

 今日はNS-5000ATLUX(埼玉県狭山市)、NS-5000BIPOLAR(アストロショプAu様)を発送します。
NS-5000BIPOLARは2台目、ご希望で1/16マイクロステップ(固定)を変更できるようにしました。 |
今日はNS-5000ATLUX(埼玉県狭山市)、NS-5000BIPOLAR(アストロショプAu様)を発送します。
NS-5000BIPOLARは2台目、ご希望で1/16マイクロステップ(固定)を変更できるようにしました。
NS-5000BIPOLARは2台目、ご希望で1/16マイクロステップ(固定)を変更できるようにしました。
 |  |
今日、5相版ベルト仕様NS-5000一式が(やっと)到着しました。5相モータ用NS-5000PK543AW(暫定)、モータ接続ケーブル、ハンドボックス、ACアダプタ、専用収納ケースです。
 |  |
5相版NS-5000を発送しました(福島県いわき市)。動作テストをしました。申し分ありません。恒星時はほぼ無音、無振動で、触ってやっと動いているのが分かるレベルでした。ギアは遊星歯車です。高精度、高トルクです。
5相版の場合は必ずNJPウォームギア軸受けベアリング化をお願いしています。工業用のベルトで高テンションがかかりますので必須の条件になります。
NJP_NS-5000_5相遊星歯車モータユニット 取扱説明書_Rev1
http://nskikaku.sakura.ne.jp/download/NJP_NS5000_5mt_yusei_doc_Rev1.pdf
NJP赤道儀ベアリング化作業手順書_Rev2
http://nskikaku.sakura.ne.jp/download/NJP_bearing_doc_Rev2.pdf
5相版の場合は必ずNJPウォームギア軸受けベアリング化をお願いしています。工業用のベルトで高テンションがかかりますので必須の条件になります。
NJP_NS-5000_5相遊星歯車モータユニット 取扱説明書_Rev1
http://nskikaku.sakura.ne.jp/download/NJP_NS5000_5mt_yusei_doc_Rev1.pdf
NJP赤道儀ベアリング化作業手順書_Rev2
http://nskikaku.sakura.ne.jp/download/NJP_bearing_doc_Rev2.pdf
 最近集めているドライバ基板です。
赤いの(A4988)がNS-5000BIPOLAR(暫定)で使用しています。16マイクロステップ、カレントダウン調整ボリュームで振動の少ない恒星時運転ができます。
白色(TMC2100)は新しく購入したもので、
同じく16マイクロステップですが、ステップ間を256ステップ補完し、A4988よりも低振動だそうです。
どの程度か興味があります。
A4988+調整ボリュームの場合とTMC2100を比較する予定です。
TMC2100は停止時カレントダウンがありますが、定格電流の約34%(訂正)に減少します。それに比べA4988+調整ボリュームは、赤緯停止時約30%に減少し、赤経はボリュームで0にもできます。したがって電流効率、発熱に関してはA4988が有利になります。
写真を見る通り、A4988、TMC2100は便利なバイポーラドライバーですが、小さいです。小型モータ用として使うのが安全だと感じます。下はNS-5000のドライバICです。アルミ部分は放熱器です。 |
最近集めているドライバ基板です。
赤いの(A4988)がNS-5000BIPOLAR(暫定)で使用しています。16マイクロステップ、カレントダウン調整ボリュームで振動の少ない恒星時運転ができます。
白色(TMC2100)は新しく購入したもので、
同じく16マイクロステップですが、ステップ間を256ステップ補完し、A4988よりも低振動だそうです。
どの程度か興味があります。
A4988+調整ボリュームの場合とTMC2100を比較する予定です。
TMC2100は停止時カレントダウンがありますが、定格電流の約34%(訂正)に減少します。それに比べA4988+調整ボリュームは、赤緯停止時約30%に減少し、赤経はボリュームで0にもできます。したがって電流効率、発熱に関してはA4988が有利になります。
写真を見る通り、A4988、TMC2100は便利なバイポーラドライバーですが、小さいです。小型モータ用として使うのが安全だと感じます。下はNS-5000のドライバICです。アルミ部分は放熱器です。
赤いの(A4988)がNS-5000BIPOLAR(暫定)で使用しています。16マイクロステップ、カレントダウン調整ボリュームで振動の少ない恒星時運転ができます。
白色(TMC2100)は新しく購入したもので、
同じく16マイクロステップですが、ステップ間を256ステップ補完し、A4988よりも低振動だそうです。
どの程度か興味があります。
A4988+調整ボリュームの場合とTMC2100を比較する予定です。
TMC2100は停止時カレントダウンがありますが、定格電流の約34%(訂正)に減少します。それに比べA4988+調整ボリュームは、赤緯停止時約30%に減少し、赤経はボリュームで0にもできます。したがって電流効率、発熱に関してはA4988が有利になります。
写真を見る通り、A4988、TMC2100は便利なバイポーラドライバーですが、小さいです。小型モータ用として使うのが安全だと感じます。下はNS-5000のドライバICです。アルミ部分は放熱器です。
 |  |
今日はハイブリッドモータが入荷しました。評価用NS-5000に使います。左側はNS-5000EM200HBモータユニットです。
テストは良好です。明日発送します。
テストは良好です。明日発送します。
 TMC2100でNS5000用のバイポーラドライバを作りました。明日テストします。これでハイブリッドモータPKP243A1、PKP223A1を動かしてみます。振動、トルクの状態と最高速度を調べる予定です。結果が良ければ可能性が広がります。
16マイクロステップ spredCycle 、stealthCycle で試します。 |
TMC2100でNS5000用のバイポーラドライバを作りました。明日テストします。これでハイブリッドモータPKP243A1、PKP223A1を動かしてみます。振動、トルクの状態と最高速度を調べる予定です。結果が良ければ可能性が広がります。
