|
|
|
�V�̎����������u�@DOG�@NS-5000�@�J���� |
2011�N�̋L�^
2010�N
2009�N
2008�N
(2012,12/30)
��
NS-5000�p�v���O���~���O����Љ�܂��B
Tcl/Tk�Ń��[�e�B���e�B�v���O����������Ă��܂������A�����HSP�Ƃ�������ō��\��ł��B
HSP�͓��{���܂�̌���ł��B���S�҂ɂ�������₷���A�Q�[������p�I�ȃA�v���Ȃǂ���邱�Ƃ��ł��܂��B
http://hsp.tv/
HSP��NS5000�p�o�[�W�����A�b�v�v���O�������쐬�������Ƃ�����܂����A�\�����p�I�ȃA�v��������Ǝv���܂����B
�Ⴆ�AHSP�ŃX�s�[�h�e�[�u����ҏW������A���v��ݒ肵����A�ϑ��n�����m�F���邱�Ƃ��ł��܂��B
�܂��A�ԓ��V�̃��[�^���R���g���[��������A�V�̎����������邱�Ƃ��ł��܂��B
HSP�͋��͂ȃO���t�B�b�N�@�\�������Ă��܂�����A�ȒP�Ȑ��}�A�v���Ȃ琻�삪�\���Ǝv���܂��B
���ʂ�Tcl/Tk�̃��[�e���e�B�v���O������HSP�ō�蒼�������Ǝv���܂��B
�ȉ��́ANS-5000�p�̊ȒP�ȃv���O�����ł��B�v���O���~���O�̎Q�l�ɂ��Ă��������B
HSP_sample1
HSP_sample2
(2012,12/28)
��
����CPU��NS-5000���ڐA���܂��B
NS-5000��CPU�Ƃ���PIC24FJ64GA002
16MIPS ���g���Ă��܂��B
����ȊO�Ƀt�@�~��CPU�Ƃ��āA��葬���@PIC24H
40MIPS�A����PIC33
40MIPS
�Ȃǂ�����܂����A
�����ŋ߁A�V�^CPU������̂�m��܂����BPIC24E�V���[�Y�@70MIPS�ł��B
����͐���CPU�ł��B������PIC24F�̂S�{�ȏ�̃X�s�[�h�A�\�͂�����܂��B
������₷�������܂��ƁA���\�[�X�i�|�[�g�A�^�C�}�[�E�E�j���s�����Ă��܂����A���������A
�P��PIC24E�ŁA�܂Ƃ߂ĂR��̐ԓ��V�����������ł��邮�炢�̎��͂�����܂��B
�܂��A�v���O�������������ő�512KB�܂ŃT�|�[�g�����\��ł��B
PIC24F�ł́i�����p�b�P�[�W�Łj�ő�U�SKB�ł��B
�����x�݂���ڐA��Ƃ�i�߂�\��ł��B
���ꂪ��������A�ꕔ�n�C�u���b�h�^���[�^���g��NS-5000�ō��������\�ɂȂ�܂��B
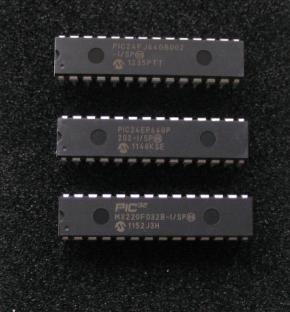
�ʐ^�́A
��@PIC24FJ64GB002�@bluetooth�A�_�v�^
���@PIC24EP64GP202�@NS-5000
���@PIC32MX220F032B
32Bit CPU (�s���z�u�͂قړ����A��ʌ݊���������܂�)
|
|
��
Atik
Filter
Wheel
���C�����܂����B
�̏Ⴕ���d����Filter
Wheel
�C���̂��˗�������܂����B
�d�����t�ڑ������悤�ŁAFilter
Wheel
�̓d�������̃p�[�c�������Ă��āA��p�^�[�����������n�f���Ă��܂����B
���CPU������A���ꂪ�_���[�W���Ă���ꍇ�͏C���s�\�ł����A��֕��i�ƌ������A�p�^�[�����C�����܂����B
�K���A���q�l����g�p�ł�����x�܂ŕ��������Ƃ��A�����܂����B
|
|
|
(2012,12/24)
��
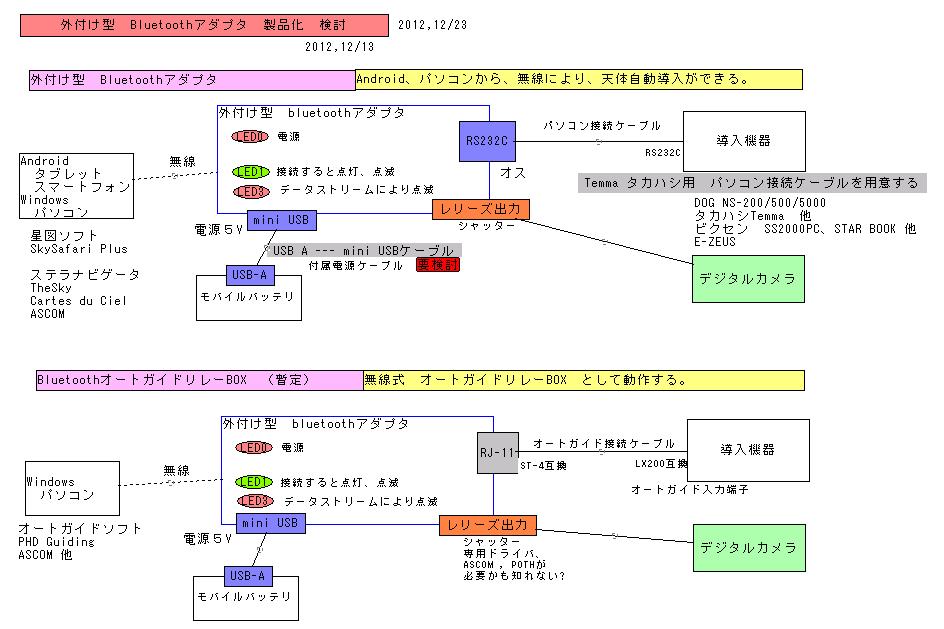
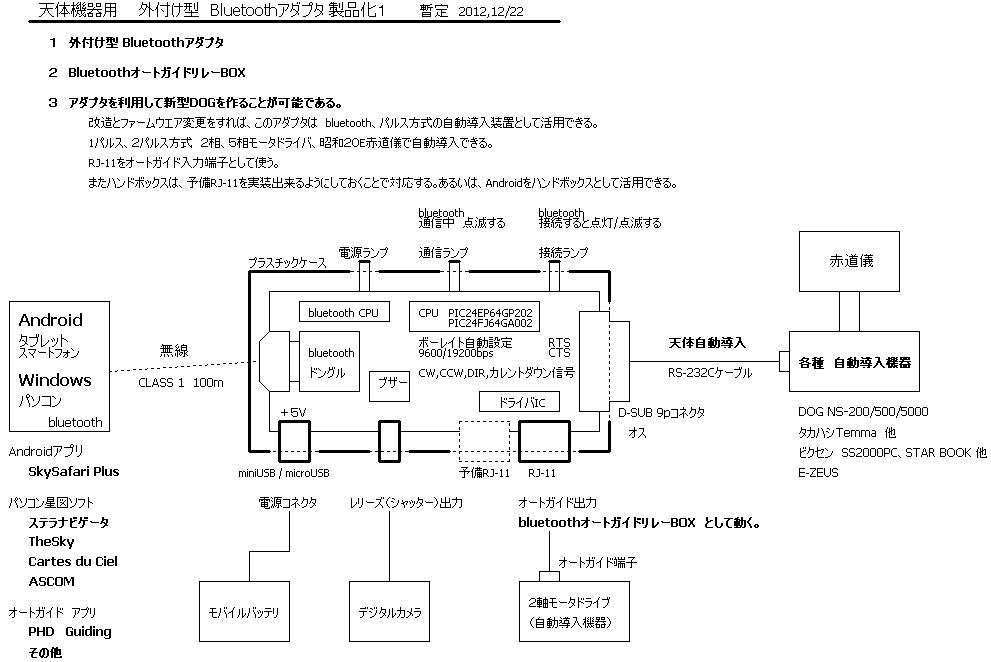
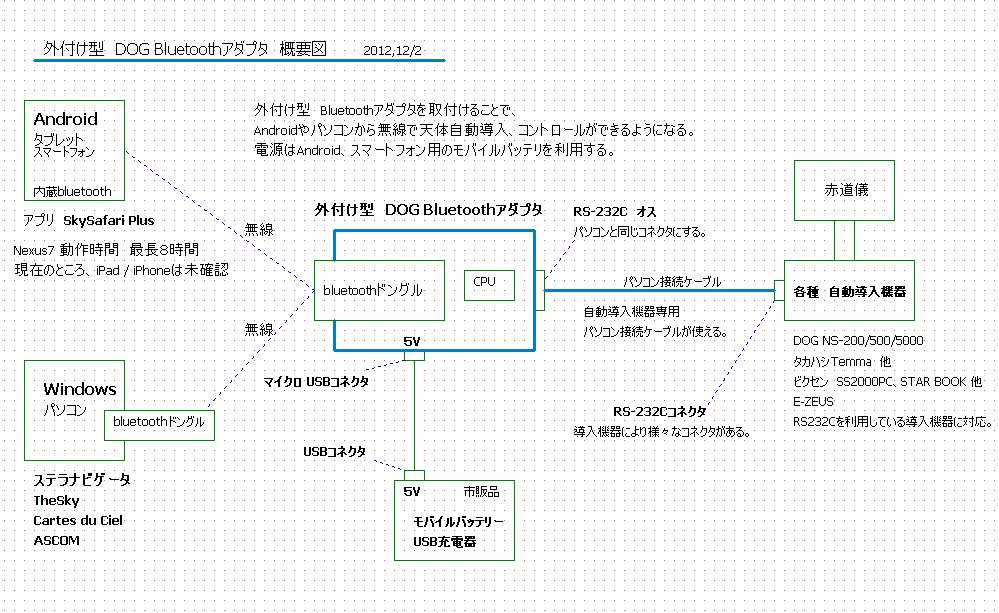
�O�t���^Bluetooth�A�_�v�^�̑����ł��B
��{�I�ȖڕW�́A�V�̗p��bluetooth�A�_�v�^�Ƃ��āAAndroid�A�p�\�R�����疳���Ŏ����������ł���悤�ɂ��܂��B
�����@��Ƃ��ẮADOG�̑��A�^�J�n�VTemma�A�r�N�Z��SS2000PC,START
BOOK�A�@E-ZEUS��z�肵�Ă��܂����A
�p�\�R���Ɛڑ����Ď����������ł���قƂ�ǂ̓����@��ɂ��Ή��ł��邾�낤�Ǝv���܂��B
�܂��A�����@�킪ASCOM�ɑΉ����Ă���ꍇ�́A�I�[�g�K�C�h���\�ł��B�i�����[BOX�͕K�v����܂���j
�����[�Y�o�͂́A�f�W�J�����R���g���[���ł��܂��̂ŕ֗����Ǝv���܂��B
RS232C�ʐM�X�s�[�h�͒ʏ�9600bps�ł����A�^�J�n�VTemma������19200bps�ł��B����ɂ��Ă͎����ݒ�őΉ�����\��ł��B
�����ݒ�\�X�s�[�h�́A4800/9600/19200/38400/115200bps��\�肵�Ă��܂��B
Bluetooth�I�[�g�K�C�h�����[BOX�́A�������������ł��B
����͎�ɁAASCOM�ɑΉ����Ă��Ȃ��Q�����[�^�h���C�u�p�ŁA�I�[�g�K�C�h���������邽�߂Ɍ������Ă��܂��B
�ʏ�̗L�����̃����[BOX�ɑ��A����͖������̃����[BOX�ƂȂ�܂��B
|
|
(2012,12/23)
��
�O�t���^Bluetooth�A�_�v�^���J������\��ł��B
�g���p��DOG
bluetooth�A�_�v�^�̎��ɁA���낢���Ȏ��������@��ɑΉ�����O�t���^Bluetooth�A�_�v�^�����܂��B
�����x�݂́A������肱����������܂��B
�Ȃ�ׂ����^�Ńv���X�`�b�N�P�[�X�ɓ������A��舵�����ȒP�ȁA�V�̋@��p��bluetooth�A�_�v�^����肽���Ǝv���܂��B
���ӌ��A����]�Ȃǃ��[�������肢���܂��B
|
|
(2012,12/5)
��
Bluetooth�A�_�v�^���J�����܂����B
�܂����͏��Ȃ��ł����s�̕i��DOG
bluetooth�A�_�v�^�Ƃ��āANS5000�ɑg�ݍ���ł��܂������A
�������ƃR�X�g���l���āA�V�K��Blutooth�A�_�v�^�̃n�[�h��v���\�t�g�����܂����B
�I�[�g�K�C�_�[VST���j�b�g�����̊��p���������܂������A��肭�����܂����B
CPU�ް�ނ̍�������VST���j�b�g���������镔���ł��BCPU��NS-5000�Ɠ���PIC24FJ64GA002�ł����A
�����USB���W���[�������^��PIC24FJ64GB002�ƌ������A�K�v�ŏ����̃n�[�h�C�������ŁABlutooth�A�_�v�^���������܂����B
�e�X�g�͗ǍD�ł��B
Android�^�u���b�gNexus
7�A�p�\�R�����疳���ŃR���g���[���A�����������ł���̂��m�F���܂����B
����ɂ��ANS-5000�ɓ����ł���ق��A�O�t���^Bluetooth�A�_�v�^������ł��܂��B
�O�t���^Bluetooth�A�_�v�^�́A�ėp��Bluetooth�A�_�v�^�Ƃ��āA���낢��ȃ��[�J�����������@��ɑΉ��ł���͂��ł��B
|
|
|
���ӌ��A����]�Ȃ����ł�OK�ł��������[�������肢���܂��B�Q�l�������Ē����܂��B
��
DOG
NS-5000
Ver5.25���ŐV�o�[�W�����ł��B
NS-5000�̓V�X�e���̉��ǂƈꕔ�o�O�̏C���������Ȃ��A����Ver5.25�ɂȂ��Ă��܂��B
Ver5.25�ł͎q�ߐ��ʉ߁@�x������L���A�����ɂł���悤�ɂ��܂����B
;
:=SMx# �q�ߐ��ʉ�
�x�����R�}���h �@(�`�����l���P�j�@�@�@�lj�
(2012,11/19)
;
:=SM0#�@�����ɂ���
;
:=SM1#�@�L���ɂ���
;
:=SM#
�m�F
Ver5.25�ł́A�قƂ�ǂ̃R�}���h��RS232C�@�Q�`�����l���ŗL���ɂ��܂������A����͓��ɏd�v�Ȃ��̈ӊO�̓`�����l���P�ɑg�ݍ��ޗ\��ł��B
���ꂩ��A
�X�s�[�h�e�[�u����ō����x�̕ύX�A�������f�[�^�A���[�e�B���e�B�\�t�g�Ŋe��p�����[�^���X�V�����ꍇ�́A
�Y�ꂸNEW#�R�}���h�����s���Ă���ċN�����邩�A��x�d����OFF�ɂ��Ă��������B����ɂ��m���ɍX�V�����f����܂��B
;
���u�[�g�R�}���h
�@
�@(2009,10/20)
;
:=R# �ċN������
;***
NS-5000
;Ver 5.26 2012,12/4---
���u�[�g���Ȃ��Ƃ�:&HSRxx#,:&HSDxx#�R�}���h�̌��ʂ������ɔ��f����悤�ɂ����B(18.5Kw)
;****
;Ver
5.25 2012,11/19 #:=SMx# �q�ߐ��ʉߌx�����R�}���h��lj������B
;
RS232C�`�����l��2�@boot_loader�ȊO�c��NS5000�R�}���h��L���ɂ����B
;Ver
5.24 2012,11/18 �����������~�A�ύX�ɂ��A�X�s�[�h��NO.�P�U�Œ�ɂȂ�s����C�������B
;Ver
5.23 2012,11/16 10Kpps�ȏ�̃X�s�[�h�̏ꍇ�A�R�}���h#:GR#
#:GD# �̃A���T�i�Ԍo�A�Ԉܒl�j�ɕs����o��̂����������B
;
����x16to10_2�@�Ȃ�repeat+���Z���߂Ŋ��荞�݂������Č��ʂ��s���ɂȂ����B
;
repeat�ł͊��荞�֎~�A�������͊��荞�݂�repeat���߂��g��Ȃ����ƁB
;
�i#:Gg#
#:Gt# #:GG# #:GC# #:GL# #:GS# #:&HSR# #:&HSD#�j
;Ver
5.22 2012,10/8-10/23
Android�Abluetooth�A�_�v�^�@�Ή��ɔ���RS232C�`�����l��2�ł�NS5000�R�}���h��L���ɂ����B
;
�쒆��i�q�ߐ��z���j�ɂ����鎩�������̕s����C�������B
;
�C�����e
<�q�ߐ��ʉ߉�,�������琼���֎q�ߐ����z���Ă���ꍇ�͌x������炷�悤�ɂ����B
;
�q�ߐ��ʉߌ�͐Ԍoraxxx_sss��n���P�����ɒu�������Ď������������������B
;
#:GS#�n���P�����R�}���h�A#:=BP#�o�C�p�X�R�}���h�̕s������������B
;
#:Sg DDD*MM# LX200���o�R�}���h�ɑΉ��������B
;
#:&Sg DDD*MM# NS5000���o�R�}���h�����̂܂ܗL���ł���B
;
#:SG�@+09.0#�@LX200�����R�}���h���쐬�������A�����̎��Ⴂ���������̂Ŗ����ɂ��Ă���B
;
������#:&SG+09.0#�@NS5000�����R�}���h�͂��̂܂ܗL���B(17.7Kw)
(2012,11/2)
��
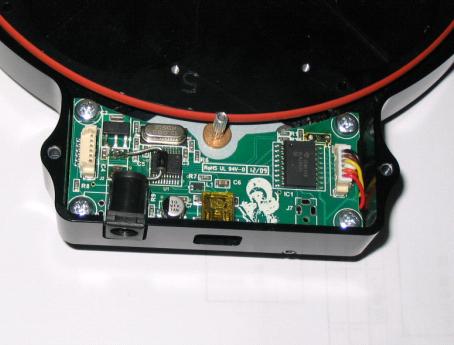
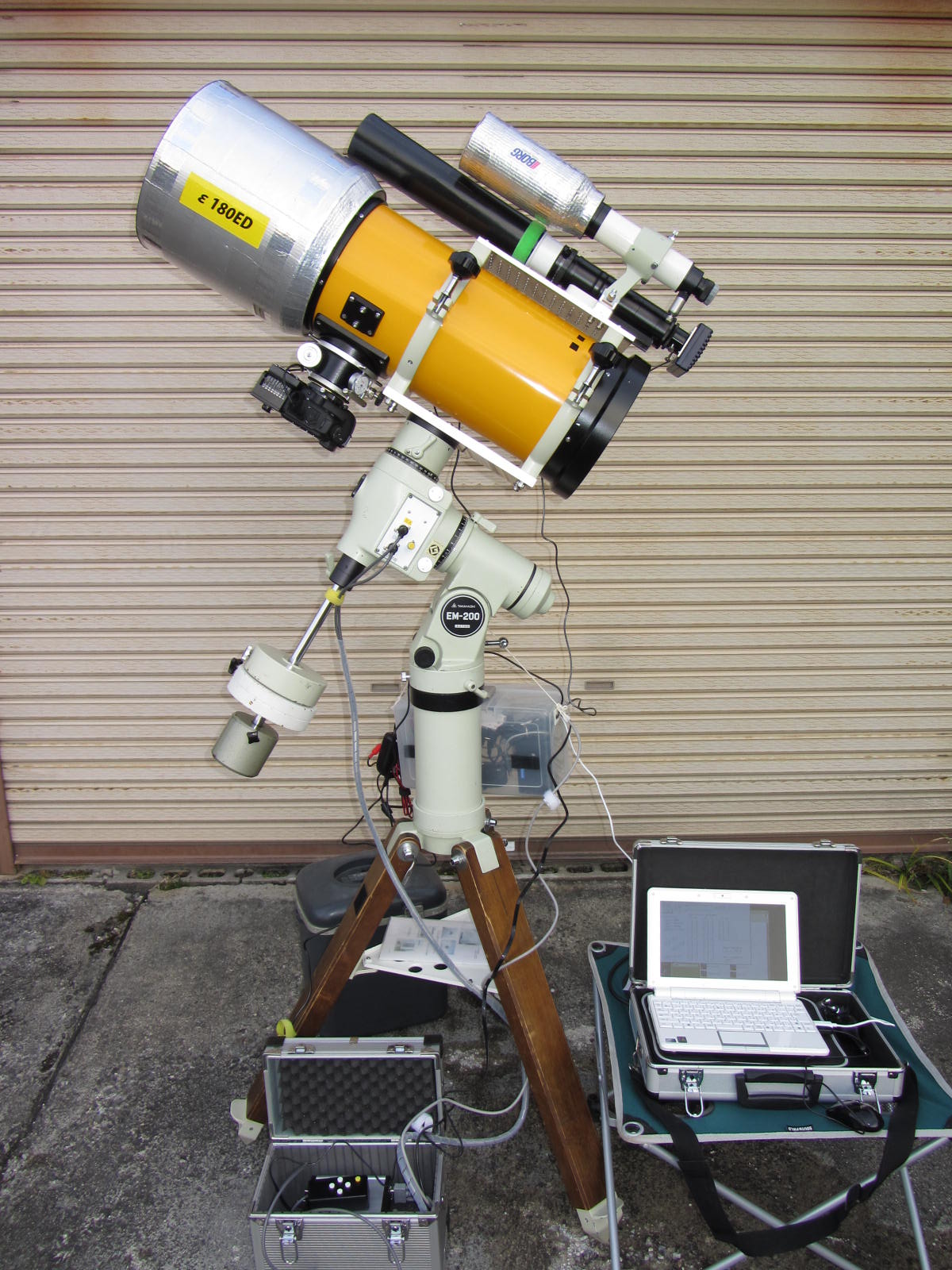
bluetooth�A�_�v�^��NS-5000�Ɏ�t���Ă݂܂����B
�ʐ^��NS-5000GP
Ver5.22�ł��B���q�l�i��t���j�̂���]��GP,EM200,NJP(Pyxis���[�^)�p�ɉ������܂����B
Bluetooth�A�_�v�^�̓I�[�g�K�C�h�[�q�̃��W�����[�W���b�N��ɃA�_�v�^�̃L�m�R�����܂�ڒ��܂ŌŒ肵�Ă݂܂����B
��W�����Ă��Ԃ��炸�A���ʂ̍L���͈͂�Android�Ɛڑ����o���܂����B���������������둤�ł͓d�g���キ�Ȃ�\��������܂��B
�����p��DOG�̐��ʑ��ŃR���g���[������̂������Ǝv���܂��B
|
|
|
(2012,10/25)
��
DOG
NS-5000
Ver5.22���J�����܂����B
Android�Abluetooth�A�_�v�^�̏����A�����NS-5000�̕s��̏C���A�ꕔLX200�R�}���h�����ǂ��邽�߂ɊJ�����܂����B
Ver5.22�͈ȉ����������܂����B
�P�@Android�Abluetooth�A�_�v�^�@�Ή��ɔ���RS232C�`�����l��2�ł�NS5000�R�}���h��L���ɂ��܂����B
�@�@����ɂ��
Android����NS5000�R�}���h�ɂ��R���g���[���i�����ݒ�E�E�j���ł���悤�ɂȂ�܂��B
�Q�@�쒆��i�q�ߐ��z���j�ɂ����鎩�������̕s����C�����܂����B
�@�@���q�l����̂��w�E�Ŏq�ߐ����z������ԂŎ�������������ƕs����o��\�������邱�Ƃ�������܂����B
�@�@
�@�@���q�l�̂��ӌ��A����]���Q�l�ɂ��āA�ȉ��̂悤�ɉ������܂����B
�@�@a
�]�������q�ߐ���ʉ߂���ƃu�U�[����܂��B�i�q�ߐ��ʉ߉��j
�@�@b
�]�������q�ߐ����z���Ă���ꍇ�A�x�������葱���܂��B��P�O�b�Ɉ�x�s�b�B
�@�@c
�q�ߐ��ʉߌ�̎��������A���]���������͈ȉ��̂Ƃ���ł��B
�@�@�@�@�q�ߐ�����O�Ɂi�����j�A�q�ߐ��̌������ցi�����j������������ꍇ�͔��]�����������s���܂��B
