT 2個
・DOG NS-200GP (高速ドライバを内蔵しています)
・ハンドボックス付属
価格につきましては、お問い合わせください。(後日掲載します)
価格の目安として、DOG NS-200GPは、元々 DD-2(2軸コントローラー) の代わりとして開発をしていました。
(2009,1/3)
あけまして おめでとうございます。
昨年は新型の天体自動導入装置DOGを完成させたことは成果だったと思います。
しかし、まだまだいろいろなところで不十分だったように感じています。
今年は昨年の成果を活かしながら、なるべく広い視野と可能性をめざして取り組みたいと思います。
以下は年頭の計画です。図の黄色の部分が開発してあるものです。
昨年末にDOGナビゲータ NS-300 に続いて導入支援機能を持たない汎用エンコーダ アダプタを作りました。
これは、エンコーダのパルスを測定して、パソコン側で角度、変化を正確に知ることができる装置です。
それから DOGナビゲータ NS-300 は赤道儀用です。経緯台にはご利用いただけません。
将来、経緯台用も開発したいと思っています。どうすればよいか、少し下調べしましたが、三角関数、
球面三角法、ベクトル・・・昔勉強した記憶が微かにありますが忘れています。これはほとんど数学的問題のようです。
理解してからでないと応用が利きません、少しずつ勉強して解決したいと思います。
(2008,12/27 )
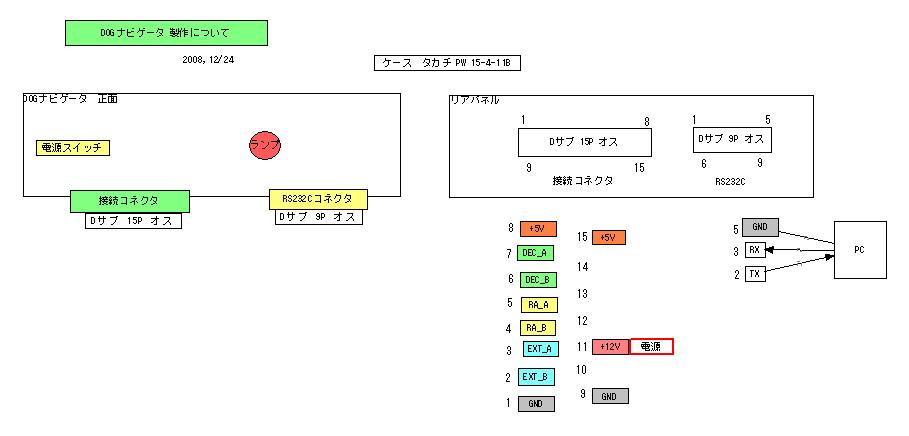
いい名前が思いつかないので、安直ですが DOGナビゲータ
NS-300 としました。
2,3日かけて試作機の製作と接続コネクタ信号配置、配線等について検討していました。
CPUボードは、もったいないですがNS-500を利用することにしました。
 |
 |
信号配置、コネクタ等は以下のように決めました。これらの仕様は、今後改良により変更する場合があります。
エンコーダ信号は、NS-500のオートガイド端子に入力しています。
システムは、DOG NS-500にエンコーダ機能を組みこんだ形で実現しました。
外から見ても分かりませんが、内部ではDOGが恒星時駆動の状態で、しっかり動いています。