16マイクロステップ spredCycle 、stealthCycle で試します。
16マイクロステップ spredCycle 、stealthCycle で試します。
 NS5000でTMC2100バイポーラドライバをテストしました。
データは不十分ですがが得られました。
TMC2100はspredCycle 、stealthChopという駆動方法を選択できます。
今回ははんだ付け後に変更が出来ない事がわかり、駆動方法、ステップ数は変更できませんでした。
おそらくstealthChop?、16マイクロステップ+256マイクロステップ補完で、これは非常に低振動ですがトルクが低いのだそうです。
振動、トルク、最高速度を調べました。
NS-5000PKP264A2NJPベルト仕様の初期化データでテストしました。恒星時は100ppsです。モータはNS-5000EM200HB用モータユニットを使いました。
電源24V。最高速度は、
PKP243A1 17.5Kpps
PKP223A1 24Kpps
電源16.6Vでは、
PKP243A1 16Kpps
PKP223A1 22Kpps
24Vの場合、、恒星時100ppsなら、赤経175倍速、赤緯240倍速になります。この時平ギアをギュッと手で抑えましたが脱調しませんでした。また、恒星時駆動は非常に静かで、回っているのが分からないレベルでした。これは先日の5相版NS-5000の5相モータに相当するレベルでした。
確かに低振動です。 |
NS5000でTMC2100バイポーラドライバをテストしました。
データは不十分ですがが得られました。
TMC2100はspredCycle 、stealthChopという駆動方法を選択できます。
今回ははんだ付け後に変更が出来ない事がわかり、駆動方法、ステップ数は変更できませんでした。
おそらくstealthChop?、16マイクロステップ+256マイクロステップ補完で、これは非常に低振動ですがトルクが低いのだそうです。
振動、トルク、最高速度を調べました。
NS-5000PKP264A2NJPベルト仕様の初期化データでテストしました。恒星時は100ppsです。モータはNS-5000EM200HB用モータユニットを使いました。
電源24V。最高速度は、
PKP243A1 17.5Kpps
PKP223A1 24Kpps
電源16.6Vでは、
PKP243A1 16Kpps
PKP223A1 22Kpps
24Vの場合、、恒星時100ppsなら、赤経175倍速、赤緯240倍速になります。この時平ギアをギュッと手で抑えましたが脱調しませんでした。また、恒星時駆動は非常に静かで、回っているのが分からないレベルでした。これは先日の5相版NS-5000の5相モータに相当するレベルでした。
確かに低振動です。
データは不十分ですがが得られました。
TMC2100はspredCycle 、stealthChopという駆動方法を選択できます。
今回ははんだ付け後に変更が出来ない事がわかり、駆動方法、ステップ数は変更できませんでした。
おそらくstealthChop?、16マイクロステップ+256マイクロステップ補完で、これは非常に低振動ですがトルクが低いのだそうです。
振動、トルク、最高速度を調べました。
NS-5000PKP264A2NJPベルト仕様の初期化データでテストしました。恒星時は100ppsです。モータはNS-5000EM200HB用モータユニットを使いました。
電源24V。最高速度は、
PKP243A1 17.5Kpps
PKP223A1 24Kpps
電源16.6Vでは、
PKP243A1 16Kpps
PKP223A1 22Kpps
24Vの場合、、恒星時100ppsなら、赤経175倍速、赤緯240倍速になります。この時平ギアをギュッと手で抑えましたが脱調しませんでした。また、恒星時駆動は非常に静かで、回っているのが分からないレベルでした。これは先日の5相版NS-5000の5相モータに相当するレベルでした。
確かに低振動です。
 |  |  |
お客様からメールが届きました。3台のNS-501/5000をご利用いただいています。
2018/10/11
「それからキャンピグカー室内から一気に3台のNS企画製のコントローラーを制御してる状況です。右のPCは冷却cmos専用です。」
2018/10/11
「それからキャンピグカー室内から一気に3台のNS企画製のコントローラーを制御してる状況です。右のPCは冷却cmos専用です。」
 NS-5000BIPOLAR(暫定)を作りました。3台目。
TMC2100ドライバを使い、赤緯カレントダウン、赤経に調整ボリュームを付けました。
急に販売終了となり、GP用ベルトモータ入手に目処が立たなくなりました。急いで新規にベルトモータを作ります。数日中に部材がそろい製作を始める予定です。 |
NS-5000BIPOLAR(暫定)を作りました。3台目。
TMC2100ドライバを使い、赤緯カレントダウン、赤経に調整ボリュームを付けました。
急に販売終了となり、GP用ベルトモータ入手に目処が立たなくなりました。急いで新規にベルトモータを作ります。数日中に部材がそろい製作を始める予定です。
TMC2100ドライバを使い、赤緯カレントダウン、赤経に調整ボリュームを付けました。
急に販売終了となり、GP用ベルトモータ入手に目処が立たなくなりました。急いで新規にベルトモータを作ります。数日中に部材がそろい製作を始める予定です。
 |  |  |
お客様(石川県)のNS-5000PKP264NJPベルト仕様の動作確認を工場(群馬県)に依頼しました。その結果のメールをいただきました。参考になると思いますので、ご紹介します。
2018/10/22
「OH依頼で手元にあるお客様のNJP赤道儀に〇〇様のNS-5000一式を装着し動作確認を行いました。
使用した鏡筒はタカハシ FS-128 (D=128mm、f=1040mm)です。
極軸は電子極軸望遠鏡のPoleMasterで合せました。
最初に導入精度の確認ですがPentax XL14アイピース(X75倍になります)でシリウスを視野中心に入れ