�@�@�@�@�P�����쓮��蓮�R���g���[���ɂ��A�q�ߐ����z���Ă��i�������琼���ցj���̂܂܊ϑ����p���ł��܂��B
�@�@�@�@�q�ߐ����z���Ă��鎞�A�]�����ʒu��蓌���̓V�̂�������������ꍇ�́A���]���������������s���܂��B
�@�@�@�@�������A�]�����ʒu��菭���ł�������������������ꍇ�́A���]�����������s���܂��B
�R�@#:GS#�n���P�����R�}���h�A#:=BP#�o�C�p�X�R�}���h�̕s����������܂����B
�@�@�o�C�p�X�R�}���h��Android�ƃp�\�R���őS��d�ʐM���ł��܂��B�o�C�p�X�I����ctrl-Z
(0x1A)�B
�S�@:Sg
DDD*MM# LX200���o�R�}���h�ɑΉ������܂����B����܂ł�#:&Sg
DDD*MM#
NS5000���o�R�}���h�����̂܂ܗL���ł��B
�@�@����ɂ��ϑ��n���̌o�x�A�ܓx�͐��}�\�t�g���玩���I�ɐݒ肳���悤�ɂȂ�܂����B�iSkySafari
Plus�A�X�e���i�rV9�Ŋm�F�j
�@�@#:SG�@±xx.x#�����R�}���h��p�ӂ��܂������A�����ɊԈႢ������A�����ɂ��Ă��܂��B����܂ł�NS5000�����R�}���h�͂��̂܂܂ł��B
��
Ver5.22�o�[�W�����A�b�v�v���O�������T�C�g�Ō��J�ł��Ȃ����e�X�g����\��ł��B
�U���Ƀo�[�W�����A�b�v�v���O�������쐬���悤�Ǝ��݂܂������A�ǂ����Ă��_���ł����B
������x����Ă݂܂��B�ȑO�Ɍ��J�����m�F�ς̃v���O�����������܂���ł����̂ŁA�e�X�g����PC�̌������l�����܂��B
���Â�WindowsXP���w�������̂ł�����x�����܂��B�������҂����������B
(2012,10/11)
��
�ɂ������Ȃ����̂�NS-5000CPU�{�[�h�𒍕����Ă��܂����B
�������Ă���CPU�{�[�h�����ׂ��܂����B�����ł���bluetooth�A�_�v�^���w�����܂����B
�ʐ^���͍������쒆��DOG
NS-5000PK264A2NJP�i�A�X�g���V���b�vAu�l���j�ł��B�������Ɋ�������Ǝv���܂��B
������DOG
NS-5000PK264A2NJP�i�I�[�g�K�C�_�[VST�����A�A�C�E�|�C���g�l���@�����s�j�ł��B������͊������Ă��܂��B

|
(2012,10/10)
��
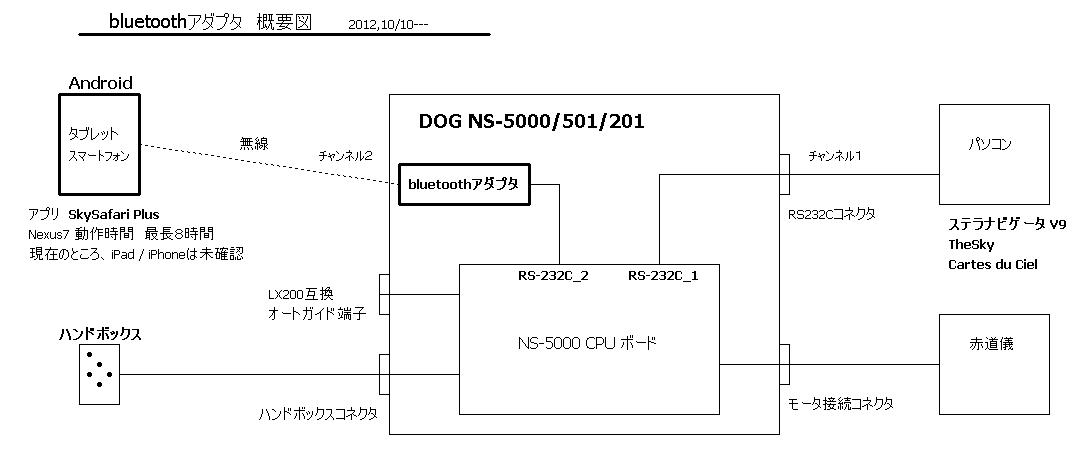
Android�́Abluetooth�A�_�v�^����āA�`�����l���Q�ڑ�����\��ł��B
NS-5000�͂Q�`�����l����RS232C�|�[�g������܂����A�`�����l���Q�iRS232C_2�ATTL���x���j��bluetooth�A�_�v�^��ڑ����܂��B
�`�����l�����Ɨ����������A�p�\�R�����g���Ă����Ԃ�Android��ڑ������ꍇ�ł��AAndroid�A�p�\�R�����玩�������A�n���h�{�b�N�X�ŃR���g���[�����\�ł��B
Ver4.21�܂ŁA�ȉ��̂悤�ȈႢ������܂����B�i�v���O�����������ߖړI�j
RS232C_1
ASCOM�R�}���h
(LX200)
�{
NS-5000�R�}���h
RS232C_2
ASCOM�R�}���h
(LX200)
�����Ń`�����l���Q��NS-5000�R�}���h���T�|�[�g���邱�Ƃɂ��܂��B����ɂ��Android���ł��S�ẴR�}���h���g����悤�ɂȂ�܂��B
���̂��߂̃o�[�W�����A�b�v�iVer4.22�j��Ƃ͂قڊ������Ă��܂��B�i�G���R�[�_�@�\�̕��͌�ɂ��܂��j
bluetooth�A�_�v�^�̏�����i�߂Ă��܂��B�ߓ������\��ł��B
|
(2012,10/7)
��
NS-5000��Andorid�^�u���b�g���ڑ��ł��܂����B
Android�^�u���b�g�Ƃ���amazon��Kindle
Fire���w���������ł��[�Ƒ҂��Ă����̂ł����ANexus7�������ɂȂ�A���q�l�̌��ʂ����āA
google�ɕύX���܂����B����ς�Android��google�̐��i�ł��A�����͂ɈႢ������܂��B
��������Nexus7���������āA��������SkySafari
Plus���C���X�g�[�����A�e�X�g���s���܂����B
���ʂ́A���ɊȒP�ɐڑ��A�����������ł��܂����BPC�̏ꍇ�ƂقƂ�Ǖς��܂���ł����B
�ȒP�ɐڑ����@��������܂��B
�P�@�ŏ��́Abluetooth�̐ڑ��ł́A�u�f�o�C�X�̌����v���^�b�`���܂��B������NS-5000�̓d�������܂��B�@�@
�@�@�����
�@�@NS5000-*******
�ƕ\������A�����I�����܂��B�i***�̓f�o�C�X�ԍ��ł��j
�@�@�uBluetooth�y�A�ݒ胊�N�G�X�g�v���\������܂��̂ŁA�p�X�L�[�iPIN�j”0000”����͂��A�uOK�v���^�b�`���܂��B
�@�@�����Android��NS-5000�̐ڑ����������܂��B
�@�@�ȍ~��NS-5000�̓d��������Ǝ����I�ɐڑ�����܂��B
�@�@
�Q�@���ɁASkySafari
Plus���N�����āASettings
-->Telescope -->Setup���J���܂��B
�@�@Scope
Type ---> Mead LX-200 Classic ��I�����܂��B
�@�@Mount
Type ---> Equatorial GoTo(German) ��I�����܂��B
�@�@Cmmunication
Settings → Connect via Bluetooth ��I�����܂��B
�@�@Readout
Rate -->2 per second ��I�����܂��B�i1�ł�OK�j
�@�@Set
Time & Location ��✔�������Ă���̂��m�F���Ă��������B
�R�@���������̑O�ɁA���}��ʂ�Connect
���^�b�`���܂��B
�@�@����ƁA��ʂɖ]�����ʒu�}�[�N���\������܂��B���̎�NS-5000�ɓ��t�A���������M����A�����I�ɏ���������Ă��܂��B
�@�@�i�ϑ��l���̓��o�A�ܓx�͎��O�ɐݒ肵�Ă����Ă��������BGPS������܂��̂Ő��m�ɓo�^�ł��܂����j
�@�@���ɁA�����ݒ�i�����AAlign�j����V�̂�I�����AAlign���^�b�`���܂��B
�@�@����ƁA�}�[�N���V�̂ɕ\������܂��B
�@�@���������́A�ڕW�V�̂�I�����Ă���Goto���^�b�`���܂��B�i��������Goto�{�^����Stop�ɕς��܂��j
�����ɁA�P�T���قǗ���Ď����������s���܂������A����͈��肵�Ă��܂����B
�e�X�g�̌��ʁAbluetooth�A�_�v�^�͎��p���ł���Ǝv���܂����B
���Ƃ́A���ۂ�NS-5000�{�̂ɑg�ݍ���Ԃœ���e�X�g���܂��B
|
|
|
|
(2012,10/5)
��
���q�l���Andorid�^�u���b�g���玩�������ł����Ƃ��A�����������܂����B
Andorid�^�u���b�g�Ƃ���google������Nexus
7���g���Abluetooth-RS232�A�_�v�^��NS-5000�ɊO�t�����āA
Android�A�v���Ƃ���SkySafari
Plus
����A�R���g���[���A�����������ł��܂����B
����ɂ��NS-5000��Android�ɑΉ��ł��邱�Ƃ�������܂����B�����炭Android�X�}�[�g�t�H���ł����v���Ǝv���܂��B
�܂��A�b�v����iPad
,iPhone
�ɂ��Ă��Abluetooth�͕W��������Ă��܂��̂ŁA�Ή��ł���\��������܂��B
���q�l�̃u���O�́@������ł��B
��
DOG
NS-201�̂��������܂����̂ŁA������@��Ver4.21�փo�[�W�����A�b�v���܂����B
NS-201GP��Ver4.13����o�[�W�����A�b�v���~�܂��Ă��܂������A�ŐV��NS-5000
Ver4.21���x�[�X�ɂ��ăo�[�W�����A�b�v���܂����B
���܂܂ł�NS-201
�́A
��{�萔�ύX�s�A�X�s�[�h�e�[�u���ύX�s�A�Ԍo�A�Ԉ܂Ōʂɍō����x�ύX�s�ȂǁA
���낢��Ȑ�����܂������A����A�����̐����S���~�߂邱�Ƃɂ��܂����B
NS-201��NS-501�́ANS-5000�ƈȉ��̂悤�ȊW�ɂȂ�܂��B
1�@NS-501
�}�C�N���X�e�b�v�@�\�������A���^�ԓ��V�p��NS-5000�ɑ������܂��B
2
NS-201 Ver4.21 �V�̎��������@�\�͂���܂��A�蓮�������o����NS-5000�ɑ������܂��B
DOG
NS-201
Ver4.21���o�[�W�����A�b�v���s���܂��B
����]�̂��q�l�́A�{�̂𑗂��Ă��������A�o�[�W�����A�b�v���ς܂��ĕԑ������Ă��������܂��B
���q�l�T�|�[�g�Ƃ��Ė����ł����Ȃ��܂����A�����͒������ł��肢���܂��B
(2012,9/30)
��
���a�Q�OE�ԓ��V�pDOG
NS-5000SHOWA20E
�̍P�������x�A��{�萔���Ԉ���Ă��܂����B(2012,8/19�Q��)
DOG��[�i���Ă���A���q�l���e�X�g�����Ƃ���A�P�����ǔ��A�����������啝�ɃY���邱�Ƃ�������܂����B
���̂��߂��q�l�̂����͂����������A�������s���A�����𖾂炩�ɂ��āA���̖����������邱�Ƃ��ł��܂����B
���݂͐���ɍP�����ǔ��A�����������ł��Ă��܂��B
�ǂ̗l�ɂ��Ă��̖������������̂��ȉ��ɐ������܂��B
����́A�Ⴆ�E�I�[���z�C�������A�`�B�M�A�䂪�s���̏ꍇ�ł��A�ȉ��̕��@���g���A���m�ȍP�������x�A��{�萔�����߂邱�Ƃ��ł��܂��B
�Q�l�ɂ��Ă��������B
(2012,9/2)
�J�V�I�y�A����βcas�i�J�t�j������Ƃ��ē������A
������Ƃ��Ĕ��܂����茎�Ƃ������܂����B
���̌��ʁA�Ԍo�Ɋւ��Ă͊p�x�ɂ��Ė�15�x�قlj߂��A
�Ԉ܂Ɋւ��Ă͖�1.5�x�قǖk�Ŏ����������������Ă��܂��܂��B
���̊���ɕύX���Ă��A���̓������o���܂���ł����B
(2012,9/12)
�{������A�P�����ǔ��e�X�g���s���܂����B
���̌��ʂȂ̂ł����A
NS-5000���q�����ꍇ�A
����̍P����50�{�Ŋϑ������5�����o�����ɒ��S���王��O�ւƈړ����܂��B
�ǂ����NS-5000�̒ǔ����x����������悤�ł��B
�����̃n���h�{�b�N�X�ɕς��Ă݂�ƁA
���S�ɋ������܂��B
NS-5000�Ə����n���h�{�b�N�X���ł́A
�P�����ǔ����̃��[�^�[��������Ă��܂��B
����ł͂��̂悤�Ȋ����ł��B
�ȏ�̂悤�Ȍ��ʂƂȂ�A�ƂĂ��g�����ԂłȂ����Ƃ�������܂����B
���[�^�͂R�T�O�{���Ő���ɋ쓮���ł��܂����̂ŁA�P�����A�����������Y���錴����NS-5000�̃p�����[�^�ɂ���܂��B
�Ⴆ�A�ԓ��V�̐Ԍo�A�Ԉ܂̃E�I�[���z�C���������z��ƈ���Ă���A����ȍP�����ǔ����ł����A�ɒ[�ɓ������x�������Ȃ�\��������܂��B
NS-5000SHOWA20E�́A�ȉ��̏�����ɂ��āA�������f�[�^���쐬�쐬���܂����B
(2012,7/3)
�Q0E�̎戵�������Ɓ�����1996�N4�����̏����W�߂Ă݂܂����B
�d����24V1A�A�������x��300�{���i�g�p�������j�A
�Ԍo�E�z�C�[�����a156mm�^����260���i�ȉ��������j�A
�Ԉ܁E�z�C�[�����a108�����^����180���A
�N���b�`�@�\�E�σt���N�V�������B
�����M�A�͓`�B�p�M�A�Ŕ����ɗ��Ƃ��Ă���i1/2�Ƃ������H�j…�ƋL�q������܂��B
�ȏ�̏��A�ȉ��̂悤�ɁA�P�������x�A��{�萔���v�Z���܂����B
1/8�����}�C�N���X�e�b�v�A���[�^�����M�A��9:1�͐ԓ��V�ׂĒ��ڊm�F���܂����B
�Ԍo
�v�Z
1�X�e�b�v�p1.8�K�A1/8�����A�����M�A��9:1�A�`�B�M�A��2:1�A�E�I�[���M�A260:1
�P�������x
86.904
pps
��{�萔
=
200 * 8 * 9 * 2 * 260 = 7488000 0x00724200
�Ԉ�
�v�Z
1�X�e�b�v�p1.8�K�A1/8�����A�����M�A��9:1�A�`�B�M�A��2:1�A�E�I�[���M�A180:1
�P�������x
60.165
pps
��{�萔
=
200 * 8 * 9 * 2 * 180 = 5184000
0x004F1A00
�e�X�g���ʂ���A���̌v�Z���e�ɊԈႢ������܂��B