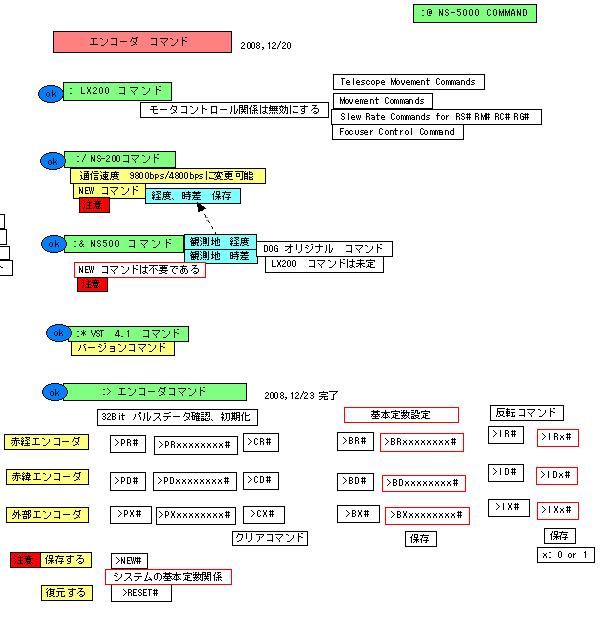
(2008,12/23 )
デジタル表示機の開発は完了したと思います。今日は色々な動作テストをしています。
導入支援 デジタル表示機 DOG NS-300 というような名前にしようと思います。
パソコンと接続して、ご利用いただくことができます。
LX200,NS-200,NS500などのコマンドに対応しますので、DOG
NS-500と同様に
Cartes du
Ciel、ステラナビゲータ、TheSky そしてASCOMの各種天文ソフトをご利用いただけます。
インクリメンタル方式(GPエンコーダ、パルステックエンコーダ・・・)のエンコーダであれば、ほとんどのメーカのものが使えます。
基本定数(32Bitデータ)を用意しましたので、どのような分解能(パルス数)でも対応できます。(最大42億パルス)
エンコーダのパルス測定やドームコントロールの準備として、エンコーダコマンドを作りました。
また、そのためのユーティリティソフトも作りました。
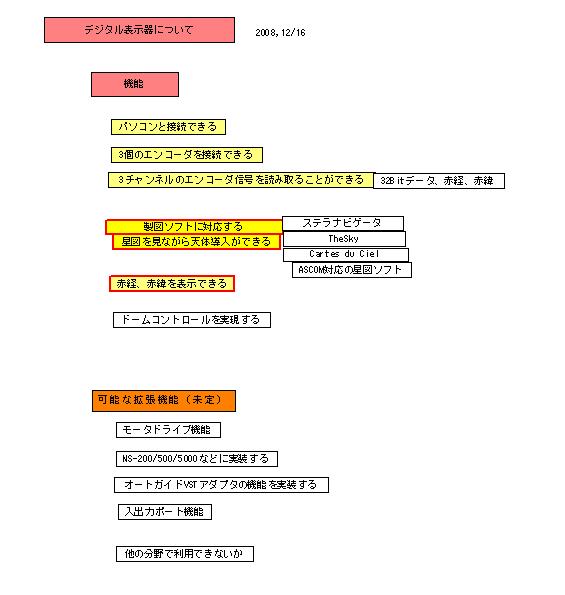
(2008,12/16 )
VST v5システムは以下の3つに分けて作ることにしました。
1 一定の周期でガイド星を検出する
2 ガイド星の位置を調べる
3 オートガイドを実行する
1,2の設計は終わりましたが、まだプログラミングしていません。3は検討中です。
エンコーダ入力処理が比較的簡単に作れそうだと思いましたので、こちらを先に開発することにしました。
基本的な目標はエンコーダによる天体導入支援、デジタル表示器のようなものです。
かつてDOG NS-10 という型番でデジタル表示器を製品化しました。これは、その上位機種になると思います。
まだまだプログラミングが必要なところが残っていますが、開発は以下のところまで進んでいます。
・赤経、赤緯、外部(主にドームコントロール用)の3チャンネルのエンコーダに対応します。
・エンコーダ信号を正確に、高速に検出できることを確認しました。
・星図ソフトCartes du
Cielで、年月日、時計、地方恒星時の初期化、初期設定(同期)ができました。
・パルステックエンコーダを使って、星図上の視野枠(マーク)が動くのを確認しました。