ステラナビゲータ10で同期を取りべテルギュース⇒プロキオン⇒シリウスの順で冬の大三角を使って確認
しました。電源はDC24V/5AのACアダプターで最高速設定は#40で約430倍で行いました。
最高速に#50の約580倍では鏡筒の位置等で脱調する事がありましたので#40に設定して出荷予定です。
恒星時運転の精度確認は天の赤道付近で南中近くの星が良いのでオリオン座三ツ星の左側アルニタクで
アイピースにPentax XL-7(約150倍)で行いました。視野一杯に焦点外像が見えるようにして15分ほど
経過後に視野からズレていないかで判断しています。
テスト撮影は月明かりもありましたので冷却CCDカメラでナローバンドフィルター(Hα線、半波値=3nm)を
使い行いました。ガイド信号はガイドカメラの内蔵リレーとNS-5000のガイド端子(ST-4)を6芯ケーブルで
接続して行いましたのでガイド信号のハードウェア確認にもなったかと思います。
鏡筒:FS-128
ガイド鏡筒:Borg 45EDⅡ (f=325mm)
ガイドカメラ:ZWO ASI290MM mini (画素ピサイズ2.9μm、画素数1936x1096)
冷却CCDカメラ:FLI ML-16803 (画素サイズ9μm、画素数4096x4096)、‐30℃設定
フィルター:Croma Hα(50mm角、半波値=3nm)
ガイドソフト:MaxIm DL 、ガイド周期=2s
露出時間20分x3枚
画像処理はガイド撮影の評価ですのでDark、Flat等の補正は行っていません。
MaxIm DLは撮影画像のダウンロード中はガイドを中止してしまいます。
私のカメラの場合は約1分弱ダウンロードに掛かります。
今回は3フレーム撮影していますが3枚をフレームでコンポジットしていますので恒星時精度が良くないと
星像が点像になりません。(実際の作品ではフレーム合成でなく自動アライメント機能を使ったコンポジット
を行いますので恒星時の僅かなズレは問題になる事は無いと考えます)
ガイド精度も良好ですのでNS-5000は期待通りの性能を発揮していると判断しました。
テストの様子(昼間撮りました)、ガイドソフトのハードコピー、テスト撮影画像を参考に添付致します。」
2018/10/22
「OH依頼で手元にあるお客様のNJP赤道儀に〇〇様のNS-5000一式を装着し動作確認を行いました。
使用した鏡筒はタカハシ FS-128 (D=128mm、f=1040mm)です。
極軸は電子極軸望遠鏡のPoleMasterで合せました。
最初に導入精度の確認ですがPentax XL14アイピース(X75倍になります)でシリウスを視野中心に入れ
ステラナビゲータ10で同期を取りべテルギュース⇒プロキオン⇒シリウスの順で冬の大三角を使って確認
しました。電源はDC24V/5AのACアダプターで最高速設定は#40で約430倍で行いました。
最高速に#50の約580倍では鏡筒の位置等で脱調する事がありましたので#40に設定して出荷予定です。
恒星時運転の精度確認は天の赤道付近で南中近くの星が良いのでオリオン座三ツ星の左側アルニタクで
アイピースにPentax XL-7(約150倍)で行いました。視野一杯に焦点外像が見えるようにして15分ほど
経過後に視野からズレていないかで判断しています。
テスト撮影は月明かりもありましたので冷却CCDカメラでナローバンドフィルター(Hα線、半波値=3nm)を
使い行いました。ガイド信号はガイドカメラの内蔵リレーとNS-5000のガイド端子(ST-4)を6芯ケーブルで
接続して行いましたのでガイド信号のハードウェア確認にもなったかと思います。
鏡筒:FS-128
ガイド鏡筒:Borg 45EDⅡ (f=325mm)
ガイドカメラ:ZWO ASI290MM mini (画素ピサイズ2.9μm、画素数1936x1096)
冷却CCDカメラ:FLI ML-16803 (画素サイズ9μm、画素数4096x4096)、‐30℃設定
フィルター:Croma Hα(50mm角、半波値=3nm)
ガイドソフト:MaxIm DL 、ガイド周期=2s
露出時間20分x3枚
画像処理はガイド撮影の評価ですのでDark、Flat等の補正は行っていません。
MaxIm DLは撮影画像のダウンロード中はガイドを中止してしまいます。
私のカメラの場合は約1分弱ダウンロードに掛かります。
今回は3フレーム撮影していますが3枚をフレームでコンポジットしていますので恒星時精度が良くないと
星像が点像になりません。(実際の作品ではフレーム合成でなく自動アライメント機能を使ったコンポジット
を行いますので恒星時の僅かなズレは問題になる事は無いと考えます)
ガイド精度も良好ですのでNS-5000は期待通りの性能を発揮していると判断しました。
テストの様子(昼間撮りました)、ガイドソフトのハードコピー、テスト撮影画像を参考に添付致します。」
 NS-501GPのオートガイド精度、恒星時追尾精度等について、お客様(高知県)からメールをいただいていましので、ご紹介します。GP/GPD2赤道儀です。
2018/03/03
「GPD2では、今のところ実際の星を使って動作確認ができました。天気良くなったらNJPでテストするつもりです。
Cartes du CieではLX200の設定で正常動作いたしました。(ステラナビゲーターではLX200に戻しての検証はまだしていません。)
思わぬ副産物で、GPD2のガイド性能が一気にアップしました。7kg程度のロシア製のマクストフ鏡筒をのっけて、ガイド誤差はほとんど±1秒以内に収まっていました。DD-3コントローラーよりも倍程度PHD2上のグラフではいいデーターです。画像は2分30秒間のプロットです。」
2018/10/20 18:10 件名: 月追尾モード
「ちょっと月の撮影始めたんで、cmosでの拡大画面見ながらリアルタイムで現物合わせでパラメーターいじくってみました。赤経方向のズレはほぼなくなりました。bluetoorhでつながっていてPCから簡単に書きかえられて、なかなかフレキシブルなシステムですね。使えば使うほど、優れものと感じています。