�P�������x�͊�{�萔���猈�܂�A���������͊�{�萔����ɂ��č��W�n�����܂��������܂��B
���q�l�ֈȉ��̃��[���𑗂�܂����B
(2012,9/16)
��ς��s�ցA���S�z�����������āA�\����܂���B
����������܂����B
>
����̍P����50�{�Ŋϑ������5�����o�����ɒ��S���王��O�ւƈړ����܂��B
>
�ǂ����NS-5000�̒ǔ����x����������悤�ł��B
�P�������x�������Ƃ������Ƃł����A���{�I�Ȍ����͐ԓ��V�̃E�I�[���z�C�������A�܂��͓`�B�M�A�䂪�\�肵�Ă���e�ƈقȂ��Ă��邽�߂Ǝv���܂��B
DOG�ɂ͊�{�萔�Ƃ������̂�����A�������ɂ��āA�P�������x�A���W�n�̌v�Z�������Ȃ��Ă��܂��B
��{�萔�Ƃ́A�Ԍo�A�Ԉ����P��]�����邽�߂ɕK�v�ȃ��[�^�p���X�̑����̂��Ƃł��B
���[�^�p���X�����[�^�ɑ���ƍŏ��̂P�X�e�b�v��]���܂��B
�Ⴆ�A�Ԍo�̊�{�萔���̃p���X��Ԍo���[�^�ɑ���ƁA�ɂ߂Đ��m�ɁA�Ԍo���͂P��]�i�R�U�O�x�j���܂��B
��{�萔�͈ȉ��̌v�Z�����狁�߂Ă��܂��B
�Ԍo�@�@
���a�Q�OE�����V�i����j
���[�^1�X�e�b�v�p1.8�K�A1/8�����A���[�^�����M�A��9:1�A�`�B�M�A��2:1�A�E�I�[���M�A260:1
�P�������x
=
(200 * 8 * 9 * 2 * 260) / 86164 = 86.904 pps
��{�萔
=
(200 * 8 * 9 * 2 * 260) = 7488000
0x00724200�i�P�U�i���j
�����̃E�I�[���z�C��������`�B�M�A�ׂȂ��Ƃ��ADOG�ɗp�ӂ��Ă���A���[�e�B���e�B�\�t�g���g�����ƂŁA���ڊ�{�萔���m�F���邱�Ƃ��ł��܂��B
��ς��萔�ł����A�ȉ��Ɏ菇������������܂��̂ŁA���m�F�����˂������܂��B
�P�@�ԓ��V��NS-5000���Ȃ��ł��������B
�@�@NS-5000��RS232C�P�[�u����PC�Ɛڑ����Ă��������B�d����ON�ɂ���ƁA�����ɍP�����^�]���n�܂�܂��B
�Q�@�@�n���h�{�b�N�X�ōō����x�ɂ��Ă���A�Ԉ܃X�C�b�`�i�㉺�j�𑀍삵�ĐԈ܂���]�����Ă݂Ă��������B
�@�@�@�R�T�O�{���œ����܂�����A�P��]����r�I�Z���Ԃʼn��Ǝv���܂��B
�R�@�@���[�^���~���i�P�����^�]�̏�ԁj�Ă���A�o�b�ɂ����ā@���[�e�B���e�B�\�t�g�@NS200_Navigator_1_1.EXE�@���N�����Ă��������B
�@�@�@COM�ԍ��i�P�`�S�j�����킹�Ă���A�u�o�[�W�����R�}���h�v�̃{�^���������Ă��������B
�@�@�@�u�A���T�v�ɓY�t�̎ʐ^�̂悤�Ƀ^�C�g�����o�܂�����A����ɓ����Ă��܂��B
�S�@�@�u�R�}���h����͂��Ă��������v�@�̗��ɁA#:&XSYS1#�@���R�s�y���Ă���A�u�R�}���h���M�v�{�^���������Ă��������B
�@�@����ƁA�P�����^�]���~�܂�܂��B�i�ꎞ�I�Ɍo�ܑ䃂�[�h�ɂ��čP�������~�߂܂��j
�T�@�@#:&XRA#���R�s�y������A�u�R�}���h���M�v�{�^�����������������B
�@�@�@����Ɓu�A���T�v�ɐ������\������܂��B
�����@�@�@�Ԍo��{�萔�@�u�@�@�@�@�@�@�@�@�v�@�������L�^���Ă��������B
�U�@�@#:&XDEC#���R�s�y������A�u�R�}���h���M�v�{�^�����������������B
�@�@�@����Ɓu�A���T�v�ɐ������\������܂��B
�����@�@�@�Ԉ܊�{�萔�@�u�@�@�@�@�@�@�@�@�v�@�������L�^���Ă��������B
�V�@�@���ɁA�ԓ��V�@�Ԍo�A�Ԉ܂̖ڐ��Ɉ��t���Ă��������B
���������@�܂��Ԉ܂���ł��B
�W�@�@�@�����āA�u�Ԉ܃��[�^�p���X���v�{�^���������Ă��������B����Ɓu�A���T�v�ɐ������\������܂��B
�����@�@�@�X�^�[�g�ʒu�@�O°�@�u�@�@�@�@�@�@�@�@�v���L�^���Ă��������B
�@�@�@��]�����͂ǂ���ł����܂��܂���B�n���h�{�b�N�X�Ԉ܂̃{�^���������āA��X�O°��]���Ă��������B���������Ō��\�ł��B
�@�@�@�u�Ԉ܃��[�^�p���X���v�{�^���������Ă��������B
�����@�@�@�ʒu�@�X�O°�@�u�@�@�@�@�@�@�@�@�v�@�������L�^���Ă��������B
�@�@�@��P�W�O°��]���Ă��������B���������Ō��\�ł��B
�@�@�@�u�Ԉ܃��[�^�p���X���v�{�^���������Ă��������B
�����@�@�@�ʒu�@�P�W�O°�@�u�@�@�@�@�@�@�@�@�v�������L�^���Ă��������B
�@�@�@��Q�V�O°��]���Ă��������B���������Ō��\�ł��B
�@�@�@�u�Ԉ܃��[�^�p���X���v�{�^���������Ă��������B
�����@�@�@�ʒu�@�Q�V�O°�@�u�@�@�@�@�@�@�@�@�v�������L�^���Ă��������B
�@�@�@�P��]���āA��̈ʒu�Ŏ~�߂Ă��������B�@�Ȃ�ׂ����m�ɁB
�@�@�@�u�Ԉ܃��[�^�p���X���v�{�^���������Ă��������B
�����@�@�@�ʒu�@�R�U�O°�@�u�@�@�@�@�@�@�@�@�v�������L�^���Ă��������B
���������@���́A�Ԍo�ł��B�Ԉܑ̂Ɛԓ��V�̐ڑ��J�[���P�[�u�����ז��ɂȂ�܂����A��肭�H�v���āA�P��]�̃f�[�^�����肢���܂��B
�X�@�@�@�����āA�u�Ԍo���[�^�p���X���v�{�^���������Ă��������B����Ɓu�A���T�v�ɐ������\������܂��B
�����@�@�@�X�^�[�g�ʒu�@�O°�@�u�@�@�@�@�@�@�@�@�v���L�^���Ă��������B
�@�@�@��X�O°��]���Ă��������B���������Ō��\�ł��B
�@�@�@�u�Ԍo���[�^�p���X���v�{�^���������Ă��������B
�����@�@�@�ʒu�@�X�O°�@�u�@�@�@�@�@�@�@�@�v�@�������L�^���Ă��������B
�@�@�@��P�W�O°��]���Ă��������B���������Ō��\�ł��B
�@�@�@�u�Ԍo���[�^�p���X���v�{�^���������Ă��������B
�����@�@�@�ʒu�@�P�W�O°�@�u�@�@�@�@�@�@�@�@�v�������L�^���Ă��������B
�@�@�@��Q�V�O°��]���Ă��������B���������Ō��\�ł��B
�@�@�@�u�Ԍo���[�^�p���X���v�{�^���������Ă��������B
�����@�@�@�ʒu�@�Q�V�O°�@�u�@�@�@�@�@�@�@�@�v�������L�^���Ă��������B
�@�@�@�P��]���āA��̈ʒu�Ŏ~�߂Ă��������B�@�Ȃ�ׂ����m�ɁB
�@�@�@�u�Ԍo���[�^�p���X���v�{�^���������Ă��������B
�����@�@�@�ʒu�@�R�U�O°�@�u�@�@�@�@�@�@�@�@�v�������L�^���Ă��������B
�ȉ��ɂ܂Ƃ߂Ă��L����A���m�点���������B
�����@�@�@�Ԍo��{�萔�@�u�@�@�@�@�@�@�@�@�v�@�������L�^���Ă��������B
�����@�@�@�Ԉ܊�{�萔�@�u�@�@�@�@�@�@�@�@�v�@�������L�^���Ă��������B
�Ԉ�
�����@�@�@�X�^�[�g�ʒu�@�O°�@�u�@�@�@�@�@�@�@�@�v
�����@�@�@�ʒu�@�X�O°�@�@�u�@�@�@�@�@�@�@�@�v
�����@�@�@�ʒu�@�P�W�O°�@�u�@�@�@�@�@�@�@�@�v
�����@�@�@�ʒu�@�Q�V�O°�@�u�@�@�@�@�@�@�@�@�v
�����@�@�@�ʒu�@�R�U�O°�@�u�@�@�@�@�@�@�@�@�v
�Ԍo
�����@�@�@�X�^�[�g�ʒu�@�O°�@�u�@�@�@�@�@�@�@�@�v
�����@�@�@�ʒu�@�X�O°�@�@�u�@�@�@�@�@�@�@�@�v
�����@�@�@�ʒu�@�P�W�O°�@�u�@�@�@�@�@�@�@�@�v
�����@�@�@�ʒu�@�Q�V�O°�@�u�@�@�@�@�@�@�@�@�v
�����@�@�@�ʒu�@�R�U�O°�@�u�@�@�@�@�@�@�@�@�v
�ȏ�̃f�[�^���̂��Ă���������Όv�Z���Ċ�{�萔�����߂邱�Ƃ��ł��܂��B
���萔�ł�����낵�����肢���܂��B
NS���@����
���q�l���炲�Ԏ����܂����B
(2012,9/17)
����e�X�g���������܂����̂ŁA
���ʂ𑗐M�������܂��B
��{�萔�͏����l����ύX�������Ă���܂���B
>
�����@�@�@�Ԍo��{�萔�@�u�O�O�V�Q�S�Q�O�O���v�@�������L�^���Ă��������B
>
�����@�@�@�Ԉ܊�{�萔�@�u�O�O�S�e�P�`�O�O���v�@�������L�^���Ă��������B
>
>
�Ԉ�
>
�����@�@�@�X�^�[�g�ʒu�@�O°�@�u�O�O�S�c�T�P�O�X���v
>
�����@�@�@�ʒu�@�X�O°�@�@�@�@�u�O�O�R�c�W�O�b�R���v
>
�����@�@�@�ʒu�@�P�W�O°�@�@�@�u�O�O�Q�c�a�P�P�c���v
>
�����@�@�@�ʒu�@�Q�V�O°�@�@�@�u�O�O�P�c�d�X�a�`���v
>
�����@�@�@�ʒu�@�R�U�O°�@�@�@�u�O�O�O�d�O�`�O�W���v
>
>
�Ԍo
>
�����@�@�@�X�^�[�g�ʒu�@�O°�@�u�O�O�V�P�e�d�W�Q���v
>
�����@�@�@�ʒu�@�X�O°�@�@�@�@�u�O�O�U�Q�R�W�a�P���v
>
�����@�@�@�ʒu�@�P�W�O°�@�@�@�u�O�O�T�Q�T�d�b�a���v
>
�����@�@�@�ʒu�@�Q�V�O°�@�@�@�u�O�O�S�Q�W�W�X�X���v
>
�����@�@�@�ʒu�@�R�U�O°�@�@�@�u�O�O�R�Q�a�X�T�e���v
>
�A���T�l�͈ȏ�̗l�ɂɂȂ�܂����B
��낵�����肢�������܂��B
�f�[�^���������Ă���ȉ��̃��[���𑗂�܂����B
(2012,9/17)
���҂������܂����B
���A�l�ŁA��������ɒ������Ă����������f�[�^����A���m�Ȋ�{�萔�����������Ǝv���܂��B
���ʂ͐Ԍo�A�Ԉ܂Ƃ��ɓ����P�������x�ŁA������{�萔���Ǝv���܂��B
NS-5000�ł͖�肠��܂��A��ʓI�ȂQ�����[�^�h���C�u�ł́A�Ԍo�A�Ԉ܂��ʁX�̑��x�ł͍��������ƂɂȂ�܂��B
�ŏ��̑z��ł́A�Ԍo86pps
�Ԉ�60pps�ł����B������������͂����������Ƃł����B
�`�B�M�A�䂠�邢�̓E�I�[���z�C������������Ă���悤�ł��B
�v�Z���ʂ́A�ȉ��̒ʂ�ł��B
>
�Ԉ�
>
�����@�@�@�X�^�[�g�ʒu�@�O°�@�u�O�O�S�c�T�P�O�X���v�@�@5067017
0
0
>
�����@�@�@�ʒu�@�X�O°�@�@�@�@�u�O�O�R�c�W�O�b�R���v
4030659
-1036358
>
�����@�@�@�ʒu�@�P�W�O°�@�@�@�u�O�O�Q�c�a�P�P�c���v
2994461
-1036198
>
�����@�@�@�ʒu�@�Q�V�O°�@�@�@�u�O�O�P�c�d�X�a�`���v
1960378
-1034083
>
�����@�@�@�ʒu�@�R�U�O°�@�@�@�u�O�O�O�d�O�`�O�W���v
920072
-1040306 -4146945�@�@0x003F4701
�@�@�Ԉ�
90°���σp���X=4146945
/ 4=1036736.25�p���X�@��L���ʂ��琳�����Ɣ��f�ł���
��������DEC�v�Z
1
�`�B�M�A���
x
�Ƃ��ċt�Z���Ă݂�
1�X�e�b�v�p1.8�K�A1/8�����A�����M�A��9:1�A�`�B�M�A��x:1�A�E�I�[���M�A180:1
��{�萔
=
(200 * 8 * 9 * x * 180) = 4146945 0x003F4701
x
= 1.59990 ----->1.6 �̉\��������B
��������DEC�v�Z�Q
�`�B�M�A��� 1.6
�Ƃ��Čv�Z���Ă݂�
1�X�e�b�v�p1.8�K�A1/8�����A�����M�A��9:1�A�`�B�M�A��1.6:1�A�E�I�[���M�A180:1
�Ԉ܁@��{�萔
=
(200 * 8 * 9 * 1.6 * 180) = 4147200
0x003F4800
�������ʂ̂R�U�O°�̃p���X4146945
�Ɗ�{�萔�Ƃ̌덷���v�Z���Ă݂��
(4147200
- 4146945) / 4146945 *100 = 0.006% �덷�͖����o����قǏ�����
����āA
�Ԉ܁@�P�������x
=
(200 * 8 * 9 * 1.6 * 180) / 86164 = 48.131 pps
>
�Ԍo
>