・正確な赤経、赤緯が表示できました。また、子午線を越えても正確に表示できました。
・基本定数を変更すると、分解能(パルス数)が異なるエンコーダに対応できることを確認しました。
なるべく早く製品化したいと思います。
参考までにデジタル表示については以下のとおりです。
製品や機能などについて、ご意見ご希望がございましたらメールを頂ければ幸いです。
(2008,12/6 )
NS-2000の開発については、まだ実質的なプログラミングに入っていません。そのための準備をしているところです。
プログラミングにかかせない割り込み処理、周辺モジュールを操作するために内部レジスタの仕組みを理解するのが大変です。
この辺はいつもながら非常に込み入って分かりづらいです。とくに16Bit
CPUはそのように感じます。
DOG NS-200/500のプログラミングは一部C言語を使い、大部分(80%以上)はアセンブリ言語で作成しました。
そのせいか8BitのNS-12に比べ、16Bit NS-500は圧倒的(体感速度)に速いと感じます。C言語だけではこのスピードは無理だと思います。
DOG NS-500CWで、最高速度13000PPSで駆動テスト(フルステップ、赤経)を行ったことがありましたが、簡単に動いてしまい驚いたことがありました。このスピードは、ビクセンのGP/SP赤道儀に置き換えると、約1300倍速に相当します。
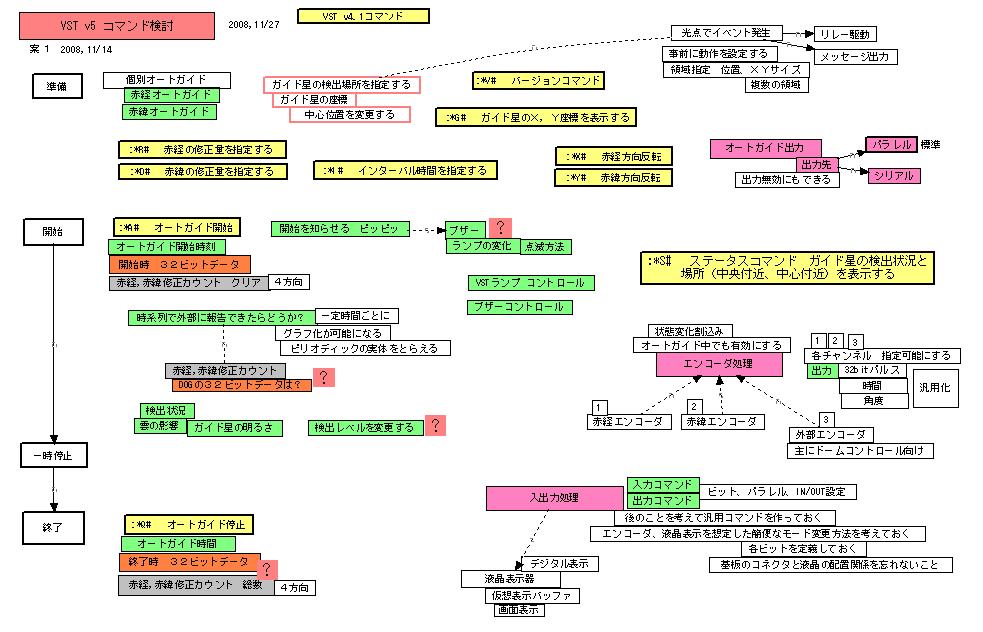
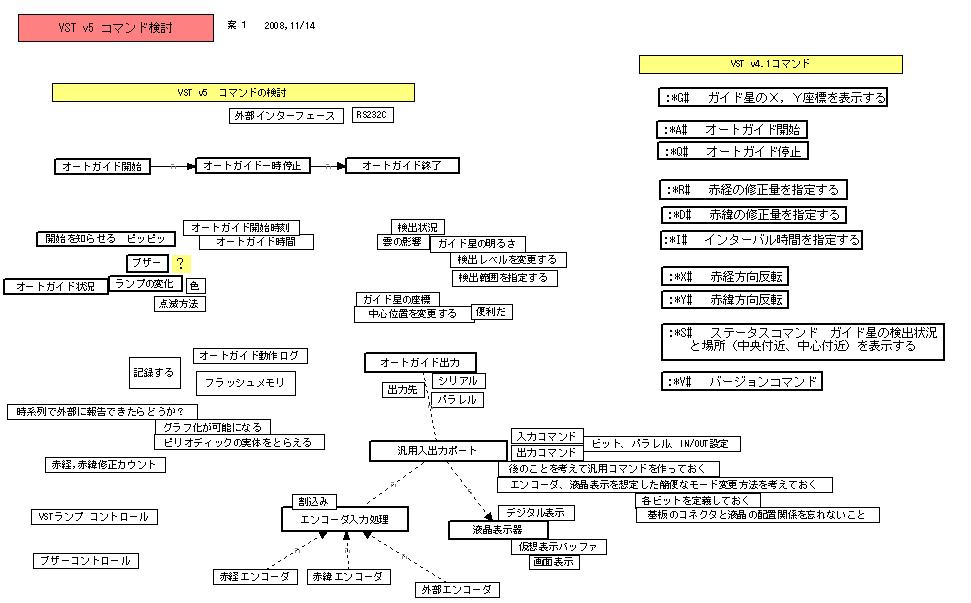
VST v5のコマンド(希望も含めて)については、今のところ以下のように考えています。
製品や機能などについて、ご意見ご希望がございましたらメールを頂ければ幸いです。
(2008,12/4 )
オートガイドVSTアダプターをご利用いただいている 群馬県の矢島様 から写真を送っていただきました。(11月23日)
見事な写真でした。ご紹介させていただきます。
以前はGuideMasterでしたが、現在はPHD Guidingを利用されているそうです。
それについては、
> PHD Guidingの成果はどうでしたか?また、GuideMasterと比べいかがですか?