昨夜撮影した月の写真です。ALTER-7N(18cm マクストフニュートン)にAstroStreet ED 2x 2インチバローつけてFujiのX-T20で連写して12枚をスタッキングしてみました。追尾が正確になくなった分、シーングは2/5程度に関わらず微細になった気がします。PC画面向けに月を寝かせています。ハンドボックスは意図的に不具合のあったものを使っていますが今のところ症状は出ません。」
2018/10/22 件名: 月追尾モード
「ちなみに、GPD2での月の追尾でのパラメータ値は
#:=&RA05=339A#です。(恒星時駆動のデフォルトは32B9)
なお、「初期データー コマンド例」ではGPは34A5(計算値でしょう)となってましたが私のGPD2では逆方向にけっこうずれたので、現物合わせで定まったのが、この数値でした。
この方法で、GP2、GPD2、NJPの恒星時駆動の微調整をこれも現物合わせでやってみたいと思います。うまくいけば赤経の追尾の精度は上がるものと思います。ブラックボックスでなく自分でコントロールできる機材は貴重な存在です。」 |
NS-501GPのオートガイド精度、恒星時追尾精度等について、お客様(高知県)からメールをいただいていましので、ご紹介します。GP/GPD2赤道儀です。
2018/03/03
「GPD2では、今のところ実際の星を使って動作確認ができました。天気良くなったらNJPでテストするつもりです。
Cartes du CieではLX200の設定で正常動作いたしました。(ステラナビゲーターではLX200に戻しての検証はまだしていません。)
思わぬ副産物で、GPD2のガイド性能が一気にアップしました。7kg程度のロシア製のマクストフ鏡筒をのっけて、ガイド誤差はほとんど±1秒以内に収まっていました。DD-3コントローラーよりも倍程度PHD2上のグラフではいいデーターです。画像は2分30秒間のプロットです。」
2018/10/20 18:10 件名: 月追尾モード
「ちょっと月の撮影始めたんで、cmosでの拡大画面見ながらリアルタイムで現物合わせでパラメーターいじくってみました。赤経方向のズレはほぼなくなりました。bluetoorhでつながっていてPCから簡単に書きかえられて、なかなかフレキシブルなシステムですね。使えば使うほど、優れものと感じています。
昨夜撮影した月の写真です。ALTER-7N(18cm マクストフニュートン)にAstroStreet ED 2x 2インチバローつけてFujiのX-T20で連写して12枚をスタッキングしてみました。追尾が正確になくなった分、シーングは2/5程度に関わらず微細になった気がします。PC画面向けに月を寝かせています。ハンドボックスは意図的に不具合のあったものを使っていますが今のところ症状は出ません。」
2018/10/22 件名: 月追尾モード
「ちなみに、GPD2での月の追尾でのパラメータ値は
#:=&RA05=339A#です。(恒星時駆動のデフォルトは32B9)
なお、「初期データー コマンド例」ではGPは34A5(計算値でしょう)となってましたが私のGPD2では逆方向にけっこうずれたので、現物合わせで定まったのが、この数値でした。
この方法で、GP2、GPD2、NJPの恒星時駆動の微調整をこれも現物合わせでやってみたいと思います。うまくいけば赤経の追尾の精度は上がるものと思います。ブラックボックスでなく自分でコントロールできる機材は貴重な存在です。」
2018/03/03
「GPD2では、今のところ実際の星を使って動作確認ができました。天気良くなったらNJPでテストするつもりです。
Cartes du CieではLX200の設定で正常動作いたしました。(ステラナビゲーターではLX200に戻しての検証はまだしていません。)
思わぬ副産物で、GPD2のガイド性能が一気にアップしました。7kg程度のロシア製のマクストフ鏡筒をのっけて、ガイド誤差はほとんど±1秒以内に収まっていました。DD-3コントローラーよりも倍程度PHD2上のグラフではいいデーターです。画像は2分30秒間のプロットです。」
2018/10/20 18:10 件名: 月追尾モード
「ちょっと月の撮影始めたんで、cmosでの拡大画面見ながらリアルタイムで現物合わせでパラメーターいじくってみました。赤経方向のズレはほぼなくなりました。bluetoorhでつながっていてPCから簡単に書きかえられて、なかなかフレキシブルなシステムですね。使えば使うほど、優れものと感じています。
昨夜撮影した月の写真です。ALTER-7N(18cm マクストフニュートン)にAstroStreet ED 2x 2インチバローつけてFujiのX-T20で連写して12枚をスタッキングしてみました。追尾が正確になくなった分、シーングは2/5程度に関わらず微細になった気がします。PC画面向けに月を寝かせています。ハンドボックスは意図的に不具合のあったものを使っていますが今のところ症状は出ません。」
2018/10/22 件名: 月追尾モード
「ちなみに、GPD2での月の追尾でのパラメータ値は
#:=&RA05=339A#です。(恒星時駆動のデフォルトは32B9)
なお、「初期データー コマンド例」ではGPは34A5(計算値でしょう)となってましたが私のGPD2では逆方向にけっこうずれたので、現物合わせで定まったのが、この数値でした。
この方法で、GP2、GPD2、NJPの恒星時駆動の微調整をこれも現物合わせでやってみたいと思います。うまくいけば赤経の追尾の精度は上がるものと思います。ブラックボックスでなく自分でコントロールできる機材は貴重な存在です。」
西岡定彦さんが近況アップデートを投稿しました。
NS-5000BIPOLAR(A4988)とNS-5000BIPOLAR/TMC2100についてGPD赤道儀による動作テストのレポートをいただきました。(工場、群馬県)
NS-5000BIPOLAR/TMC2100は良好な結果がでています。
NS-5000ではTMC2100による駆動方法を、サイレントマイクロステップ駆動と呼んで区別することにします。
例えばPKP243 恒星時100pps(16マイクロステップ)で駆動している場合、サイレントマイクロステップに置き換えると25600pps相当になります。
2018/10/25
「>それからNS-5000BIPOLAR、NS-5000BIPOLAR/TMC2100はどんな感じですか?