�����@�@�@�X�^�[�g�ʒu�@�O°�@�u�O�O�V�P�e�d�W�Q���v
7470722
0
0
>
�����@�@�@�ʒu�@�X�O°�@�@�@�@�u�O�O�U�Q�R�W�a�P���v
6437041
-1033681
>
�����@�@�@�ʒu�@�P�W�O°�@�@�@�u�O�O�T�Q�T�d�b�a���v
5398219
-1038822
>
�����@�@�@�ʒu�@�Q�V�O°�@�@�@�u�O�O�S�Q�W�W�X�X���v
4360345
-1037874
>
�����@�@�@�ʒu�@�R�U�O°�@�@�@�u�O�O�R�Q�a�X�T�e���v
3324255
-1036090 -4146467
0x003F4523
�Ԍo�@90°���σp���X=4146467
/ 4=1036616.75�p���X
��������RA�v�Z
1
�`�B�M�A���
x
�Ƃ��ċt�Z���Ă݂�
1�X�e�b�v�p1.8�K�A1/8�����A�����M�A��9:1�A�`�B�M�A��x:1�A�E�I�[���M�A260:1
��{�萔
=
(200 * 8 * 9 * x * 260) = 4146467
0x003F4523
x
= 1.10749
��������RA�v�Z�Q
DEC�v�Z�Q����ARA�̊�{�萔��DEC�Ɠ����Ɖ��肵�Ă݂�ƁA
�Ԍo�@��{�萔
=
4147200 0x003F4800�@����
�������ʂ̂R�U�O°�̃p���X4146467
�Ɗ�{�萔�Ƃ̌덷���v�Z���Ă݂��
(4147200
- 4146467) / 4146467 *100 = 0.017%
�덷�͏�����
����āA��{�萔�͐Ԉ܂Ɠ������Ɛ���ł���B
�䂦�ɁA
�Ԍo�@�P�����ǔ����x
=
4147200 / 86164 = 48.131
pps
�ȏォ��A���a�Q�OE�ԓ��V�̐Ԍo�A�Ԉ܂̊�{�萔�͓����ŁA�P�������x��48.131
pps
�Ɛ��肷��B
�Ԍo���i�Ԉ܂̉\��������j�̃E�I�[���z�C�������A�`�B�M�A��͑z��ƈ���Ă������v����B
�ȏ�̌��ʂ��A�V�����������f�[�^���쐬���܂����B
�Y�t�t�@�C���́@DOG_renew_***.txt�@���n�C�p�[�^�[�~�i���Ȃǂ�NS-5000�֑����Ă��������B
�O�̂��߁A��x�d������Ă���A�Ăѓd�������A���[�e�B���e�B�\�t�g�@DOG_BACKUP3.tcl�@���̂��Ă��������B
DOG_�ݒ��������o�^����Ă����OK�ł��B
���ꂩ��A�K�C�h�X�s�[�h�ł����A�P�������x��48pps�ƒ�߂ł����̂ŁA
����0.4�{��
�A����0.5�{���@�ɂȂ��Ă��܂��B�i����0.5�͏o���܂���ł����j
���x�̓R�}���h�Œ������\�ł��B
��낵�����肢���܂��B
NS���@����
�������f�[�^�i�p�����[�^�j�ύX��A���q�l��育�A�������������܂����B
(2012,9/19)
���܂�̒��A����e�X�g���������܂����B
���ʂ͗ǍD�ł��B
�P�����^�]���Z���Ԃł͂���܂��������Ȃ��A
�X�e���i�r9�ł̎�����������肠��܂���ł����B
���肪�Ƃ��������܂����B
���q�l���烁�[�������������܂����B
(2012,9/23)
����̌��ł͐F�X�Ƃ����b�ɂȂ�܂����B
���g�̕����l�̖��ɗ����킩��܂��ǁA
�������Ă��������܂��B
���g�̊ϑ��n�͓ޗnj��̖k�����ɂ��铌�M�M�V����ł��B
Google
map��ł�34.6064,135.70519�Ɉʒu���܂��B
����̒���ɂQ�D�T�l�l���̃X���C�f�B���O���[�t�̓V��������삵�A
SHOWA_�Q�OE�����Ă���P�U�N�ڂ��}���܂��B
�r�����^�C�����Ԃ�����傫�ȓV�����ێ��̂݉ғ������Ă���ł����B
�ŋ߂ɂȂ�Ăѐ������邱�Ƃ��o������������܂����̂ŁA
�ԓ��V�̎��������̓������l���n�߂܂����B
�R�X�g�p�t�H�[�}���X�E�A�t�^�[�P�A�E����̔��W�������l���I���ʂ�
NS��悳���NS-5000�ł����B
NS��悳��̕��ł����߂Ĉ����ԓ��V�̂悤�ŁA
���x�������l�ƃ��[���Ŋm�F��Ƃ��J��Ԃ��A
�O��̎����������o����悤�ɂȂ�܂����B
�ԓ��V�{�̂��S���̖������Ő��삢����������ɁA
�e�ؒ��J�ő����Ή��ő�ϖ������Ă���܂��B
�Y�t�̎ʐ^��
�P�A�J�V�I�y�A�E�J�t�i�������j
�Q�A�y���Z�E�X
�R�A�A���h�����_�E�A���}�N
�S�A�A���h�����_�E�A���t�F���b�c
�T�A�݂Ȃ݂̂����E�t�H�[�}���n�E�g
�U�A�킵�E�A���^�C��
�V�A���ƁE�x�K
�W�A�A���h�����_�EM31
�X�A�J�V�I�y�A�E�J�t�i�������ɖ߂�j
�ȏ�A�Q�O�����V���~�J�Z�AF5���f���[�T�[�ANIKON_D3�AISO_1600�A�I�o5�b
�J�V�I�y�A*�J�t�ŏ����ݒ�i�����j���Ă��玩���������Ă��܂��B
|
|
|
|
|
|
|
|
|
|
���q�l�������a�Q�OE�pNS-5000SHOWA20E
�̓���𑗂��Ă��������܂����B
x350�{�����������ł��B�ԓ��V�͉������Ă��܂���B
http://www.youtube.com/watch?v=MzeyygHhDpw
��
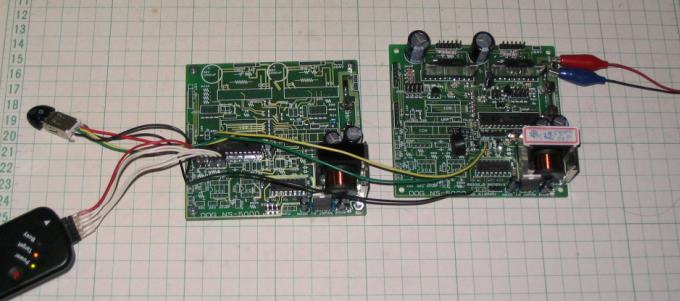
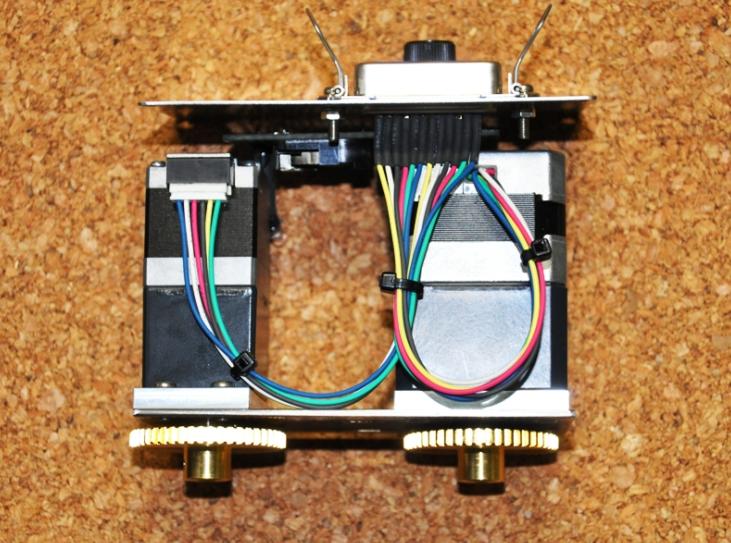
�p�\�R�����疳���ibluetooth�j��NS-5000�Ɛڑ��ł��܂����B
�s�̂�bluetooth�A�_�v�^���g���āA�ʐ^�̗l��NS-5000�ɂȂ��Ńe�X�g�������Ȃ��܂����B
���ʂ͖�肠��܂���ł����B�X�e���i�r�Q�[�^Ver9���琳��ɃR���g���[���A���������ł��܂����B
����ɂ��NS-5000�́A�L���iUSB-RS232C�ϊ��P�[�u���{RS232C�P�[�u���j�̑��ɁA�����ibluetooth�j�ł��Ή��ł��邱�Ƃ�������܂����B
�s�̂̃A�_�v�^��bluetooth�h���O��BT-MicroEDR1X���ڂ��Ă��܂��B
�܂�PC���ɂ������h���O����t���܂����B�ڑ�����Ǝ����I��PC����COM40������܂����B
�X�e���i�r�Q�[�^��COM40��OK�ł������A
Cates
du Ciel
��COM1-8�ANS-5000���[�e�B���e�B�\�t�g��COM1-4�܂łŁACOM40�Ɛڑ��ł��܂���B
USB-RS232C�ϊ��P�[�u���ł��A��������COM�ԍ������ɂȂ�܂��B
 Bluetooth�A�_�v�^��RS232C_2�i�`�����l���Q�@TTL���x���j�ڑ����Ă��܂� |
��
JP,NJP�p�E�G�C�g���V���t�g�S�O�Omm�����܂����B
���q�l����̂��˗��ŏ�����蒷���X�e�����X���E�G�C�g���𐧍삵�܂����B���x�͏\������܂��B
���i�����܂��B����]������ΐ��삢�����܂��B�i���P�X�W�O�O�j

|

|

|
(2012,9/17)
��
���q�l���B�e���ꂽ��������Љ�܂��B
�e�n�̐��܂�ɎQ������Ă��܂��̂ł����ɂȂ������q�l��������Ǝv���܂����ANS-5000PK264A2NJP�ɂ�鎩�������ł��B
�����@http://video.fc2.com/content/201208294UebZdvq
���q�l�̃u���Ohttp://kishikero.blog.fc2.com/blog-entry-216.html�@
��
DOG��RS232C���Q�`�����l�������邱�Ƃ��o���܂����A���̗��p���@�ɂ��ă��[�������������܂����B�Q�l�ɂ��Ă��������B
RS232C�|�[�g�̒lj��̓I�v�V�����ł��BDOG�̕���NS-5000PK264A2NJP�ł��B
(2012,8/27)
����DOG��Serial��2�|�[�g�Ɋg�����āA��������������ɁA
������PHDGuiding�̃K�C�h�|�[�g�Ƃ��Ďg�p���Ă��܂��B
���ɁA�|�[�g���ւ��邱�Ƃ������֗��Ɏg���Ă��܂��B
�i�K�C�h�̉����������̂Ƃ����肠��܂���j
ASCOM��1�|�[�g���V�F�A������@������܂����A
���܂��g���Ȃ������̂ł��̂悤��2�|�[�g�𗘗p���Ă��܂��B
�������ŁA�K�C�h�p�����[���u�͎g�����Ƃ��Ȃ��Ȃ�܂����B
�ȑO�g���Ă����X�J�C�Z���T�[2000PC������d�͂����Ȃ�
�~�̊��������ł��o�b�e���[�̎������ǂ��悤�Ɋ����܂��B
��
���q�l����NJP�ԓ��V�̎ʐ^�𑗂��Ē����܂����B
���h���ԓ��V�ł��B
 DOG NS-5000PK264A2NJP |
(2012,9/2)
��
NS-5000�p�V�^�n���h�{�b�N�X�Ƃ���Android���������Ă��܂��B
�V�^�n���h�{�b�N�X���J�����ł����AAndroid�X�}�[�g�t�H����^�u���b�g��NS-5000�̃n���h�{�b�N�X�Ƃ��ė��p�ł��Ȃ����������Ă��܂��B
�X�}�[�g�t�H��,�^�u���b�g�̉��i�������Ȃ��Ă��܂��B�V�i�͍����ł����A���X�ɏo�����V�^�̂��A�ŁA�l�����肪�������A
������̃X�}�[�g�t�H�����Õi�Ȃ�I�[�N�V�����łT�O�O�O�~�ȉ��ŊȒP�ɍw���ł��܂��B������@�ŏ\���Ȑ��\������܂��B
�^�u���b�g�����l�ł��B�Ⴆ�A����Pad�Ƃ�������ȃ^�u���b�g������܂����A�Q�C�R�N�O�܂ŏ��X���������i�ł����B
�Ƃ��낪�ŋ߂͗l�q������Ă��Ă��܂��B�V�i�łP�O�O�O�O�~�ȉ��̃^�u���b�g�́A���q�l�̃N�`�R�~���������A�\�����p�I�Ȑ��i�ɂȂ��Ă��܂��B
�X�}�[�g�t�H���A�^�u���b�g�ɂ́A�^�b�`�p�l���t���̃J���[�f�B�X�v���[���t���Ă��܂��B
��ȋ@�\�́A�ʐ^�A����AGPS�ABluetooth�AWiFi�A�^�b�`���́A�T�E���h�E�E�E�E�����ăC���^�[�l�b�g�ɐڑ��ł��܂��B
�����NS-5000�̃n���h�{�b�N�X�Ƃ��Ďg����Ί��p�ł���Ǝv���܂����B
�ڑ����@�́A�ȉ����������Ă��܂��B
�P�@Android��USB�P�[�u����NS-5000�Ɛڑ�����B
����͗L���ɂ��ڑ��ɂȂ�܂����Agoogle����e��A�v���P�[�V�����AAPI�����J����Ă��܂��̂ŁA�Z�p�I�ɂ͉����ł��܂��B
�L���͕s�ւȊ����ł����A�t�ɃP�[�u����Z�����A�Ⴆ�A�^�u���b�g��NS-5000�̖{�̂ɓ�������Ɩʔ�����������܂���B
�Q�@Android��WiFi�ɂ��NS-5000�Ɛڑ�����B
���̏ꍇ��NS-5000����WiFi�A�_�v�^�[���������K�v������܂����A�s�̕i�𗘗p����Z�p�I�ɉ����ł���Ǝv���܂��B
��̓I�ɂ�Andoroid�ƃ��[�^�����NS-5000�Ɛڑ����܂��B���[�^�͈�ʓI�ȕ���o�C�����[�^�A�f�U�����O�̂ł���X�}�[�g�t�H�������p�ł��܂��B
Andorid���ɐ�p�̃A�v�����쐬����K�v������܂��B
�R�@Android��WiFi�ɂ��NS-5000�i�E�F�u�E�T�[�o������j�Ɛڑ�����B
NS-5000���ɃE�F�u�E�T�[�o��������āAAndroid�̃u���E�U���瑀�삵�܂��B
���̏ꍇ��Android���ɃA�v���P�[�V���������K�v���Ȃ��u���E�U�����ő���ł��܂����ANS-5000�����S�������܂��B
�����[���V�X�e���ł����A�����̉ۑ�ɂ��܂��B
�S�@Android��Bluetooth�ɂ��NS-5000�Ɛڑ�����B
Bluetooth��Android�ȊO�ɑ�����PC�ɓ��ڂ���Ă��܂��B����������Android��PC�̗����Ɏg���܂��B
NS-5000����Bluetooth�A�_�v�^���������K�v������܂����A�s�̕i�𗘗p����Ώ��X�R�X�g��������܂����ȒP�ɂȂ�܂��B
�܂��Ǝ��ɃA�_�v�^���J�����邱�Ƃ��\�ł��B���̏ꍇ�͎s�̂�USB�@Bluetooth�@�h���O���i�P�O�O�O�~���炢�j�𗘗p���܂��B
Andorid���ɐ�p�̃A�v�����쐬����K�v������܂��B
��L�̂P�A�S���L�]�ƌ��Ă��܂��B
���ӌ��A����]������܂����牽�ł����\�ł��A���[�������肢���܂��B�Q�l�ɂȂ�܂��B
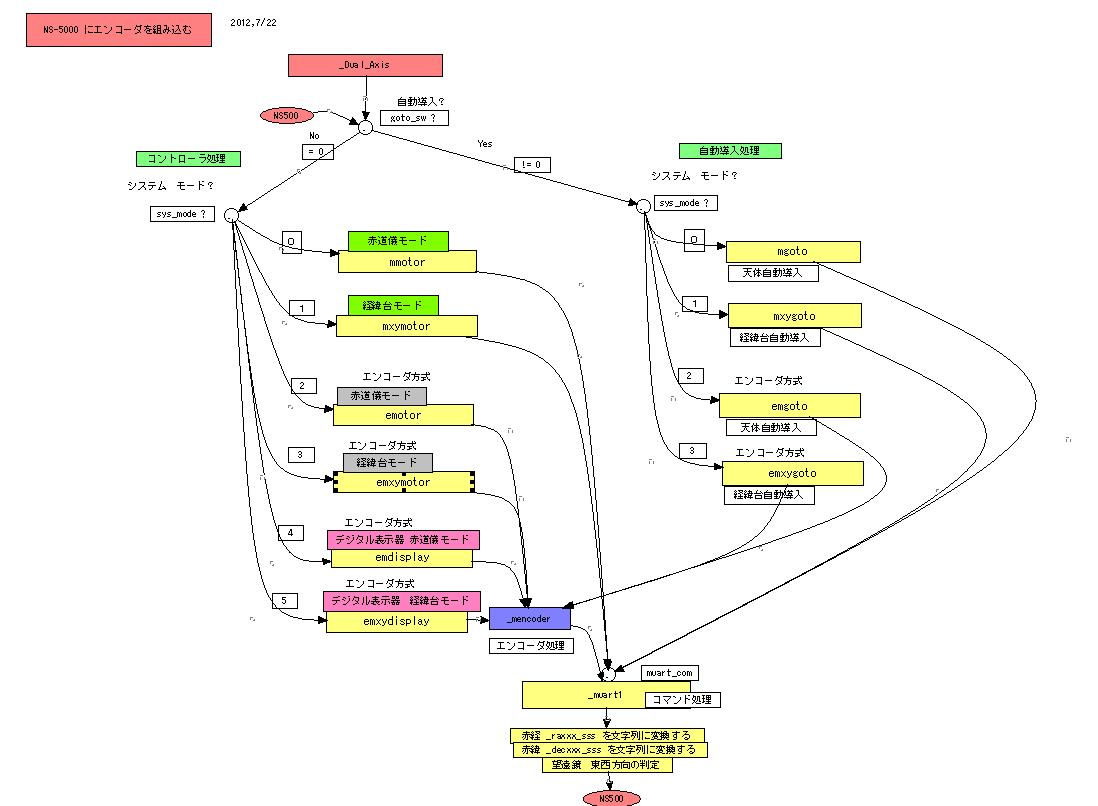
���G���R�[�_�ɑΉ�����NS-5000
Ver4.22���J�����ł��B
NS-5000�ɃG���R�[�_�@�\��������悤�ƁAVer4.22���v���O���~���O���Ă��܂����B
�Ƃ��ǂ����Ԃ����Ȃ����Ƃ�i�߂��̂ł����A���������I�����Ǝv���܂��B