「お陰様でGuideMasterに比べて操作性も簡便で、ガイドもしっかりと
やってくれる という印象です。
何しろ、扱いやすいのが良いですね。フリーソフトですし。
2週間ほど前にとったM45をお送りします。
BORG77ED Reducerなし ISO1600×5分×10枚 加算平均」
http://nskikaku.hp.infoseek.co.jp/ns5000_file/M45_yajima.jpg
EOS KissDX SEO-SP2 +DSI PRO+PHD
Guiding
アトラクス赤道儀(旧型)+オートガイドVSTアダプター
(2008,11/17)
NS-2000について検討しています。型番は2000または5000になるかも知れません。
基本はVST v4.1を移植することが第一の目標ですが想定するコマンドとそれに関連するシステムの条件について
事前に検討する必要があります。参考までにVST v5のコマンド(希望も含めて)は今のところ以下のとおりです。
VSTシステムは新規にプログラミンを始めるかわりに、NS-500システムをベースにして、独立したモジュールとして、
組み込む予定です。このほうが簡単になります。DOGには有用なサブルーチン(関数)が沢山ありますので、
これを利用して開発するほうが開発期間が短縮されます。
DOGはハンドボックスからのコントロールがなく、恒星時駆動の状態ですが、モータードライブと切り離した状態にします。
この方法は将来の可能性につながると思います。
それから図のエンコーダ入力処理については、VSTと関連性のある技術を使いますので、この際作ってしまおうと思います。
エンコーダ入力はデジタル表示器で使うものですが、これはDOGとかなりの部分でシステムが共通しています。
DOGではモータの回転に反映する32Bitデータというものがありますが、これをエンコーダ1回転の総パルス数に置き換え、
エンコーダの回転をそれに反映するようにすれば、デジタル表示器を作ることができます。
将来デジタル表示器が完成すると、エンコーダを付けた赤道儀で、赤経、赤緯を表示したり、星図ソフトCartes du
Cielの視野枠を見ながら手動操作で天体導入できるようになるでしょう。
(2008,11/13)
半年以上NS-2000の開発について検討しています。ここでいろいろとご紹介してきましたが、その度に内容が変化してきたと思います。
初めのうちはDOG NS-12をモデルにしてNS-2000をその上位機種として考えていましたが、NS-500を作ってから考えが変わりました。
NS-500は一時的なものと思っていましたが、実際にパソコンに向かい、星図を見ながら、天体自動導入したりしていると、
これがとても便利で興味深く使いやすいことに気づきました。今後の天体観測はこのようなシステムに発展すると思いました。
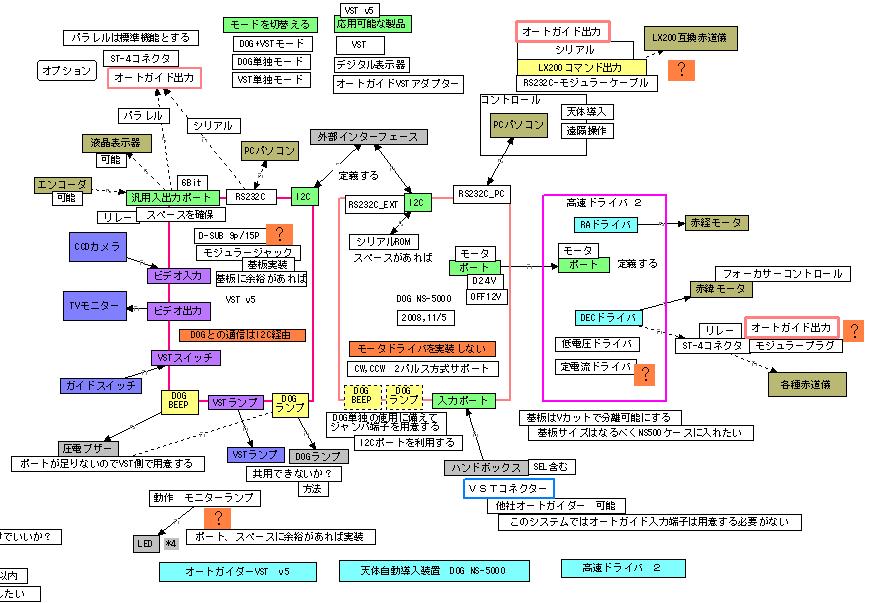
DOG NS-2000(型番は未定)は以上の方向性で下図のようにまとめてみました。現在のところこれがもっともしっくりしていて、
将来に応用が効く柔軟なシステムのように感じています。
すでに回路設計はほぼ終わっています。また、部品の用意もできましたので開発を進めたいと思います。
このホームページで公開するハードウエアー、ソフトウエアーなどの情報、
データ、その改造、応用したものの公開や営利目的の販売などをお断りします
[HOME]
{kind=link}
{kind=link}
{kind=link}