>簡単なレポートでも助かります。
現在もテスト中ですが途中経過を簡単にまとめたのでご提示します。
当初A4988 DC12Vでそれなりに高速で動いているとお伝えしたと思うのですが眼視で見てみると赤道儀バックラッシュが大きい事に気づきテスト撮影でもガイディングソフトの
バックラッシュキャリブレーションが取れないような状態でした。
そこでGP-D赤道儀をOHしました(分解、洗浄、再グリースアップと伴にウォームホイールのラッピング研磨を実施)ウォームネジの与圧調整も押引きネジの再調整を行いバックラッシュはかなり小さくなりました。
OH後はモーター側からみるとウォームギアのフリクションが重くなっているようでA4988で12Vでは恒星時と低速、中速まではOKですが最高速では脱調しまくりで使い物になりません。
電源を24Vに上げるとだいぶ良いのですがX500でも鏡筒の向きにより脱調します。
GP-D赤道儀では最大重量の鏡筒ですがセット販売されていたVAISAC鏡筒ですので脱調するのは拙い気がします。
もっともスカイセンサー2000PCもトルク不足で私はギア比をX1.5にしてトルク増加の改造をしていました。
TMC2100はA4988からみるとトルクフルで無音、無振動で素晴らしいです。
12Vでも最高速をX200程度まで落とせば何とか動いてくれました。24VではX700で動いてくれました。
音もそうですが鏡筒を触ってみて振動を全然感じませんのでNS-5000もこのドライバーを標準にされたら良いのではと思もってしまいます。」
NS-5000BIPOLAR/TMC2100は良好な結果がでています。
NS-5000ではTMC2100による駆動方法を、サイレントマイクロステップ駆動と呼んで区別することにします。
例えばPKP243 恒星時100pps(16マイクロステップ)で駆動している場合、サイレントマイクロステップに置き換えると25600pps相当になります。
2018/10/25
「>それからNS-5000BIPOLAR、NS-5000BIPOLAR/TMC2100はどんな感じですか?
>簡単なレポートでも助かります。
現在もテスト中ですが途中経過を簡単にまとめたのでご提示します。
当初A4988 DC12Vでそれなりに高速で動いているとお伝えしたと思うのですが眼視で見てみると赤道儀バックラッシュが大きい事に気づきテスト撮影でもガイディングソフトの
バックラッシュキャリブレーションが取れないような状態でした。
そこでGP-D赤道儀をOHしました(分解、洗浄、再グリースアップと伴にウォームホイールのラッピング研磨を実施)ウォームネジの与圧調整も押引きネジの再調整を行いバックラッシュはかなり小さくなりました。
OH後はモーター側からみるとウォームギアのフリクションが重くなっているようでA4988で12Vでは恒星時と低速、中速まではOKですが最高速では脱調しまくりで使い物になりません。
電源を24Vに上げるとだいぶ良いのですがX500でも鏡筒の向きにより脱調します。
GP-D赤道儀では最大重量の鏡筒ですがセット販売されていたVAISAC鏡筒ですので脱調するのは拙い気がします。
もっともスカイセンサー2000PCもトルク不足で私はギア比をX1.5にしてトルク増加の改造をしていました。
TMC2100はA4988からみるとトルクフルで無音、無振動で素晴らしいです。
12Vでも最高速をX200程度まで落とせば何とか動いてくれました。24VではX700で動いてくれました。
音もそうですが鏡筒を触ってみて振動を全然感じませんのでNS-5000もこのドライバーを標準にされたら良いのではと思もってしまいます。」
 NS-5000MS55i(千葉市緑区)、NS501/5000(スターベース様、神奈川県横浜市)製作中です。MS55iはPK243A1サイレントマイクロステップ駆動(1A)します。