�܂��G���R�[�_�̃e�X�g�����Ă��܂��A�ꕔ�֘A�R�}���h���m�F���Ă��܂��B
NS-5000
Ver4.22 �̃v���O�����T�C�Y��16.4K���[�h(49K�o�C�g)�ɂȂ�܂����B
���ꂩ��A�V�^�n���h�{�b�N�X�{NS-5000
(Ver4.21�܂őg�ݍ���ł���܂��j�́A32.6KW(97.8KB)�ł��B
Ver4.22�́A�G���R�[�_���g��Ȃ�����܂܂łƉ����ς��܂���B
�R�}���h�ŃG���R�[�_�����ɐ�ւ���ƁA��{�萔���G���R�[�_��{�萔�ɒu�������A�G���R�[�_�W�̋@�\�������ł��܂��B
Ver4.22�̃G���R�[�_�@�\�͉��}�̂Ƃ���ł��B
�V���ɁA�G���R�[�_�����̂S���[�h��lj����܂��B�������o�ܑ䃂�[�h�͍��̂Ƃ���o�ܑ�ǔ��͗\�肵�Ă��܂���̂ŁA�Q�l�@�\�ƍl���Ă��������B
���܂育���p����������@��͖����Ǝv���܂����A�f�W�^���\����͏����̐��i���ׂ̈ɂ����Ŏ������Ă������Ǝv���܂��B
���ꂩ��A�f�W�^���\����@�o�ܑ䃂�[�h�́A�v���O���~���O�̏����͂��Ă���܂����A���炭��ɂ��܂��B
�e���[�h�́A�R�}���h#:&XSYSx#
�Ő�ւ��邱�Ƃ��ł��܂��B
�G���R�[�_�p�̐ڑ��R�l�N�^�́ANS-5000�ɗ\���|�[�g���݂�܂���̂ŁA�I�[�g�K�C�h�[�q�𗘗p���邱�Ƃɂ��܂��B
���̈׃G���R�[�_�����ԓ��V���[�h�ł͊O���I�[�g�K�C�_�[�����p�ł��܂���B�������APC�ɂ��p�\�R���I�[�g�K�C�h�͑��v�ł��B
���̐���͏���CPU�{�[�h�̃o�[�W�����A�b�v������A�������邩������܂���B
|
|
(2012,8/19)
��
DOG
NS-5000SHOWA20E Ver4.21
���������܂����B
�挎�A���a�Q�OE�ԓ��V�p��NS-5000�̂��������Ă��܂������A�悤�₭�������܂����B
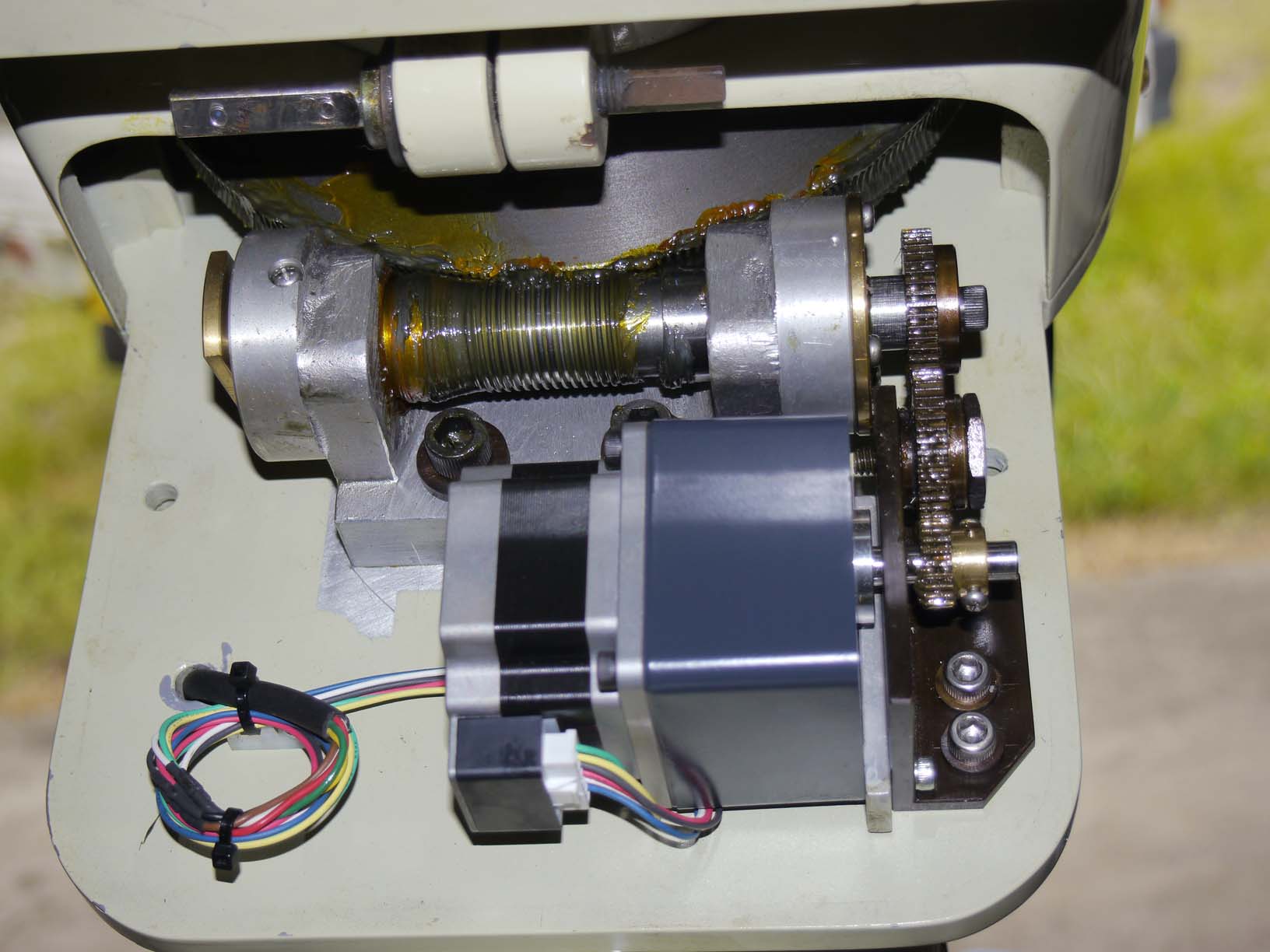
�ŏ��́A���[�^��PK243A1���j�|�[�������ŁA���[�^�M�����͐ԓ��V���̃R�l�N�^�ɏo�Ă���Ǝv���Ă��܂������A
���ׂ��Ƃ���A�o�C�|�[�������ŁA�ԓ��V�{�̂ɐ�p�̃��[�^�h���C�u�����������A�h���C�u�M�����R�l�N�^�ɏo�Ă��܂����B
����͗\�z�Ƃ͑啪����āA�����ȒP�ɂ͂����Ȃ��Ǝv���܂����B
|
|
|
|
NS-5000�̓��j�|�[��������p�ŁA�o�C�|�[�������̃��[�^���쓮�ł��܂���B
�����Œ��ڋ쓮�͂�����߂āA20E�̏������[�^�h���C�u�Ɠ������@�ŁA���[�^�h���C�u�����R���g���[���o���Ȃ������ׂ܂����B
�K���A���[�^�h���C�u��̓d�C�I�C���^�[�t�F�[�X�A������@�ɂ��ďڂ������ׂ邱�Ƃ��ł��܂����B
PK243A1�o�C�|�[���A�}�C�N���X�e�b�v�쓮�A�Q�p���X�����ŃR���g���[�����Ă��܂����B
NS-5000���́A���[�^�h���C�u��̎d�l�ɍ��킹�āA�Q�p���X�����ɉ������A�ڑ��P�[�u����E20�ԓ��V�ɂ��̂܂܍������ނ��Ƃ��ł���悤�ɂ��܂����B
���������āADOG
NS-5000SHOWA20E �́A���aE20�p�������[�^�h���C�u�ƌ݊���������܂��B
NS-5000SHOWA20E
�������p���������ꍇ�́A�������[�^�h���C�u�̑���ɁA�ڑ��P�[�u�����������ނ�����OK�ł��B
�܂�A20E�ԓ��V�̓��[�^�����A�����ȂǕK�v�Ȃ��A���̂܂܂ł����p���������܂��B
�d���́A�������[�^�h���C�u�Ɠ��l�ɁA�ԓ��V���狟������܂��BDOG���̏���d���͔��ɏ��Ȃ��A��50mA�ł��B
�d���X�C�b�`�́A�������[�^�h���C�u�Ɠ��l�ɁA�t���܂���ł����B�i���̕������S���Ǝv���܂����j
�ō����x�̃e�X�g�͂��Ă��܂��A�R�T�O�{���ʼn��K�ɃR���g���[���A�����������ł��܂����B
�ߓ��A
DOG
NS-5000SHOWA20E Ver4.21�@�i�����܂��B
|
|
(2012,8/16)
��DOG
NS-5000
Ver4.21���J�����܂����B���������@�\�����ǂ����d�v�ȃo�[�W�����A�b�v�ł��B
2008�N��NS-5000���J��������������ANS-5000�͎��������I�����ɃI�[�o��������\��������܂����B
���̃I�[�o�����͓������x�̒ቺ�������N�����܂��̂ŁA�����������@�ɂ��Č������܂����B
����@�͂������l�����܂����A�ȒP�Ńv���O���~���O���e�Ղȕ��@�Ƃ��āA
�ʏ�̎����������������Ă���A�����ɃI�[�o�������ړI�ɂ�������������lj����܂����B
�I�[�o������̂��߂̎��������́A��Ɛ��m�Ȏ��������𗼗����邽�߂ɁA
�X�s�[�h�͔�r�I�x���i�X�s�[�h�ԍ��P�U�ԁj�A�����p���X�͍ŏ��ōs���܂����B
���̃o�[�W�����A�b�v�ɂ��A�����p���X�̉e�����邱�ƂȂ��A�I�[�o�������������āA�ǍD�ȓ������x�������܂����B
���q�l�̃e�X�g�ł�±�R’�̐��x���o�Ă��܂��B
����̃o�[�W�����A�b�v�ŁADOG��±�P�T”�͈̔͂ɓ������Ă���͂��ł����A���ۂ͂��̂悤�ɂȂ�܂���B
����͑傫�������āA�\�t�g�E�G�A�덷�ƃn�[�h�E�G�A�덷�Ɍ���������Ǝv���܂��B
��ł���ɂ��ĐG�ꂽ���Ǝv���܂��B
�o�[�W�����A�b�v�́ADOG
NS-5000/501
�̑S�@��ŗL���ł��B
����]�̂��q�l�́A�{�̂𑗂��Ă��������A�o�[�W�����A�b�v���ς܂��ĕԑ������Ă��������܂��B
���q�l�T�|�[�g�Ƃ��Ė����ł����Ȃ��܂����A�����͒������ł��肢���܂��B
Ver4.21�̓������x�ɂ��ă��[�����܂����B�~�J�Q�Q�U�O�pNS-5000MIKAGE260�̂��q�l�ł��B
�ƂĂ�����₷���A�܂��q�ϓI�ȃf�[�^���܂����B(2012,7/7)���������������B
(2012,7/22)
�o�[�W�����A�b�v���肪�Ƃ��������܂��A�Z�b�e�B���O���I����Đ���Ԃ�
�҂��Ă���̂ł����[���܂ł͐���Ă���̂ɈÂ��Ȃ�ɏ]���܂���X��
�����Ă��܂��A���n�̉Ă͂��̃p�^�[���������@���ۂɐ����g���������m�F��
���Ԃ������邩���m��܂���B
�������}�\�t�g��ł͖��Ȃ��Ǝv���郌�x���Œ�~���邱�Ƃ͊m�F�o���܂���
�̂ŁA��������������̐��Ō��Ă݂����Ǝv���܂��B
�����܂ŗ���Ɛ��x�̑唼�͋@�B���x����߂�̂�������܂��A������܂߂�
�m�F�������ƍl���Ă��܂��B
������ɂ��Ă�����Đ��������Ȃ����Ƃɂ͂ǂ����悤���Ȃ��̂Ő���Ԃ�҂��]��ł��܂��B
�Ƃ������ƂŁA���������̂��m�点�����ɂȂ�܂��B
(2012,7/26)
�����b�ɂȂ��Ă��܂��A�s����ȓV�C�̒���������Ԃ��������̂ŕs�m���Ȃ���
Ver4.21�̓���m�F�����Ă݂܂����A�T���v���������Ȃ��̂Ŏb��I�ȕƂȂ�܂��B
�I�[�o�[�����̏C������͊m���ɓ��삵�Ă��Ĉ�x��goto��±�R′�ȓ��ɓ����ł��܂���
�T���v�����͏��Ȃ��ł������̓_�͉�������Ă���Ǝv���܂��B
���̒��ŏ����Ȃ��Ƃł����C���t�������Ƃ������Ă݂܂��B
����Ɋւ��Ăł����A�P��ڂ̓�����I�����ďC������Ɉڂ鎞�̢�ԣ����������̂ł́H
�Ɗ����܂����i�����܂ł���ςł��j
���ɐ��x�Ɋւ��Ăł����A����̃��[���ɂ������܂������Ɏ��ƌ����̕��s�x�����������̂�
����͐T�d�ɒ������Ă���܂��i��������H�j
�O��܂ł̓Y��������̂͐Ԍo���ŐԈܑ��͂قƂ�ǂ���܂���ł����A�������goto����
���s���čŏI�I�ɒ�~�����ʒu�ł̘b�ł��A�Ԍo���̃Y���͕��s�x�������Ǝv���܂��B
�Ƃ��낪����͐Ԍo���͂������ǂ������Ă���̂ɐԈܑ��̃Y�����傫���Ȃ����悤�ȋC�����܂��A
�Ƃ����Ă��Q′���x�̏����Ȓl�ł����E�E�E�A�O��܂ŗǂ������Ă����̂ŋt�ɋC�ɂȂ��Ă��܂��܂����B
�C���ʂ����̕����Ȃ��悤�ȋC�����܂��B
�����ݒ肵�ĕʂ̐��Ɉړ�������A������ē��������ۂ��Ԉܕ����ɃY�����������܂��A
�O��܂ł͍ē�������ƃY�����F���ł��Ȃ��ʍ����Ă��܂����B
�Ɏ��̍Ċm�F��������]�T���Ȃ������̂Ō������ʂ̂Ƃ���ɂ��邩������܂����̂���Ⴂ
�����邩������܂���A�����܂ł��]�T���Ȃ����ł̊m�F��Ƃł̋C���t�����_�ł��B
���ɂ�����Ƌ^��Ɏv�������Ƃ�����̂Ŏ��₢�����܂��B
NS-5000�͂ǂꂭ�炢�̐��x�ɓ������瓮����~����̂ł��傤���H���_��i�v���O�����j��L�̂悤��
�Y���͍l������͈͓��ł��傤���H
�u����́A�܂����ʂɍ��������������s�������I�����܂����A
�����ɁA�X�s�[�h�ԍ��P�U�̑��x�i�����p���X���͍ŏ��j�ŃI�[�o���������덷����������܂��B�v
�i�����p���X���͍ŏ��j�Ƃ͂ǂ��������Ƃł��傤���H�@�����p���X���̐ݒ�Ɋւ�炸�u�O�v�ł͂Ȃ��̂ł����H
���͓V�C�ɂ����܂����Y�����q�ϓI�ɂ킩��悤�ɉ摜�Ŏc�������Ǝv���Ă��܂��A�ēx�����Ă��������܂��B
��L�́u�ԁv�ɂ��Ăł����A�ʏ�̎�����������I�[�o�������ւ���A���ԓI�ȊԂ̂��Ƃł��B����͊m���ȓ�����������邽�߁A
�O�ׂ̈ɑ傫�߂́u�ԁv����ꂽ���̂ŁA���̌���ǂ��܂����B����͓������x�ɊW���܂���B
DOG�́A�ڕW�V�̂�±�P�T”�͈̔͂ɐڋ߂�����A�������������Ɣ��f���A�����I�����܂��B
(2012,7/29)
�����b�ɂȂ��Ă��܂��B
���������̉摜�𑗂�܂��A�摜�͏オ�k�łP�O′×�P�O′�Ƀg���~���O���Ă��܂��B
�ŏ��i253�j�̂ւт�����α������ɐݒ肵�Ď����������J��Ԃ��Ă��܂��B
259→260�@�Ɓ@263→264�ւ̈ړ��͎q�ߐ��z���ł��A���ׂĖ��Ȃ����x���œ�������Ă���Ǝv���܂��B
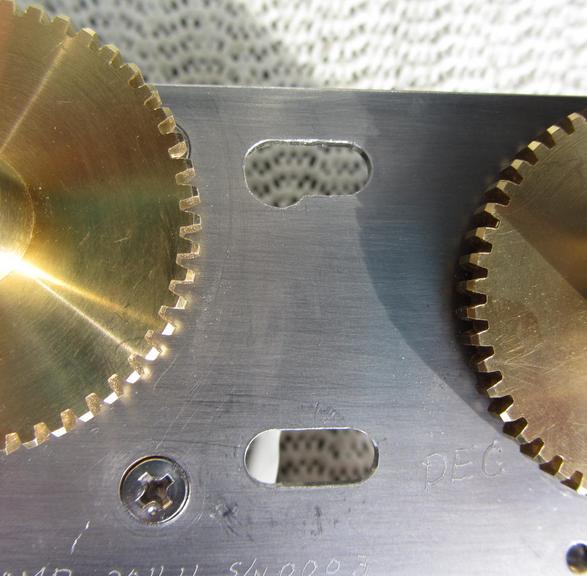
�O�[���̐Ԉܑ��̃Y���̓M�A�̊��݂��킹�������̋@�B���x�̖�肪�傫����������܂���
����ł́@�͂�����Ƃ͌����܂����̐ԓ��V�ŗL�̕Ȃ�������܂���B
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2012,8/13)
�����ǔ����x�A���z�ǔ����x�̐ݒ���@�ׂ܂����B
NS-5000�̓X�s�[�h�e�[�u���T�Ԃ̓��e���C�����邱�ƂŁA���ǔ��A���z�ǔ����x�������ł��܂��B
�v�Z���@�A�ݒ���@�i�R�}���h�j���ڂ��܂��̂ŁA�Q�l�ɂ��Ă��������B
���������@�����x�̌v�Z�A�ݒ���@�@��������
���ǔ����x�͍P���ǔ����x��96.35%
�Q�l
�u���ό������x
=
���ϑ��z��/(28.5306/29.5306)
=
89428.3274799689�b
�@*28.5306:�n�\��]���i�����n���̎����1������Ԃɒn�\���ǂꂾ����邩�j�@29.5306:1��]���v
�����@NJP�ԓ��V
PK264A2_SG7.2
��{�萔�@�Ԍo�@11059200
0x00A8C000�@16�i
�����x�@=
11059200 / 89428 = 123.665 [pps]
�X�s�[�h�f�[�^
=
2000000 / 123.665 = 16172 = 3F2C
16�i�@�@�X�s�[�h�e�[�u���p�@��{�N���b�N���@2MHz�̏ꍇ
#:&RA05=3F2C#
<--�R�}���h
�v�Z���ʂ��m�F���Ă݂�ƁA
���ۂ̌����x�́A
2000000/16172=123.670
pps�@�i�����Y���Ă��܂��j �X�s�[�h�e�[�u���p�@��{�N���b�N���@2MHz�̏ꍇ
���Ȃ�܂��B
NJP�̍P�������x�́A128.353pps�@�����猎���x�̊����́A
[123.670/128.353]*100=96.35
%
���������āA
#:&RA05=3F2C#