ケース加工はだいたい完了、ドライバ基板にちいさな放熱器が付属していますが、それでは安心できないので、アルミフレーム、板で放熱器を自作しています。上の青いのが熱伝導テープ、グリースです。 |
NS-5000MS55i(千葉市緑区)、NS501/5000(スターベース様、神奈川県横浜市)製作中です。MS55iはPK243A1サイレントマイクロステップ駆動(1A)します。
ケース加工はだいたい完了、ドライバ基板にちいさな放熱器が付属していますが、それでは安心できないので、アルミフレーム、板で放熱器を自作しています。上の青いのが熱伝導テープ、グリースです。
ケース加工はだいたい完了、ドライバ基板にちいさな放熱器が付属していますが、それでは安心できないので、アルミフレーム、板で放熱器を自作しています。上の青いのが熱伝導テープ、グリースです。
 |  |  |
NS-501GP2セット、NS-5000発送しました。今日はNS-5000MS55i(千葉市緑区)を送ります。
NS-5000MS55iはサイレントマイクロステップ駆動します。
テストではPK223U09A-SG36ハーフコイル接続1A、電源24Vで35Kppsまで動きました。
MS55i赤道儀はPK243A1、恒星時93ppsで駆動します.モータは異なりますが、約350倍速ぐらいで自動導入できる可能性があると思います。
放熱器は金属スペーサで両側から固定して、熱をケースに逃がすようにしました。1時間連続駆動しましたが、ほんのりと暖かくなる程度でした。
これでバイポーラ1A駆動ができることを確認しました。
また、PK/PKP264A2など、2Aユニポーラモータでもフルコイル接続にすれば(フルコイルでは半分の1AでOKです)駆動できることがになります。
それから、ペンタックスMS55iは恒星時93ppsですが、実力は23800pps相当になります。
NS-5000MS55iはサイレントマイクロステップ駆動します。
テストではPK223U09A-SG36ハーフコイル接続1A、電源24Vで35Kppsまで動きました。
MS55i赤道儀はPK243A1、恒星時93ppsで駆動します.モータは異なりますが、約350倍速ぐらいで自動導入できる可能性があると思います。
放熱器は金属スペーサで両側から固定して、熱をケースに逃がすようにしました。1時間連続駆動しましたが、ほんのりと暖かくなる程度でした。
これでバイポーラ1A駆動ができることを確認しました。
また、PK/PKP264A2など、2Aユニポーラモータでもフルコイル接続にすれば(フルコイルでは半分の1AでOKです)駆動できることがになります。
それから、ペンタックスMS55iは恒星時93ppsですが、実力は23800pps相当になります。
 パーツが到着しました。右側の3台は、NS-501GP,NS-501NJP(スターベース様)とNS-5000GPかEM200HB?(鹿児島市)どちらか、またはどちらにもなる予定です。 |
パーツが到着しました。右側の3台は、NS-501GP,NS-501NJP(スターベース様)とNS-5000GPかEM200HB?(鹿児島市)どちらか、またはどちらにもなる予定です。
 NS-302(Digital Setting Circles)を作りました。USBとbluetoothに対応します。
特徴ですが、
1 赤経、赤緯エンコーダを付けて座標がわかります。
2 ステラナビ、SkySafari・・に対応、位置が表示されます。
3 USB,bluetoothは独立しており同時に星図アプリに接続可能。
4 NS-302は最大4MBのファイルシステムがあります。
その中にNS-302初期化データファイル、テキストファイル・・等のファイルを作成、削除、名前変更、テキストアッペンドができます。
5 NS-302は4つのシリアルデバイスを持ちます。
USB,bluetooth,シリアル1,シリアル2
6 各シリアルデバイスからファイルにテキストを転送できます。