<--�R�}���h�@�͌��ǔ��ɗL�����Ǝv����܂��B
����GPD�ԓ��V
��{�萔�@�Ԍo�@1658880�@0x195000�@16�i
�����x�@=
1658880 / 89428 = 18.549 [pps]
�X�s�[�h�f�[�^
=
250000 / 18.549 = 13477 = 34A5
16�i �X�s�[�h�e�[�u���p�@��{�N���b�N���@250KHz�̏ꍇ
#:&RA05=34A5#
<--�R�}���h
�������A�g���N�X�ԓ��V
��{�萔�@�Ԍo�@3840000�@0x003A9800�@16�i
�����x�@=
3840000 / 89428 = 42.939 [pps]
�X�s�[�h�f�[�^
=
250000 / 42.939 = 5822 =16BE 16�i
�X�s�[�h�e�[�u���p�@��{�N���b�N���@250KHz�̏ꍇ
#:&RA05=16BE#
�X�s�[�h�f�[�^
=
2000000 / 42.939 = 46577 =B5F1 16�i
�X�s�[�h�e�[�u���p�@��{�N���b�N���@2MHz�̏ꍇ
#:&RA05=B5F1#
�����R�}���h�̑����
��
#:&RA05=3F2C#
#:=NEW#
���������@���z�ǔ����x�̐ݒ���@�@��������
���ύP������86164.091�b�i23����56��4.091�b�j
���ϑ��z��86,400�b
����NJP�ԓ��V
PK264A2_SG7.2
��{�萔�@�Ԍo�@11059200
0x00A8C000�@16�i
���z���x�@=
11059200 / 86400 = 128 [pps]
�X�s�[�h�f�[�^
=
2000000 / 128 = 15625 = 3D09 16�i
#:&RA05=3D09#
<--�R�}���h
����GPD�ԓ��V
��{�萔�@�Ԍo�@1658880�@0x195000�@16�i
���z���x�@=
1658880 / 86400 = 19.2 [pps]
�X�s�[�h�f�[�^
=
250000 / 19.2 = 13020.83 = 32DC 16�i
#:&RA05=32DC#
<--�R�}���h
�������A�g���N�X�ԓ��V
��{�萔�@�Ԍo�@3840000�@0x003A9800�@16�i
���z���x�@=
3840000 / 86400 = 44.444 [pps]
�X�s�[�h�f�[�^
=
250000 / 44.444 = 5625.05 =15F9 16�i
#:&RA05=15F9#
��
�P���R�[�X�J�C����NS���C�����܂����B
�߂��炵�����˗��ł����A�X�J�C����NS�̏C�������������܂����B
�Ǐ�́A�d���̋t�ڑ��ɂ�胂�[�^�������Ȃ��Ȃ����Ƃ������̂ł����B
���ׂ��Ƃ���A�{�̂̃��[�^�A�M�A�Ȃǂɖ��͂Ȃ��A�R���g���[������IC�����Ă��܂����B
������IC�̓�����T�����Ƃ���A���ɏd�v��IC���p�~�i�ɂȂ��Ă���A����悪�݂���Ȃ������̂ł����A
�K���݊��i�����ďC�����ł��܂����B�������Ȃ���Ζ��ȍ�ƂɂȂ�Ƃ���ł����B
���Ȃ݂ɁADOG
NS-5000�ŃX�J�C����NS�������Ƃ��\�ł��B
|
|
|
|
(2012,7/7)
��DOG
NS-5000 Ver4.20��Windows7
64bit��
�ɑΉ�����̂��m�F���܂����B
Ver4.20�Ƀo�[�W�����A�b�v���ꂽ���q�l���烁�[�������������܂����B
���}�\�t�g��
�X�e���i�r�Q�[�^Ver9
�ł��B
(2012,7/5)
�{���m�r�T�O�O�O�@���v�h�m�@�V�@�U�S�������̐ڑ��e�X�g���������܂����B
�~�J�Q�R�P�O�̓e�X�g�ł����ԂɂȂ��̂ŁA��قǃe�X�g���܂��������Ǝv���܂��B
�f�o�c�@�m�r�T�O�O�O�͂܂��Ɋ������܂����B
�ȑO�̂m�r�T�O�O�O�ł�
”�]�����}�[�N���W�����v����”
”��~�R�}���h���o�b��ŏo���Ȃ�”
”�]�����R���g���[���p�b�h���g���Ȃ�”
�Ȃǂ̏Ǐ���܂������A�����͂��ׂĂȂ��Ȃ�܂����B
�]�����p�b�h���g����̂�����肤�ꂵ���ł��B
�R���g���[���{�b�N�X���K�C�h�X�s�[�h�ݒ�̂܂܁A����������ւ��Ȃ��Ă������̂ŕ֗��ł��B
�ڑ��̓r�N�Z���r�r�Q�O�O�O�A�~�[�h�k�w�Q�O�O�ł̒��ڐڑ��ŁA�A�X�R����ł͂Ȃ���܂���B
�ނ��낱�̕��������Ǝv���܂��B
�o�b�Ƃ̐ڑ��́A�ڑ�������������A�ؒf���A�Đڑ���������ƈ��ڂŐڑ��ł����A�Q��ڂŐڑ��o���܂��B
����͉��x�e�X�g���Ă������ł����B�����͂킩��܂���B�R�Q�������@�w�o�@�U�S�������@�V�@�ǂ���ł���������ł��B
Ver4.18�܂����������͐�������̂ł����A�����������X�]�����}�[�N���W�����v�����ǏłĂ��܂����BVer4.20�ɂȂ���P���������m��܂���B
Ver4.20�́ALX200�@:Q#�R�}���h�Ŏ����������L�����Z���ł���悤�ɂ��܂����B
������������STOP�����~�{�^�����g���܂��B�]�����R���g���[���Ɍ��ʂ�����ł��傤�B
���݂̂Ƃ���ASCOM��Windows7
64bit�łɑΉ�����̂��ǂ�������܂���B
���ꂩ���ڑ�������������A�ؒf���A�Đڑ���������ƈ��ڂŐڑ��ł����A�Q��ڂŐڑ��o���܂��A�͉��̂��̂悤�ɂȂ邩�s�v�c�ł��B
����̃o�[�W�����A�b�v�ł͐Ԉ܃A���T�̃t�H�[�}�b�g���I�ɏC�����������ł�����A�ڑ��̐��ۂɊW���Ȃ��悤�Ɏv���܂����A�����ꗝ�R�������邾�낤�Ǝv���܂��B
��
�~�J�Q�Q�U�O�pNS-5000MIKAGE260�̎����������悪�͂��܂����B
���q�l���犮�������~�J�Q�Q�U�O�ԓ��V�̓���𑗂��Ă��������܂����B
�f���炵���ł��B�唗�͂ł��B
http://youtu.be/HOgoA8fT9ng
 DOG NS-5000MIKAGE260 (2012,6/25)���������������B |
(2012,7/6)
�~�J�Q�Q�U�O�͊ϑ����ւ̐ݒu�E�Ɏ��������������ē���m�F���قڊ������܂����B
���̗l�q�Ɠ��쒆�̓���𑗂�܂��A����̂ق��͎���������
���ƍ�
�x�K→���������� �A���N�g�D�[���X→������
�f�l�u
�Ɠ������Ă��܂��A�ǂ�����q�ߐ��z���̓���ł��B
�i����̓T�[�o�[�e�ʂ̊W�ŃT�C�Y�����������܂����j
�P�����쓮�̓��쉹�͑�ϐÂ��ŐU���������܂���B
�ō����m�F�ł�
RA��×485
DEC��×590�܂œ���OK�ł����i�C���Q�Q���j
���炵�����\�ł��A���S�����ĂƂ肠����
RA��×400
DEC��×500
�ɐݒ肵�܂���
����͂��̑��x�œ����Ă��܂��B
�������x�͓V�C�������A���m�ȂƂ���͂킩��܂������s�����c�肻���ł��B
�ō����������̂ƌ����p���X���ݒ�̂������Ǝv���܂����A�ڕW�������ʂ�߂��Ē�~���܂��A
���}�\�t�g�iCartes
du
Ciel�j�͂��̏�F�����Ă��܂��ANS-5000�̕��ł͔F�����Ă���̂ł��傤���H
���ۂɒʂ�߂���ʂ͂܂��m�F���Ă��܂���NJP�̂Ƃ����͖��炩�ɑ傫�ȃY���ƂȂ��Ă��܂��B
���}�\�t�g���ł̓Y����F�����Ă���̂����牽�x��������goto���J��Ԃ��Ă����Ɨǂ���ł����E�E�E�B
���ێ蓮��goto���R�`�S��J��Ԃ��Ƃقڒ��S�ɓ����ł��܂��B
DOG���ł��ڕW�ɗL����x�߂Â����猸�����Ē�~���铙�̐��䂪�ق����Ǝv���܂����B
���q�l�̃��[���ɑ��Ĉȉ��̂悤�ɕԐM���܂����B
>
�������x�͓V�C�������A���m�ȂƂ���͂킩��܂������s�����c�肻���ł��B
�ǂ����m���Ă��܂��B�K���������܂��̂ŏ��X���҂����������B
>
���}�\�t�g���ł̓Y����F�����Ă���̂����牽�x��������goto���J��Ԃ��Ă����Ɨǂ���ł����E�E�E�B
>
���ێ蓮��goto���R�`�S��J��Ԃ��Ƃقڒ��S�ɓ����ł��܂��B
�����ł��B����Q�C�R�������Ă��܂��B
>
DOG���ł��ڕW�ɗL����x�߂Â����猸�����Ē�~���铙�̐��䂪�ق����Ǝv���܂����B
�����ł��ˁB���ꂪ��r�I�ȒP�ȕ��@���Ǝv���܂��ˁB�������Ă��܂���B
���q�l�̂���]�ŁA�����NS5000�̃o�[�W�����A�b�v�̓G���R�[�_�W�̋@�\��\�肵�Ă��܂��B
���̎����A����ɉ����������Ȃ��Ǝv���Ă��܂��B
���ꂩ��G���R�[�_�ɕt���܂��ẮANS-5000�͕W�������A�V�^�n���h�{�b�N�X�ł̓I�v�V������\�肵�Ă��܂��B
�G���R�[�_�W�̋@�\�Ƃ��āA�G���R�[�_�����ɂ�鎩�������A�f�W�^���\�����\�肵�Ă��܂��B
���߂ɁA�������܂�����V�����o�[�W�����Ƃ��āA���ē����܂��B
��
�R���NS-5000���o�[�W�����A�b�v���܂����B
�A�X�g���V���b�v�`���@���}���l�i�D�y�s�j����̂��˗���NS-5000
Ver4.20�փo�[�W�����A�b�v�����Ă��������܂����B
�A�X�g���V���b�v�`���l�ɂ͑�ς����b�ɂȂ��Ă���܂��B�k�C���ŗL���ȓV���V���b�v�ł��B
|
|
(2012,6/25)
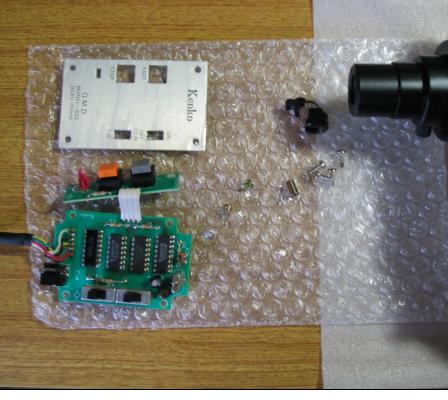
��
�~�J�Q�Q�U�O�p
NS-5000�̎ʐ^�𑗂��Ē����܂����B
�������������������~�J�Q�Q�U�O�p��DOG
NS-5000�i�b�o�t�{�[�h�j��[�i���āA�Ԃ��Ȃ����삳�ꂽ�p�l���A�ԓ��V�̎ʐ^�𑗂��Ē����܂����B(2012,6/16)
�p�l���͂����̂悤�ɑf���炵���o���h���ł��B
���[�^��PH266����A����]�ɂ��PKP264�V���[�Y�Ɍ�������Ă��܂��B
|
|
|
|
|
|
|
|
���o�[�W�����A�b�v�v���O���������J����\��ł������A�v���O�������삪�x��Ă��܂��B
�o�[�W�����A�b�v�v���O������TclPro�̃p�b�P�[�W�@�\�𗘗p���ĉ��x���g���Ă����o�[�W�����A�b�v�v���O�����A
����ɐV����NS-5000�̃V�X�e���t�@�C���A�����Tcl/Tk�̃C���^�[�v���^����̎��s�^�v���O�����Ƀp�b�N���č��܂��B
���̍�Ƃ͊ȒP�ɏI���̂ł����A����͎��s����ƕp�ɂɃG���[���������āA���݂̂Ƃ�������ł��Ă��܂���B
�Â��Ȃ���TclPro
1.4
��windows�ɏ\���ɑΉ��ł��Ȃ����Ƃ����������m��܂���B
���邢�́A�V�����o�b�́@Aspire
one WindowsXP Service
Pack 3 �AUSB
-
RS232C�ϊ��P�[�u�����W���Ă��邩���H
�����ɂ̓v���O���~���O�����ύX����ȂǁA���{�I�ȑ�łȂ��Ɠ���悤�Ɏv���܂��B
TclPro��RS232C���W���Ή��A�v���O���~���O���ȒP�A�Z�L�����e�B�\�Ƃ������ƂőI�т܂����B
�V�������ꂪ�K�v���Ǝv���ƋC���œ���܂��B
DOG
NS-5000
Ver4.20�͖w�ǂ̐��}�\�t�g�ɑΉ����邱�Ƃ��ł��܂��B
����]�̂��q�l�́A�{�̂𑗂��Ă��������A�o�[�W�����A�b�v���ς܂��ĕԑ������Ă��������܂��B
���q�l�T�|�[�g�Ƃ��Ė����ł����Ȃ��܂����A�����͒������ł��肢���܂��B
���ꂩ��Ver4.20��
TheSky
Ver6 �@Gemini
by Losmandy ���ڑ��ł��܂����B
(2012,6/17)
��
�X�e���i�r�Q�[�^Ver6
�@TheSky�@
Cartes
du
Ciel�Ńe�X�g���܂����B
�Ԉ��t�H�[�}�b�g��ύX����NS-5000�́A�ȉ������}�\�t�g�����Ȃ������ݒ�(�����j�A���������A���u����ł��܂����B
����ɂ��NS-5000�͂قƂ�ǂ̎�v�Ȑ��}�\�t�g�ɑΉ����āA���S���Ă����p����������悤�ɂȂ����Ǝv���܂��B
�����NS-5000
Ver4.20 �Ƃ��܂��B�ߓ��o�[�W�����A�b�v�v���O���������J���܂��B
Windows
XP Home Edition Service Pack 3�@�Ńe�X�g���܂����B
�P�@Cartes
du Ciel Ver2.76�@�@�n�j
�Q�@�X�e���i�r�Q�[�^Ver6
Ver6.1�@�@�n�j
�R�@�X�e���i�r�Q�[�^Ver9
9.0c�A�b�v�f�[�^�@�@�n�j
�S�@TheSky
Ver5 Ver5.00.011�@�@�n�j
�T�@TheSky
Ver6 �v���t�F�b�V���i����
Ver6.0.0.26�@�@�n�j