7 シリアル1,2は、それぞれNS-501/5000(LX200互換機)と接続することができます。シリアル1はUSB,シリアル2はbluetoothに対応。
8 USB,bluetoothそれぞれの星図アプリから、シリアル1,2のNS-501/5000を自動導入できます。
9 最終的にはNS-302を更に拡張して、NS-5000用ユニットしてNS-5000に内蔵する予定です。
10 それからNS-501/5000(LX200互換機)をアライメントした場合、自動的にNS-302もアライメントされます。
外部のスイッチ(信号、コマンド)によりシリアル1,2に接続したNS-501/5000をNS-302の座標でアライメントができます。
11 それからNS-302はNS-5000と一部共通するコマンドがあり、NS5000かんたん設定を利用して、かんたんにパラメータの設定、確認ができます。ファイルもかんたんに書き込みできます。
少し長くなりました。まだいろいろあるのですが、
あとで説明図、コマンドをご紹介します。
写真左がarduino Nano (ごく基本的なNS302、bluetoothなし)、右は開発中のNS-302です。ほとんどCPU基板だけで実現しています。 |
NS-302(Digital Setting Circles)を作りました。USBとbluetoothに対応します。
特徴ですが、
1 赤経、赤緯エンコーダを付けて座標がわかります。
2 ステラナビ、SkySafari・・に対応、位置が表示されます。
3 USB,bluetoothは独立しており同時に星図アプリに接続可能。
4 NS-302は最大4MBのファイルシステムがあります。
その中にNS-302初期化データファイル、テキストファイル・・等のファイルを作成、削除、名前変更、テキストアッペンドができます。
5 NS-302は4つのシリアルデバイスを持ちます。
USB,bluetooth,シリアル1,シリアル2
6 各シリアルデバイスからファイルにテキストを転送できます。
7 シリアル1,2は、それぞれNS-501/5000(LX200互換機)と接続することができます。シリアル1はUSB,シリアル2はbluetoothに対応。
8 USB,bluetoothそれぞれの星図アプリから、シリアル1,2のNS-501/5000を自動導入できます。
9 最終的にはNS-302を更に拡張して、NS-5000用ユニットしてNS-5000に内蔵する予定です。
10 それからNS-501/5000(LX200互換機)をアライメントした場合、自動的にNS-302もアライメントされます。
外部のスイッチ(信号、コマンド)によりシリアル1,2に接続したNS-501/5000をNS-302の座標でアライメントができます。
11 それからNS-302はNS-5000と一部共通するコマンドがあり、NS5000かんたん設定を利用して、かんたんにパラメータの設定、確認ができます。ファイルもかんたんに書き込みできます。
少し長くなりました。まだいろいろあるのですが、
あとで説明図、コマンドをご紹介します。
写真左がarduino Nano (ごく基本的なNS302、bluetoothなし)、右は開発中のNS-302です。ほとんどCPU基板だけで実現しています。
特徴ですが、
1 赤経、赤緯エンコーダを付けて座標がわかります。
2 ステラナビ、SkySafari・・に対応、位置が表示されます。
3 USB,bluetoothは独立しており同時に星図アプリに接続可能。
4 NS-302は最大4MBのファイルシステムがあります。
その中にNS-302初期化データファイル、テキストファイル・・等のファイルを作成、削除、名前変更、テキストアッペンドができます。
5 NS-302は4つのシリアルデバイスを持ちます。
USB,bluetooth,シリアル1,シリアル2
6 各シリアルデバイスからファイルにテキストを転送できます。