�@�@LX200
(non GPS)
�@�@pentax
�@�@showa
�@�@SkySensor
2000 by VIXEN
(2012,6/16)
��
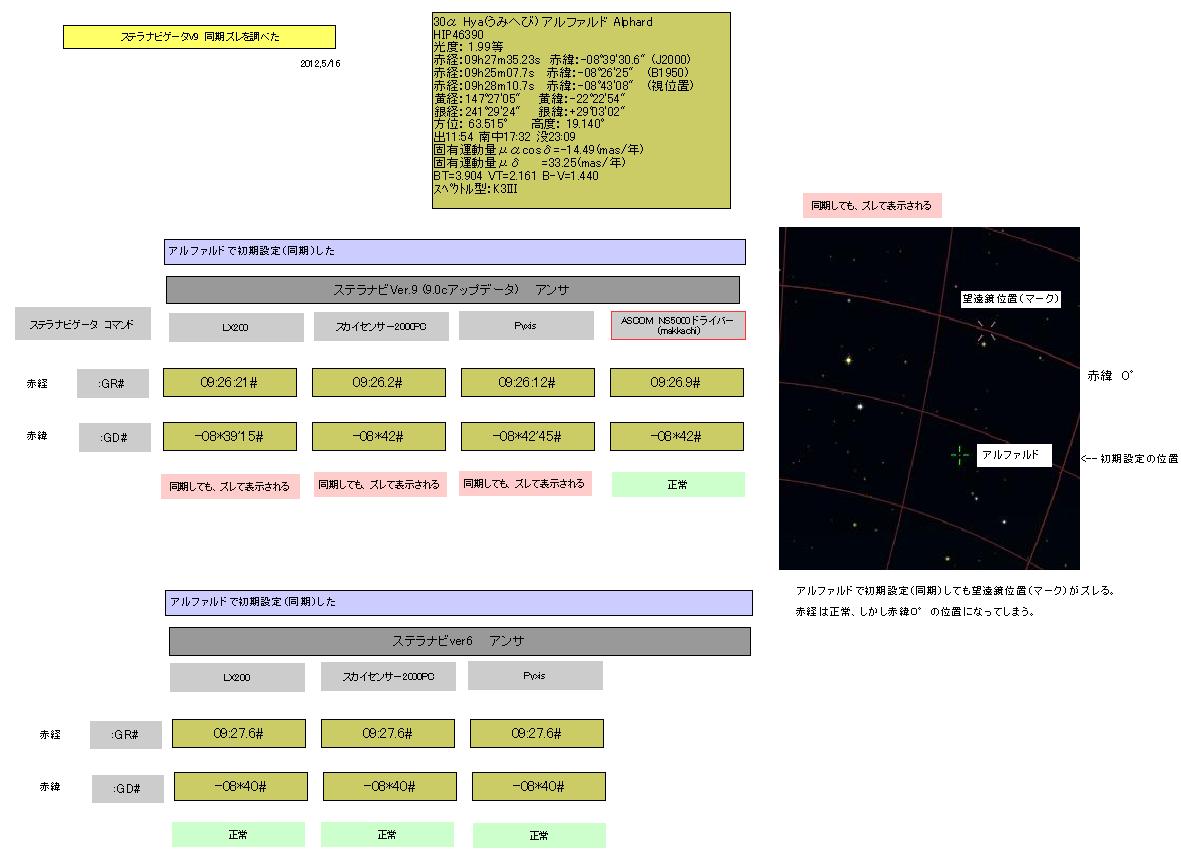
�X�e���i�r�Q�[�^Ver�X�@�̕s��̌������킩��܂����B
�X�e���i�rVer�X�ł́A�����ݒ�i�����j�A��������������ɓ��삵�܂���ł����B
�����ŁA���̗l�q�Ɠ���������Ƃ���
�A
�����ݒ�i�����j�͐������Ă���A�]�����ʒu�}�[�N�̓Y���ĕ\������Ă�����̂̎����������̂͐���ɍs���邱�Ƃ�������܂����B(2012,5/31)
�����́A�Ԉ܂̃A���T���X�e���i�r�Q�[�^Ver9�Ő������F������Ă��Ȃ����Ƃɂ���܂��B
�R�}���h�@�@�@�@�@�@�@�@�@�@�A���T�ANS-5000��PC�֕ԐM���܂��B
:GR#�@�@�@�@�@�@�@�@�@�@�@�@�Ԍo�@�@����
�FGD#�@�@�@�@�@�@�@�@�@�@�@�@�Ԉ܁@�@����ɔF������Ȃ�
�Ԉ܃A���T�̗�
-08*39'15#�@�@�@LX200�@�@�@�@�F������Ȃ�
-08*42#�@�@�@�@�@SS2000PC�@�@�F������Ȃ�
-08*42'45#�@�@�@Pyxis�@�@�@�@�F������Ȃ�
-08*42#�@�@�@�@�@ASCOM
NS-5000��p�h���C�o�[�@�@OK�@�@�i�悤��������Ȃ̐���ցj
�܂�ASCOM�ȊO�́A�X�e���i�rVer�X�ł͔F������܂���B
�������A�X�e���i�rVer�X����A�����ݒ�i�����j����ꍇ�A���̈ʒu
�̐Ԍo�A �Ԉ܂��R�}���h��NS-5000�ɑ��M����̂ł����A
��P�@�@:Sr
01:55.3#:Sd +20*52#�@�@�@�@�@Sd���Ԉ܂ł��B
��Q�@�@:Sr
01:55:19#:Sd +20*52:05#
�܂��AMeade
Telescope Serial Command Protocol�@�ł�
�@�FGD#�R�}���h�ɂ��Ĉȉ��̂悤�ɋL�q���Ă���܂��B
NS-5000�R�}���h�W�͂��̎�������ɂ��ĊJ�����܂����B
:GD#
Get Telescope Declination.
Returns: sDD*MM# or sDD*MM’SS#
�@�@Depending
upon the current precision setting for the telescope.
�ȏォ��Ԉ܃A���T���Ȃ��F������Ȃ��̂��H�ǂ�������܂���B���Ȃ��悤�Ɍ����܂��B
�������A�X�e���i�rVer6�ł͐���AVer9�͏�Q���������܂��B
���낢��Ǝ��s���낵���̂ł����A
�Ԉ܂�Ԍo�A���T�Ɠ����t�H�[�}�b�g�ɕύX������A����ɔF������܂����B
-08:39:15#�@�@�@LX200�@�@�@�@OK
-08:42#�@�@�@�@�@SS2000PC�@�@OK
-08:42:45#�@�@�@Pyxis�@�@�@�@OK
-08:42#�@�@�@
ASCOM
NS-5000��p�h���C�o�[�@�@OK�@�@�i�悤��������Ȃ̐���ցj
�܂��A���̏�Ԃňȉ��̐ԓ��V�Ƃ��݊��������萳��ɓ������Ƃ��m�F���܂����B
PENTAX
IC-55i
SHOWA
ATLAS/ATLASTAR
�悤�₭�������@�������܂����B
�t�H�[�}�b�g�̕ύX���A�����X�e���i�r�Q�[�^Ver6
�@TheSky�@
Cartes
du
Ciel�Ŗ�肪�N����Ȃ����e�X�g���Ă���A�o�[�W�����A�b�v�v���O���������J���܂��B
�������҂����������B
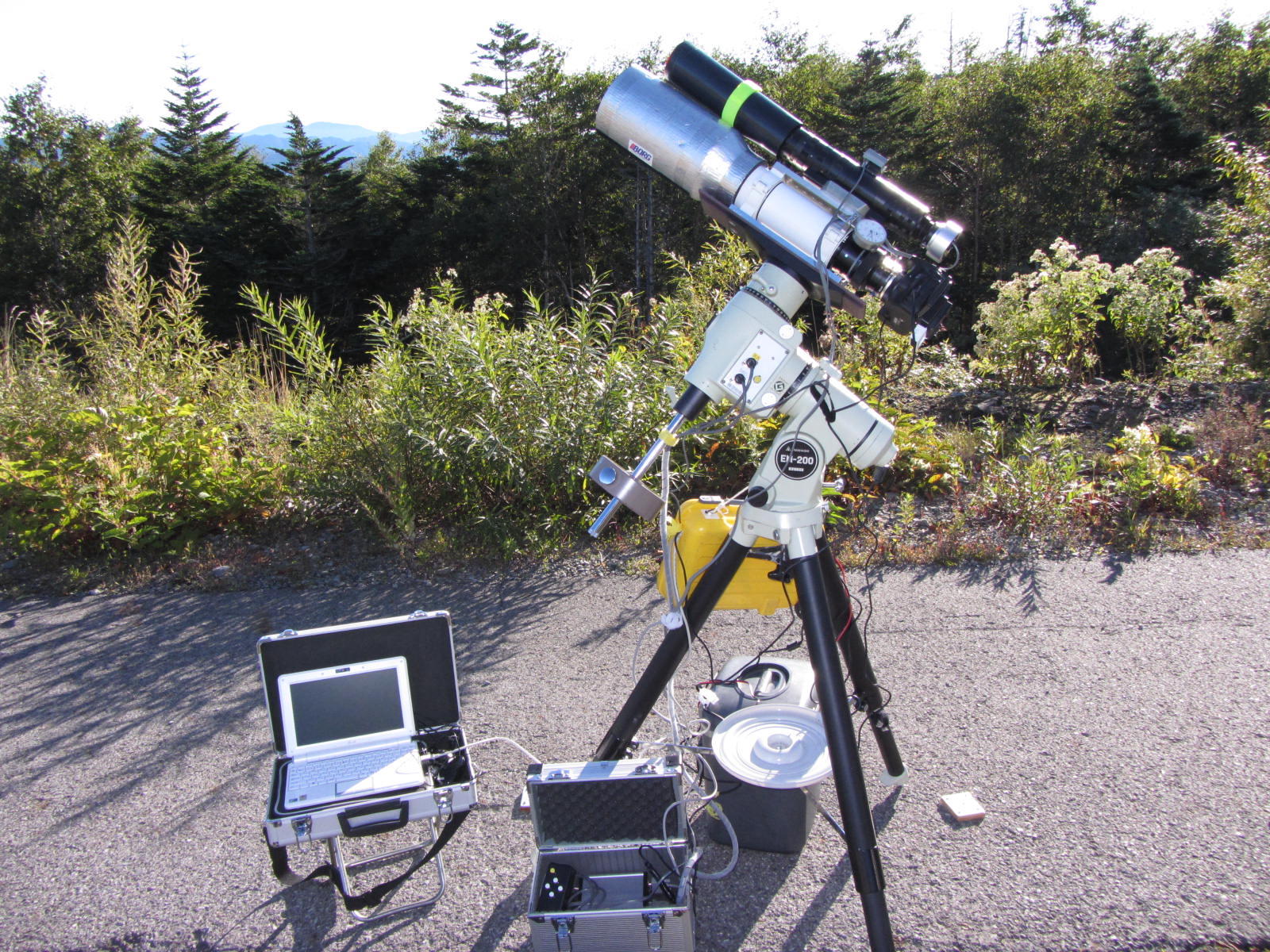
(2012,5/31)
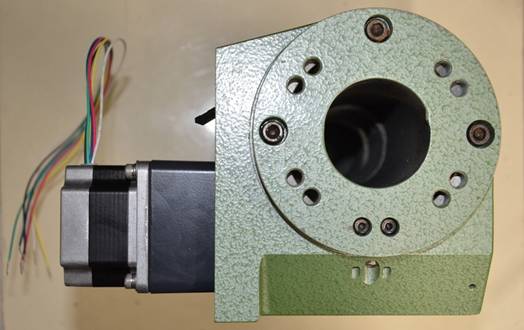
��EM200�ԓ��V��NS-5000EM200HB�ł��B
�[�i�O�Ɏ��������A�I�[�g�K�C�h�e�X�g���s���܂����B
|
|
|
��NS-5000EM200HB���[�^���j�b�g�A�p�l�������ǂ��܂����B
|
|
|
�p�l���ɃV���N������s���܂����B
���߂Ăɂ��Ă͂Ȃ��Ȃ��ǂ��o�����Ǝv���܂��B
�R�l�N�^�̓A���t�F�m�[���Q�T���ł��B���A�g���N�X�ƌ݊���������܂��B
DIN8p�R�l�N�^�Q�̃p�l�����p�ӂ��Ă��܂����A��͂��{�P�[�u���Őڑ�����̂��X�}�[�g�ł��B
|
|
���X�e���i�r�Q�[�^Ver�X�ł͐Ԉ܂ŏ����ݒ肪�o���Ȃ���Q���������Ă��܂������A���ׂ��Ƃ��돉���ݒ�i�����j���̂��̂́A����Ɏ��s����Ă��܂����B
�����͕ʂ̂Ƃ���ɂ���悤�ł��B
|
|
(2012,4/23)
��DOG
NS-5000�@3����������܂����B
������NS-5000EM200HB(�Q�n���O���s
�M�K�I�v�g�l
)�ANS-501GP(�H�t���X�^�[�x�[�X�l
)�ANS-5000GP(�O���[�h�A�b�v)�ł��B
EM200HB�ł́A�Ԉܑ̂̊ɂ݂�����܂����̂ŁA���S���l���č������쏊�ɏC�����˗����܂����B
�܂��A���q�l�̂���]���琯�}�\�t�g�AASCOM�W�̃C���X�g�[���A����Ƀp�\�R���V�X�e���̃C���X�g�[���A�X�V���s���Ă��܂��B
�܂��A����͏��߂ĂɂȂ�܂����A�V���N������������Ă��܂��B�悸EM200�p�l���̈�����ڕW�ł��B
|
|
���V�^�n���h�{�b�N�̑����ł��B
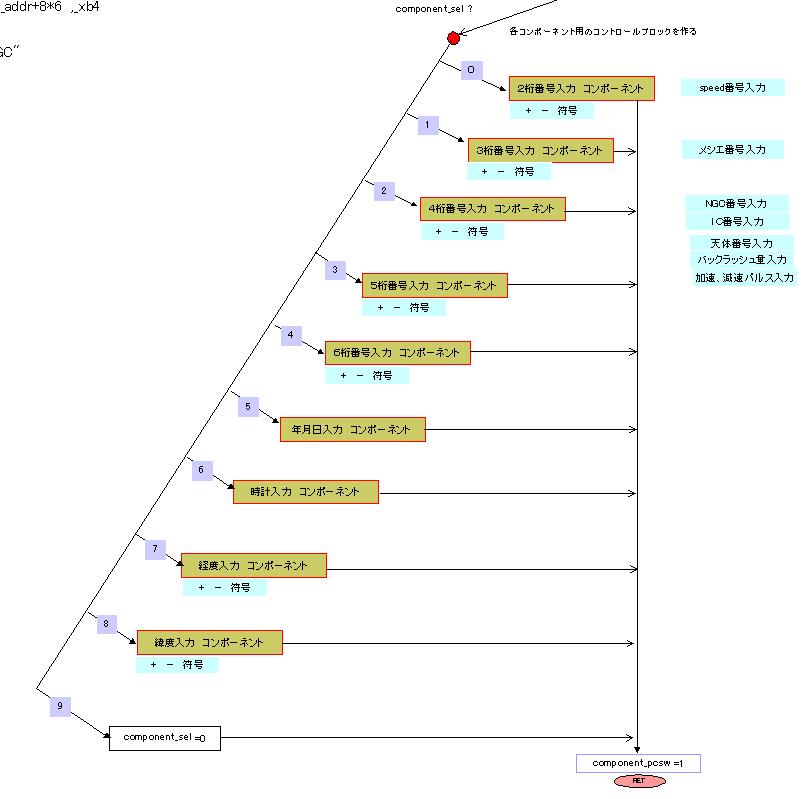
��ƂɎ��Ԃ��������Ă��܂��B���݂̖ڕW�͈ȉ��̋@�\�i�R���|�[�l���g�j���������邱�Ƃł��B
���ꂩ��A�X�e���i�r�Q�[�^Ver�X��ASCOM���琳��ɐڑ��ł��܂����A������g�킸�_�C���N�g�ɐڑ�����ꍇ�ɖ�肪����܂��B
�X�e��Ver6�͐���ł����A������Ver9�ɂȂ�Ԉ܂ŏ����ݒ肪�o���Ȃ���Q���������܂����B
�V�^�n���h�{�b�N�X�ł͂�����������Ă��������Ǝv���Ă��܂��B
�����������������Ă��܂��B���}�\�t�g��ASCOM�R�}���h�ׂ܂����B
PC����NS5000�֑����Ă���R�}���h���A�ڑ��A�����E�ꏊ�𑗐M�A�����ɕ����āA���̂܂܋L�^���܂����B
Ver�U�AVer�X�ɈႢ���Ȃ��悤�Ɍ����܂����A���ʂ́AVer6����AVer9�͏�Q���o�܂��B
|
|
(2012,3/19)
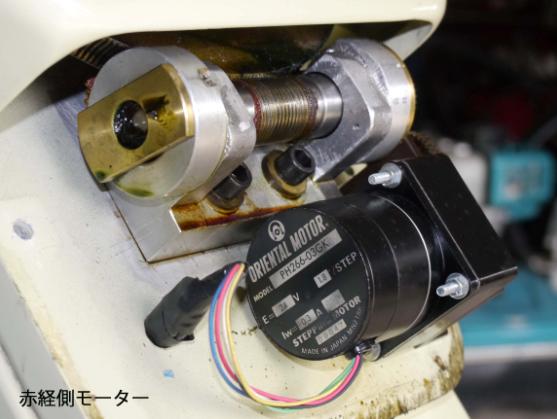
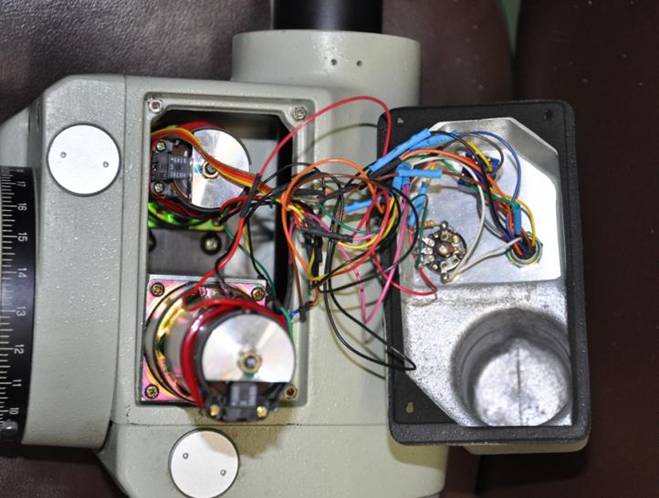
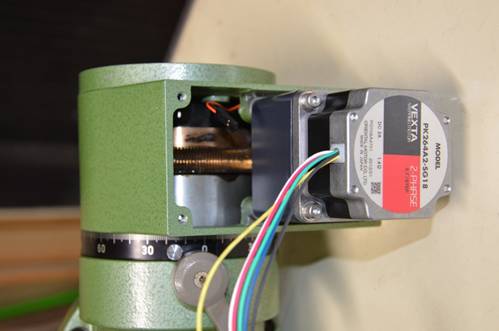
��DOG
NS-5000EM200HB�̂��������܂����B
�ԓ��V�ɂ̓r�N�Z���@�X�J�C�Z���T�[�Q�O�O�O
�p���[�^����t���Ă���܂����B
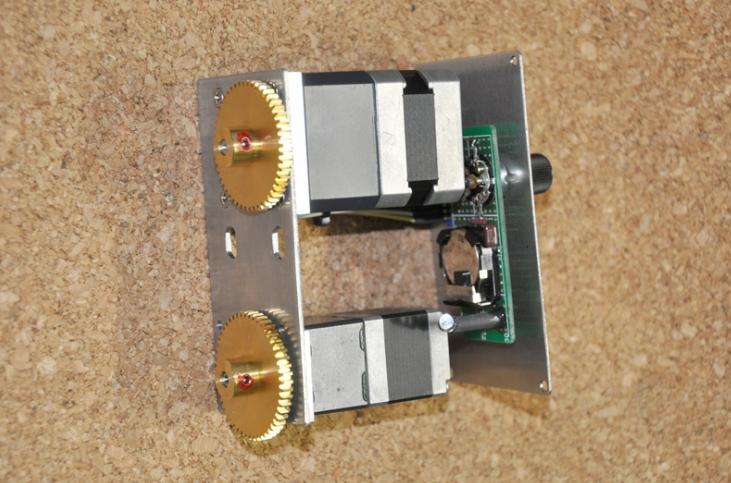
DC���[�^�̑����EM200HB�n�C�u���b�h�X�e�b�s���O���[�^����t��NS5000�Ɛڑ����܂��B
�ʐ^�̓��[�^�J�o�[���J�����Ƃ���ł��B
�c�b���[�^�̃G���R�[�_�X���b�g�~�i���w���j���ނ��o���ɂȂ��Ă��܂����B
�~�̓��[�^�̉�]���x�A�p�x�̌��o��ړI�Ɏ�t�����Ă��܂��B����͔��ɍ����ʼn�]���܂��̂ŁA�����A�y�ʂɍ���Ă��܂��B
���̂��߃��C���ȂǂɐڐG���邾���ŊȒP�ɕό`�A�j�����鋰�ꂪ����܂��B�������ĐS�z�ɂȂ�܂����B
2012,3/11
|
|
|
���r�N�Z��SXP�ԓ��V�ׂ܂����B
���q�l�̂��˗��ŁASTARBOOK
TEN + �r�w�o�ԓ��V��
NS5000��ASCOM�A���u����A���������������ł��Ȃ����������܂����B
�����̌��ʁA�ȉ��̕��@��STARBOOK
TEN��NS5000�̗����Ō��p�ł���悤�ɂȂ�Ǝv���܂��B
�ԓ��V�͉��H�͂��܂���̂Ō��̏�Ԃɖ߂����Ƃ��ł��܂��B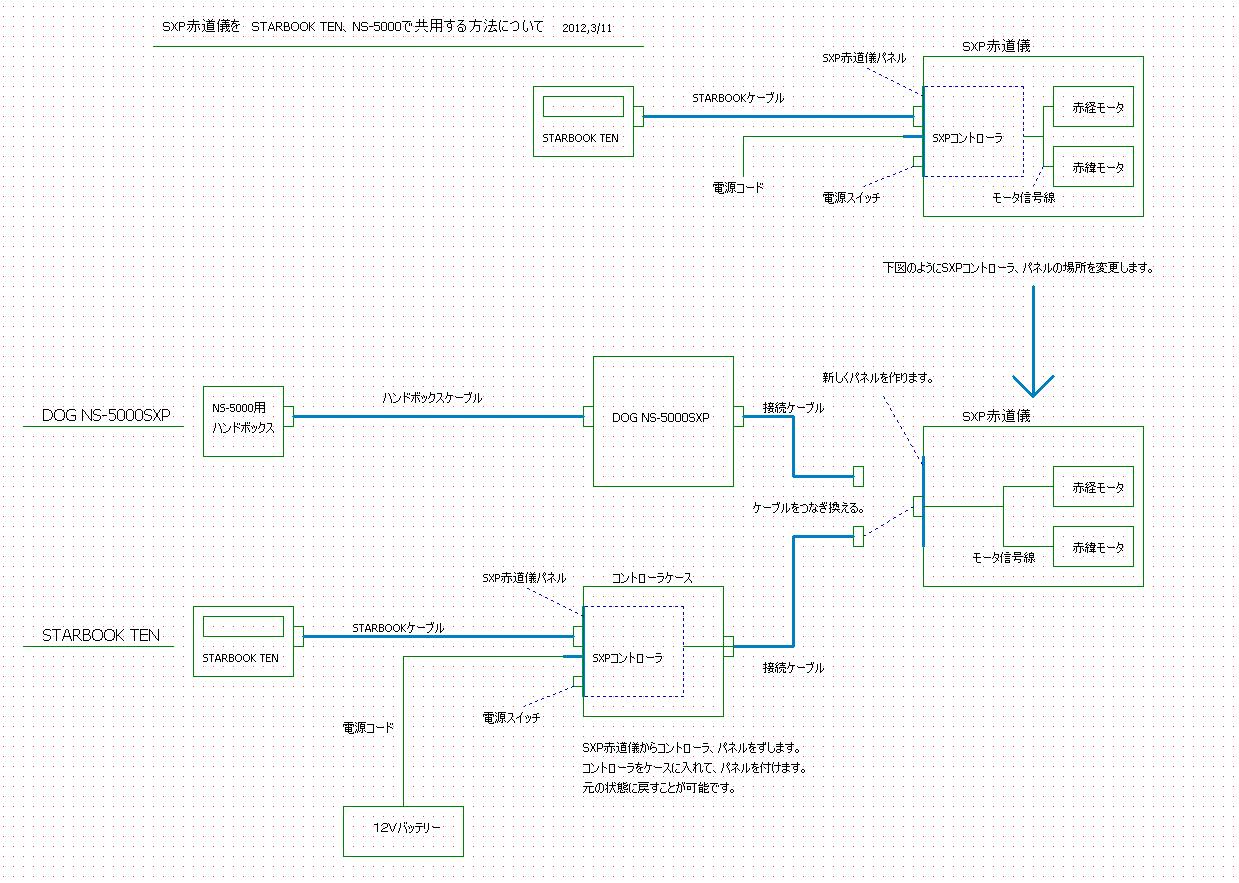
|
|
|
���y���^�b�N�XMS-4�ԓ��V�̍ō����x�ɂ���
�ԓ��V�͂��q�l�ɔ[�i�ς݂ł��B
NS-5000PK264NJP���g���čō����x�̃e�X�g�����Ă���܂��B2012,1/9
MS-4 PK264-SG18
**************
1/16�����@�P����
�Ԍo
160pps
�Ԉ�
120pps
**************
1/8�����@�P����
�Ԍo
80pps
�Ԉ�
60pps
�d���P�Q�u�@�o�b�e���[�i�厩�H�Ɛ�/�r�f�R�O�O�O�j
MS�|�S�ԓ��V�̗\�z�ō����x
�P�@�Ԍo�@1/16����
NO.50
80Kpps /160pps =�@��500�{��
�Q�@�Ԉ܁@1/8�����@NO.40
39Kpps /60pps =�@��650�{��
�Ԍo�@1/8�����@�@�@�@
39Kpps
/80pps =�@��480�{��
(����j
�ȏォ��400�{���ȏ�o��Ǝv���܂��B���i�͍T���߂ɂR�T�O�{���ŏo�ׂ��܂����B
�y���^�b�N�XMS-4�ԓ��V�p�@DOG
NS-5000MS4HB
(2012,2/16)
���V�^�n���h�{�b�N�̑����ł��B
�e�@�\�͋�̏�Ԃł����AMODE,
SEL���������悤�ɂȂ�܂����B
�p�\�R���Ɛڑ����邱�Ƃ��ł��܂����B
�J���p�b�o�t�{�[�h�ɂq�r�Q�R�Q�b�@�h�b�����t���ăp�\�R���ƒʐM���ł��܂����B
���[�e�B���e�B�\�t�g�̊m�F�ƁA�X�e���i�r�Q�[�^
V9�ɐڑ����Ď����������ł��܂����B
����̓I�v�V�����̂m�r�T�O�O�O�̕����������ɂȂ�܂��B
�J���pCPU�{�[�h�́A�V�^�n���h�{�b�N�X�p�Ƃ��č���Ă��܂����A�I�v�V�����Ƃ���NS5000������ł���悤�Ɍ������Ă��܂��B
NS5000�́A���^�̃n���h�{�b�N�X�ɂ��܂��̂ŁA�O�D�T�`�ȉ��̏��^�ԓ��V�p�Ɍ��邱�ƂɂȂ�܂��B
����́ACPU�{�[�h�̒��ŁA�V�^�n���h�{�b�N�X��NS5000�V�X�e�����A���݂ɂ܂������W���Ȃ���ԂŁA�����ɓ����Ă��܂��B�i�}���`�^�X�N�j
NS5000�͂��Ȃ��|����ȃV�X�e���ł����A�ʁX�ɓ����Ă���l�q�͕s�v�c�Ȋ��������܂��B
���́A�n���h�{�b�N�X������A�����i�I�v�V�����j�̂m�r�T�O�O�O�ƊO���ɐڑ�����m�r�T�O�O�O�ƒʐM�ł���悤�ɂ��܂��B
�n���h�{�b�N�X�̂Q�����[�^�h���C�u�@�\�͘g�g�݂����������o���オ���Ă��܂��B��肭�����m�r�T�O�O�O�̃R���g���[�����ł���悤�ɂȂ�܂��B
�ڑ����@�́A�����A�O���Ƃ��ɃV���A���i�q�r�Q�R�Q�b�j���o�R���čs���܂��B
�܂�A�����i�I�v�V�����j�̂m�r�T�O�O�O�̓n���h�{�b�N�X�Ɠ������Ă��܂��̂ŕϐ��A�T�u���[�`���Ȃǒ���NS5000�̃v���O�����������Ă��܂����A�O���Ɠ��l�ɃV���A���o�R�����ŃR���g���[�����܂��B
�ԍ����͕��@
���V�G�A�m�f�b�ԍ�����t�A���v�A�o�x�A�ܓx�A�X�s�[�h�ԍ��E�E�E�Ȃǂ̓��͕��@�����߂܂����B
�J�[�\�����ړ�������Ƃ��A�P�O�L�[��\�����đI������Ƃ��A�������������܂������A�������傭�����Ƃ��V���v���Ȃ����ɗ��������܂����B
���]���Ă��鐔���̕������A�Ԉ܁i�㉺�j�L�[�łO�`�X����͂��A�Ԍo�i���E�j�L�[�ʼn��Ɉړ������ĂS���̐�������͂��܂��B
�v���O�����͂��������Ŋ������܂��B
�����������^�̉t���p�l���Ƀo�b�N���C�g��_���܂����B
�����̂悤�Ɏ��Ɍ��₷���p�l���ł��B�����̑傫�����育��ŁA�p�l���̑傫���͌����NS5000�P�[�X�ɒ��x�����Ɗ����܂��B
�V�^�n���h�{�b�N�X�͐��i���܂Ŏ��Ԃ�������܂����ANS5000����������Ȃ��A�t���p�l����p�ӂ���Ύ��p���ł��܂��B
�ǂ�������ǂ����v�Ē��ł����A�O�����Ɍ������Ă��܂��B
���̏ꍇ��NS5000����O���[�h�A�b�v�őΉ������Ă��������܂��B�܂��A�V�K�ɂ��������������������A�O���[�h�A�b�v������������ɂȂ�悤�ɂ��܂��B
���ӌ��A����]�Ȃǂ���܂����烁�[�������肢���܂��B
|
|
|
�Y��ɕ\������܂������A�V�̊ϑ��ɂ͖��邷���ł��B �Â�����\��ł��B |
(2012,2/6)
���y���^�b�N�XMS-4�ԓ��V�Ƀ��[�^�J�o�[�����t���܂����B
���q�l�ɂ͑�ς��҂������Ă���܂��B�����܂ł��������ł��B
���[�^�J�o�[�͓����͐V�K�Ƀt���J�o�[�삷��\��ł��܂������A�����̂悤�ɃX�y�[�T�����ăI���W�i���J�o�[�������������̂ɕύX���܂����B
|
�@�A���~�u���b�N�@150Wx130Dx30t.JPG |
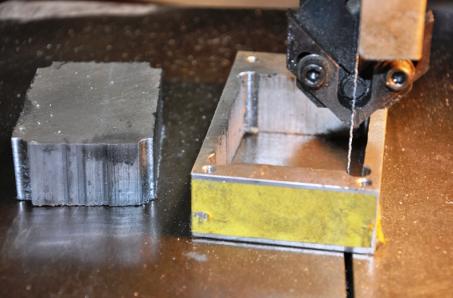
�A�A���~�u���b�N�ؒf.jpg |
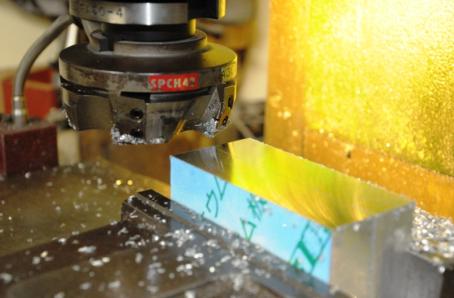
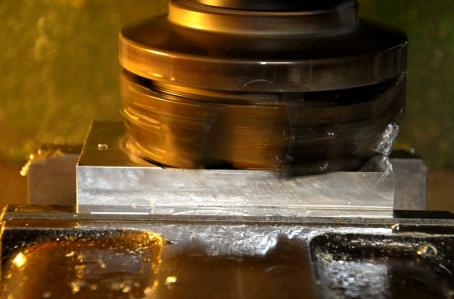
�B�A���~�u���b�N�c���t���C�X���H���@�o��.jpg |
�C�A���~�u���b�N���݃t���C�X���H���@�o��.jpg |
�D�A���~�u���b�N�O�����H��.jpg |
|
�E������.jpg |
�F�o���h�\�[���n�ʂ�.jpg |
�G������.jpg |
�H�t���C�X�d�グjpg.jpg |
�I�؍���H��.jpg |
|
�J�g�t���`�F�b�N.jpg |
�K�u���X�g����.JPG |
�L�h�������.jpg |

�M�J�o�[������g�t.jpg
���V�^�n���h�{�b�N�̑����ł��B
�b�o�t�{�[�h�ɃL�[�{�[�h��t���܂����B���̃n���h�{�b�N�X�ɁA�V�����l�n�c�d�A�r�d�s�L�[��lj������`�ɂȂ��Ă��܂��B
�C�x���g�R���g���[����������������ŁA�L�[����͉��K�A�v���O���~���O�̓V���v���ɂȂ�܂����B
�R���g���[�����[�h�������ԓ����悤�ɂȂ��Ă��܂����B
�e�L�[�̊�{�I�ȓ���
�l�n�c�d�L�[�@�@�S�̃��[�h��ؑւ��܂��B
�P�@�R���g���[�����[�h�@�@�@�@�@�Q�����[�^�h���C�u�ɑ������܂��B�ō����A�����A�ᑬ�A�K�C�h�X�s�[�h�@�̂S���ɐؑւ��邱�Ƃ��ł��܂��B
�Q�@�������[�h�@�@�@�@�@�@�@�@�@�V�̎����������s���܂��B
�R�@�����ݒ�i�����j���[�h�@�@�����ݒ肵�܂��B
�S�@�f�[�^���[�h�@�@�@�@�@�@�@�@���v�A�X�s�[�h�A�o�b�N���b�V���E�E�Ȃǂ�ݒ�A�������邱�Ƃ��ł��܂��B
�r�d�k�L�[�@���[�h���̊e�@�\��ؑւ��܂��B
�Ⴆ�A�i�b��j
�R���g���[�����[�h
�ō���à����à�ᑬà�K�C�h�@�\à�ō���à�E�E�E�E�ɐؑւ��܂��B
�������[�h
���V�G�V��à�m�f�b�V��à�h�b�V��à�E�E�E�E�ɐؑւ��܂��B
�r�d�s�L�[
����͗Ⴆ�K�C�h���J�n������A�����������X�^�[�g������A�@�\�ɂ���ē���������Ă��܂��B
�V�^�n���h�{�b�N�X�Ɏ��^����V�̃f�[�^���������Ă��܂��B
NS5000�{�́iROM�j�Ƀ��V�G�U�V�͓̂o�^�ς݂ł����A����ɏ����ݒ�p�Ƃ��āANS-4/12�̍�����g���Ă���R�V�̂�lj�����\��ł��B
����̓������J�[�h�ł͂Ȃ�ROM�ɓo�^���܂��B
���ꂩ�烁�����J�[�h�̕��ɂ�NGC,IC�V�̂�S������܂��B
�܂��A���q�l���쐬���ꂽ�f�[�^���o�^�ł���悤�ɂ������Ǝv���܂��B���[�U�[�V�́A�l�x�V�̂Ȃǂ�����Ε֗��ł��傤�B
�V�̃f�[�^�́A�P�V�̂P���R�[�h�Ƃ���A�f�[�^�A���s���܂߂ČŒ蒷�̃��R�[�h�ɂ��܂��B�Œ背�R�[�h�Ȃ獂���ŎQ�Ƃł���悤�ɂȂ�܂��B
�V�̐��̓������J�[�h�i�Q�`�S�f�a�j��\�肵�Ă��܂��̂łقږ������ł��B
�Ⴆ�ΓV�̐��P�Q���قǂ̃s�b�p���R�X���\������邱�Ƃ��ł��܂��B
���ӌ��A����]�Ȃǂ���܂����烁�[�������肢���܂��B
(2012,1/27)
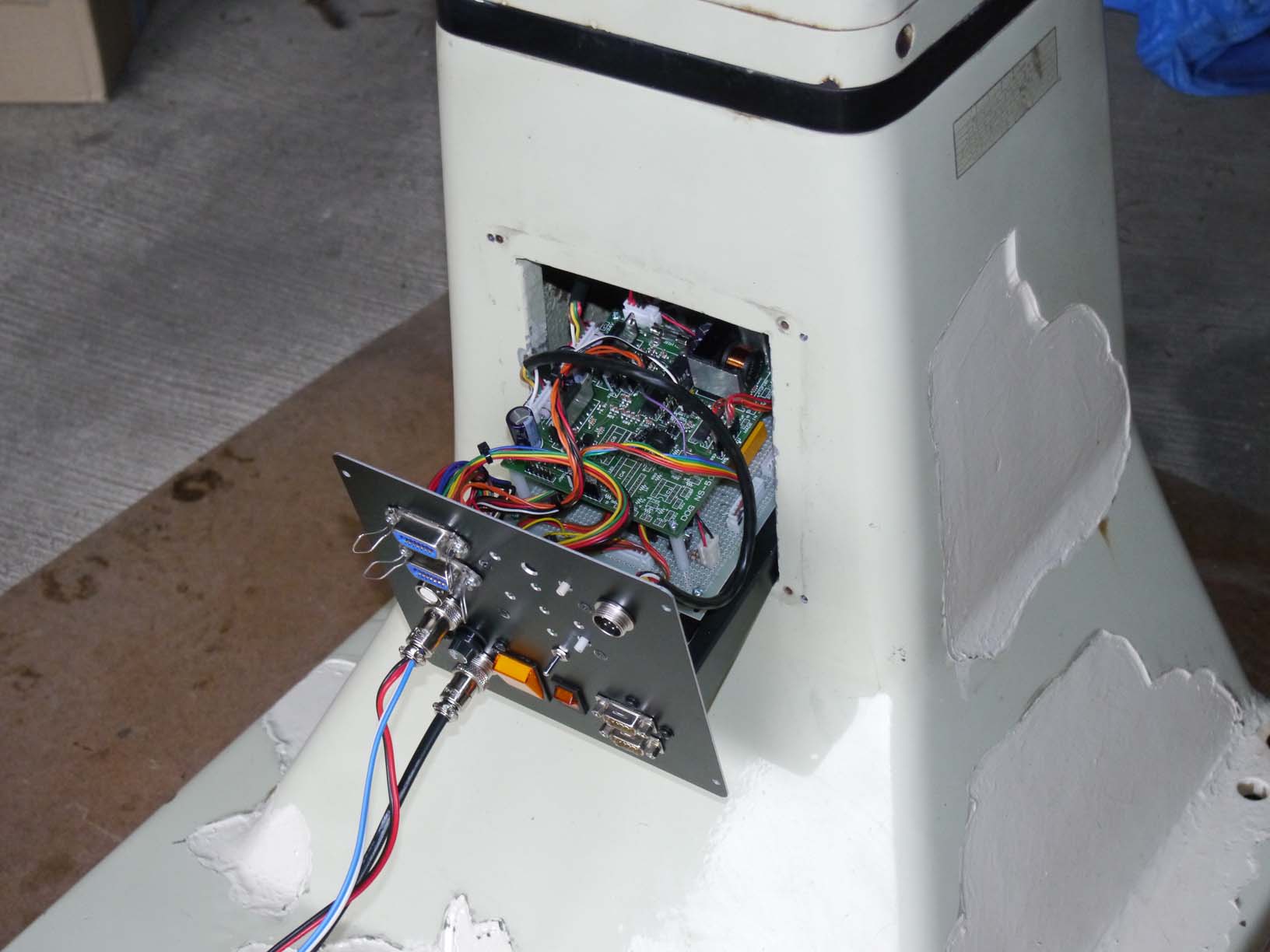
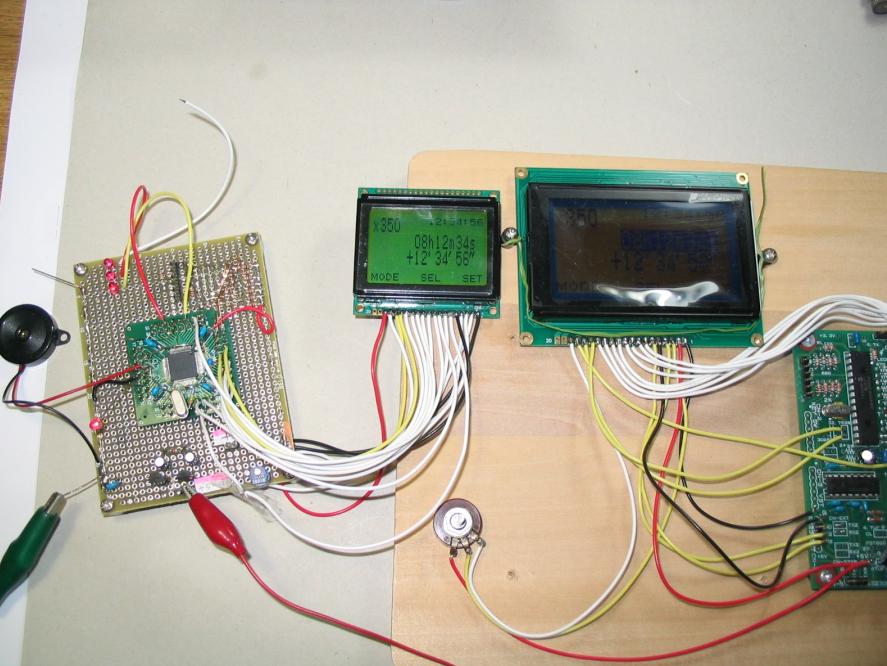
���m�r�|�T�O�O�O�Ɖt���p�l������ׂĂ݂܂����B
�ʐ^�Ńp�l���̑傫����������Ǝv���܂��B�{�̂Ɏ��t���₷���傫���Ǝv���܂����B
����n���h�{�b�N�X�̊J���Ńp�l�������܂������A�����NS-5000�Ƀp�l�����t�����Ƃ������ƂƓ����ł��B
�����O���[�h�A�b�v�őΉ��ł���\��������Ǝv���܂����B
�������A�g���N�XNS-5000�i��ʌ��̂��q�l�p�j,�E���X�^�[�x�[�X�l����̂��˗���NS-501GP�ł��B
NS-501GP�͍����������܂����B�����̂��q�l�p��NS-501GP�͍���������Ă���܂��B
���A�g���N�X�͍������ɍ�Ƃ��I���\��ł��������͌��j�ɂȂ�܂��B�����������҂����������B
���V�^�n���h�{�b�N�X�̃I�v�V�����ɂ���
�J�����̐V�^�n���h�{�b�N�X�̃I�v�V�����Ƃ��Ĉȉ����������ł��B
���ӌ��A����]�Ȃǂ���܂����牽�ł����\�ł����烁�[������낵�����肢���܂��B
�P�@NS-5000�@�i���^���[�^�p0.5A�ȉ��AEM200�AEM10�ANJP
PD6XY�AGP�E�E�E�j
�Q�@�I�[�g�K�C�_�[VST�@�i�g���ݗp�j
�R�@�f�W�^���\����NS-300
�S�@���̑�
(2012,1/24)
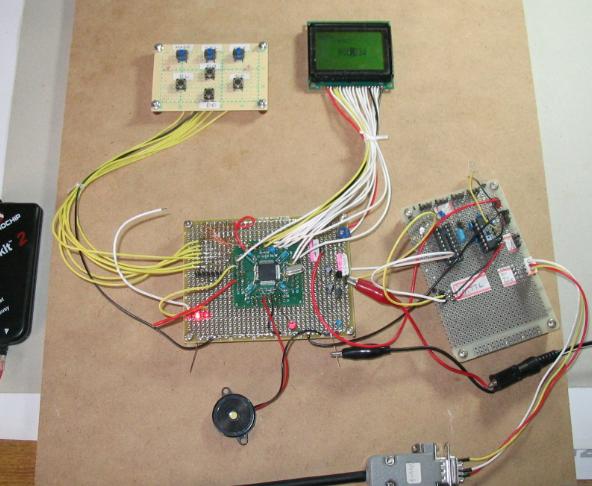
���V�^�n���h�{�b�N�̊J���pCPU�{�[�h�ʼnt���\�����ł��܂����B
�m�F�ς݂̃v���O�������ڐA���Ă����̂ŁA�����ɓ����Ǝv���Ă��܂���������ʖڂł����B����Ɠ����܂����B
��������������̂ɔ���������܂����BLCD�M���̏��Ԃƃ^�C�~���O�ɖ�肪����܂����B
�J�^���O�ɊԈႢ���������肵�āi����~�X���Ǝv���܂��j�����f�[�^�����Ăɂł��Ȃ������̂ł����A�o������v���O�������C���������肭�����܂����B
���͍�����ׂ����p�[�c�ł��B�n���h�{�b�N�X���ŁA�I�v�V�����Ƃ��Ďg���\��ł��B���Ƃł��Љ�܂��B
����傫��LCD�\������w�����܂����B�������̂̓����b�g�ł����A���₷������ł��B
�����ɁA�g�����A�C���^�[�t�F�[�X�������^�C�v��LCD���w�����܂����B��f128x64�ޯĂ͓����ł��B
�\���͔������^�C�v�ł����A�S�̂]�\�����āA�����悤�ɂ��Ă���܂��B��͂�f�J�C�̂͌��₷���ł��B
|
|
|
(2012,1/19)
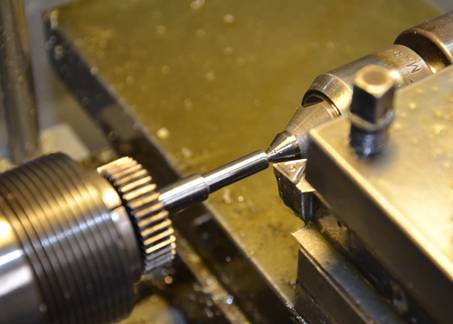
���y���^�b�N�XMS-4�@PK264A2-SG18���[�^�̒lj��H�ɂ��ďЉ�܂��B
MS-4�ԓ��V�̃E�I�[���l�W���a��φ�U�APK264�@SH�M�A�̏o�͎��a��φ�W����܂��B
��������킹��ׂɏo�͎��a��φ�U�ɐ؍킷��K�v������܂����B
�ȉ��͍�Ƃ̗l�q�ł��B���H�Z�p�A���H���x���K�v�ȍ�Ƃ��܂܂�Ă��܂��B
|
�P_�I���W�i����ԊT��.jpg |
2_���[�^�[_�r�g�M�A����.jpg |
3_SH�M�A����.jpg |
4_SH�M�A���g.jpg |
|
5_�M�A�J�V������.jpg |
6_�M�AM3�^�b�v����.jpg |
7_�M�A�o������.jpg |
8_�M�A�����@�\.jpg |
|
9_�o�͎��؍�.jpg |
10_�o�͉��H����.jpg |
11_SH�M�A�đg��.jpg |
12_SH�M�A���C����.jpg |
|
|
�g��_2.jpg |
�g��_3.jpg |
(2012,1/18)
���V�^�n���h�{�b�N�̑����ł��B
�L�[��������������C�x���g�R���g���[���Ƃ������̂��v���O���~���O���Ă��܂������A�悤�₭����Ŋ������āA
����A�J���pCPU�{�[�h���R���g���[���S�����ڐA���邱�Ƃ��ł��܂����B���܂������Ă��܂��B
�܂�CPU�{�[�h�ɉt�����Ȃ��łȂ��̂ŁA���x���R���g���[���̓�����m�F���Ă��܂��A���Ԃ���v�ł��傤�B
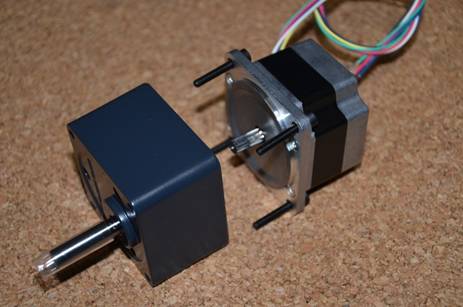
���y���^�b�N�XMS-4�ԓ��V�Ƀ��[�^�����t���܂����B
���[�^��PK264A2-SG18���̗p���܂����B���[�^�̑I��A���t�����@�A�쓮�e�X�g�̌��ʂɂ��ẮA���ƂŐ������܂��B
|
|
|
|
(2012,1/8)
���y���^�b�N�XMS-4�ԓ��V�@�������[�^���e�X�g���܂����B
MS-4�n�C�u���b�h���[�^�pNS-5000MS4HB�i���́j�̂����������������܂������A
����Ƃ͕ʂɁA���[�^���j�b�g���������Ȃ��A�������[�^�ɂ����p���ׂ܂����B
�ō����x�A�o�̓g���N�ɂ��Ĉȉ��̃e�X�g�����܂����B
MS4
�P�������x�@26.pps
�d��24.8V
�ō���3400pps
3400pps/26pps
= ��P�R�O�{��
�d��16.6V
�ō���2400pps
2400pps/26pps
=
��X�O�{��
�ǂ�����\���ȃg���N���o�Ă��܂����BPM�^�i���[�^�d���PA�j�ł����ƂĂ��p���t���ɓ����Ă��܂��B�o�͂͂P�OKg�i�ő勖�e�g���N�j����܂��B�n�C�u���b�h�ɔ�ב��x�͗��܂����A�P�O�O�{�����܂����B���p���ɂ��Ă͐\�����Ȃ��Ǝv���܂��B
�ɂ��Ȃ��̂ŁA�����������[�^�ڑ��p�̃R�l�N�^�𒍕����܂����B
MS-4�p�̏������f�[�^���쐬����A�����ɐ��i���ł��܂��B
�ǂꂮ�炢�̂��v�]�����邩���ׂĂ݂����Ǝv���Ă��܂��B
(2012,1/7)
�����܂��Ă��߂łƂ��������܂��B
���N���ǂ����i���߂����ĊJ���𑱂��܂��B
��낵�����肢���܂��B
��NS-5000EM200HB�̎ʐ^�𑗂��Ē����܂����B
NS-5000EM200����EM200HB�փO���[�h�A�b�v���܂����B
�X�s�[�h�A�b�v�i�R�T�O�{���j�������Ƀo�b�N���b�V���̉e�������Ȃ��Ȃ����Ƃ��A�������������Ă��܂��B
�����p�l�����g���܂����̂Őԓ��V�̊O���͓����ł������\�ɈႢ������܂��B
�f���炵���]�����ł��B
|
|
EM200HB���[�^���j�b�g���t���ɂ��āA���q�l����ȉ��̃��[�����܂����B
1�@����EM200�ŗL�̖��ł����A�����̃��[�^���j�b�g�p�x�[�X�����H����Ă��܂����B
�@�����̕Е����ꕔ����ē��l�̉��H��EM200HB���[�^���j�b�g�p�x�[�X�Ɏ{���Ȃ���
�@���Ԃ̂��ݍ��킹���ł��܂���ł����B���[�J�[�ł̉��H�Ǝv���܂��B�Q�l�ɉ摜�𑗂�܂��B
���̂悤�ȃP�[�X�͏��߂Ăł����̂ŁA�Q�l�Ƃ��Ďʐ^���ڂ��܂��B
|
|
|
��PENTAX
MS-4�̂����������������܂����B(2011,�P2/17�Q��)
���[�^���j�b�g���t�����@�ɂ��āA���Ƃł��Љ�܂��B
���T�C�g�����ǂ���\��ł��B
�߂������ɁA�����ƌ��₷���A�킩��₷���T�C�g���߂����ĉ������܂��B
��������̂��q�l���炲�ӌ��A����]�̃��[�������������Ă��܂��B
�������Q�l�ɂ��Ȃ���A�T�C�g�̍\���A�戵�������A�Q�l�����ȂǂɎ�����Ă����\��ł��B
�܂������A�o�[�W�����A�b�v�v���O�����ȂǁA�_�E�����[�h��p�̃y�[�W��V���ɍ��܂��B
���V�^�n���h�{�b�N�̑����ł��B
�J���̕��͏����ł��B�����ɃR���g���[�����[�h�̉�ʂ�����Č��܂����B
�v���O���~���O�̕��͂܂��܂������ł��B
���ʂ̖ڕW�Ƃ��āA�S��ނ̃R���g���[�����J�����Ă��܂����A�C�x���g�ȊO�͂قڊ������܂����B
�P�@���x���R���g���[��
�@�@�t���Ƀe�L�X�g�A�����Ȃǂ�\�����܂��B
�Q�@�^�C�}�[�R���g���[��
�@�@�v���O�����A��ʂɕω������܂��B
�R�@�C�x���g�R���g���[��
�@�@�L�[������������܂��B
�S�@�^�X�N�R���g���[��
�@�@�e��v���O�������L�q���܂��B
���̃z�[���y�[�W�Ō��J����n�[�h�E�G�A�[�A�\�t�g�E�G�A�[�Ȃǂ̏��A
�f�[�^�A���̉����A���p�������̂̌��J��c���ړI�̔̔��Ȃǂ����f�肵�܂��B
[HOME]