7 シリアル1,2は、それぞれNS-501/5000(LX200互換機)と接続することができます。シリアル1はUSB,シリアル2はbluetoothに対応。
8 USB,bluetoothそれぞれの星図アプリから、シリアル1,2のNS-501/5000を自動導入できます。
9 最終的にはNS-302を更に拡張して、NS-5000用ユニットしてNS-5000に内蔵する予定です。
10 それからNS-501/5000(LX200互換機)をアライメントした場合、自動的にNS-302もアライメントされます。
外部のスイッチ(信号、コマンド)によりシリアル1,2に接続したNS-501/5000をNS-302の座標でアライメントができます。
11 それからNS-302はNS-5000と一部共通するコマンドがあり、NS5000かんたん設定を利用して、かんたんにパラメータの設定、確認ができます。ファイルもかんたんに書き込みできます。
少し長くなりました。まだいろいろあるのですが、
あとで説明図、コマンドをご紹介します。
写真左がarduino Nano (ごく基本的なNS302、bluetoothなし)、右は開発中のNS-302です。ほとんどCPU基板だけで実現しています。
 |  |
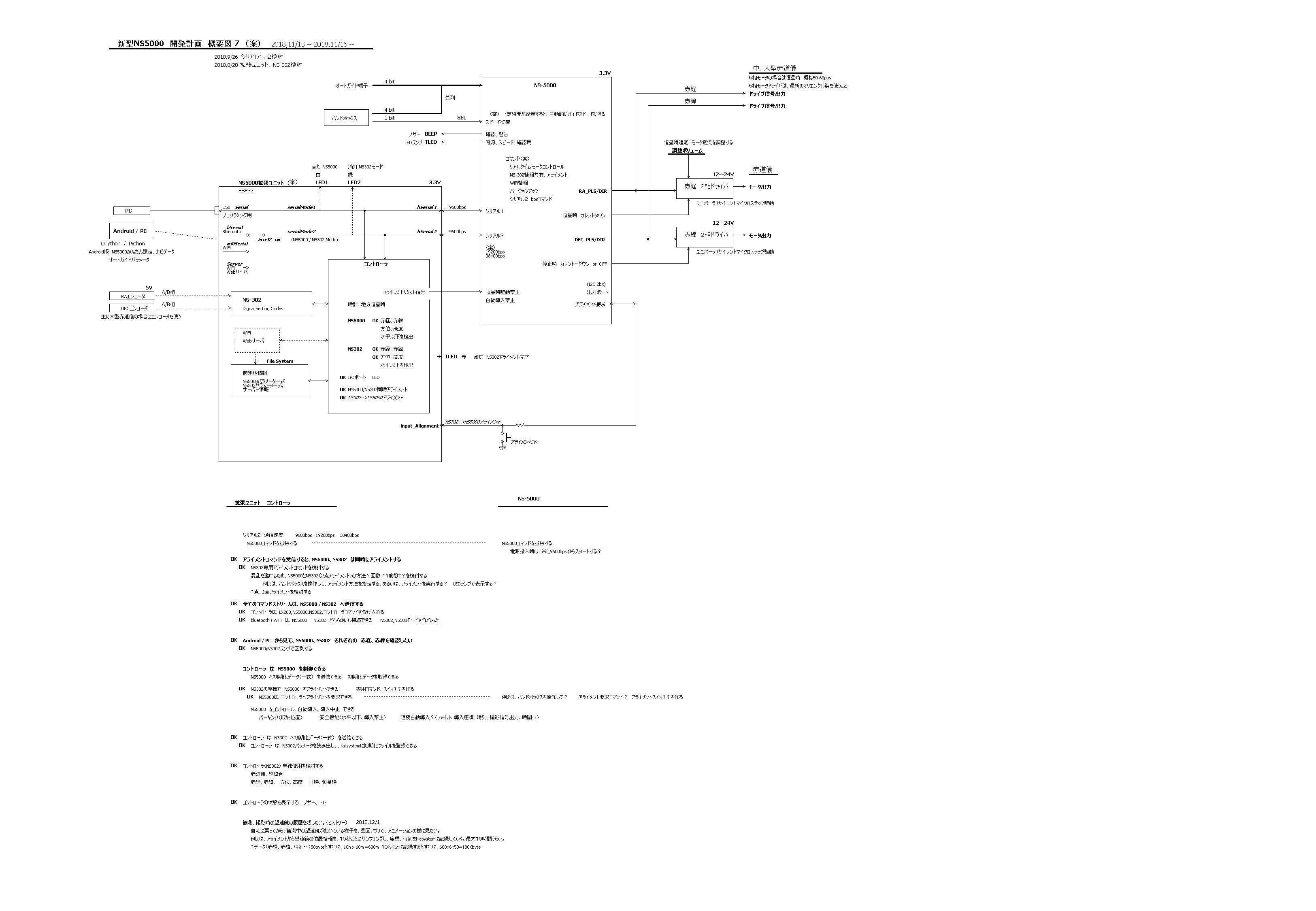
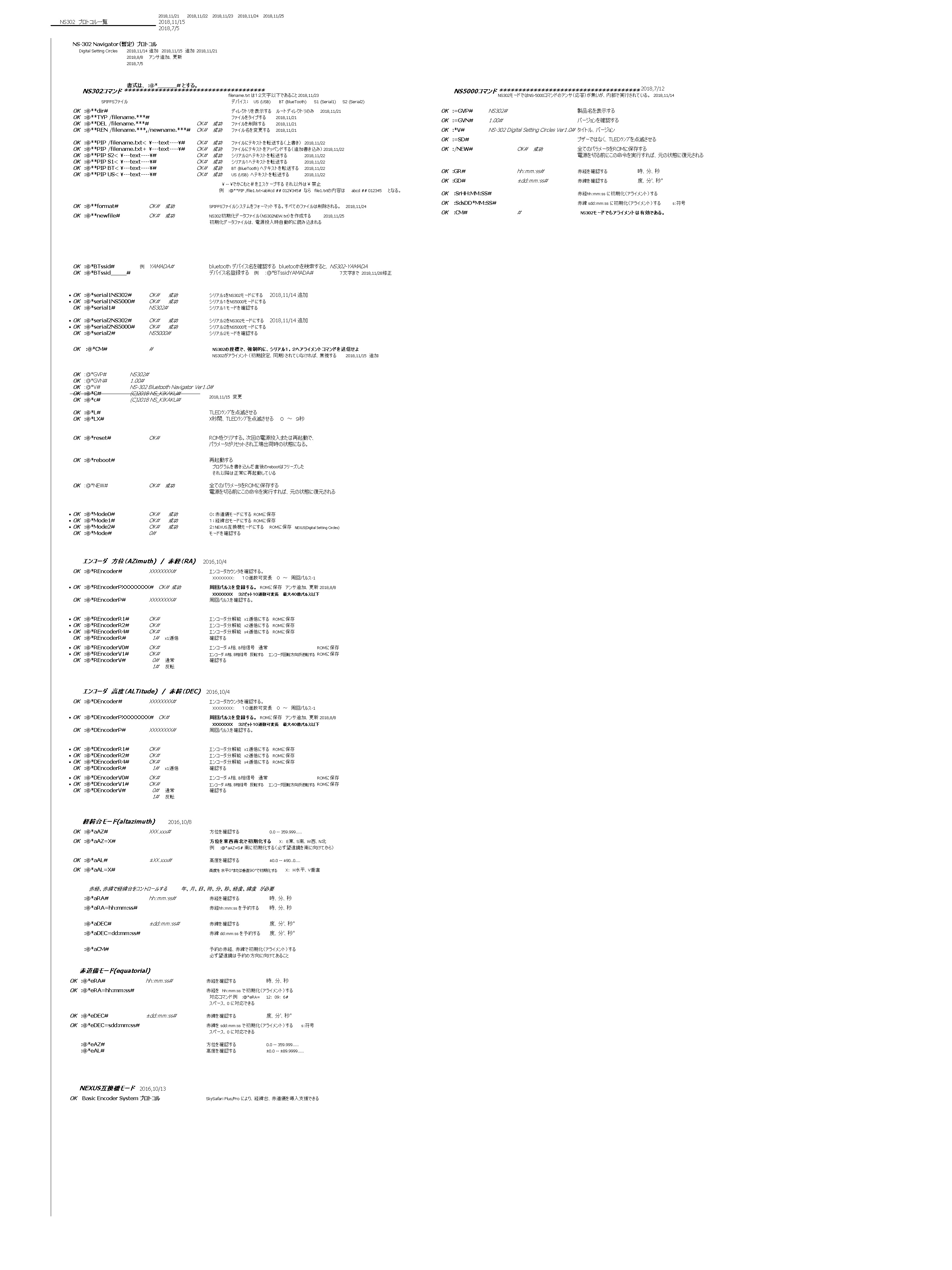
現在のNS-302コマンド一覧とNS-302説明図を載せます。
開発をすすめNS-5000に内蔵してNS-5000拡張ユニットとなります。
http://nskikaku.sakura.ne.jp/NS2018/ns5000_next.jpg
http://nskikaku.sakura.ne.jp/NS2018/NS302_spec.jpg
開発をすすめNS-5000に内蔵してNS-5000拡張ユニットとなります。
http://nskikaku.sakura.ne.jp/NS2018/ns5000_next.jpg
{kind=link}
http://nskikaku.sakura.ne.jp/NS2018/NS302_spec.jpg
{kind=link}
 26日、NS-501GP x3、NS-501NP x1(スターベース様)を発送しました。
以下はあと1,2日で発送します。
NS-5000GP_BIPOLAR(横浜市) ,
NS-5000PKP243A1(鹿児島市、当面EM200純正モータで使われます)
今年はこれで終了です。
来年は、以下2件から仕事を初める予定です。
1 NS-302 Digital Setting Circles (岡山県)
2 NS-5000ATLUX +GP兼用 (予定、和歌山県田辺市)
サイレントマイクロステップ駆動をご案内するか検討中。 |
26日、NS-501GP x3、NS-501NP x1(スターベース様)を発送しました。
以下はあと1,2日で発送します。
NS-5000GP_BIPOLAR(横浜市) ,
NS-5000PKP243A1(鹿児島市、当面EM200純正モータで使われます)
今年はこれで終了です。
来年は、以下2件から仕事を初める予定です。
1 NS-302 Digital Setting Circles (岡山県)
2 NS-5000ATLUX +GP兼用 (予定、和歌山県田辺市)
サイレントマイクロステップ駆動をご案内するか検討中。
以下はあと1,2日で発送します。
NS-5000GP_BIPOLAR(横浜市) ,
NS-5000PKP243A1(鹿児島市、当面EM200純正モータで使われます)
今年はこれで終了です。
来年は、以下2件から仕事を初める予定です。
1 NS-302 Digital Setting Circles (岡山県)
2 NS-5000ATLUX +GP兼用 (予定、和歌山県田辺市)
サイレントマイクロステップ駆動をご案内するか検討中。
 今年もよろしくお願いします。
昨日は昨年末からつづきのNS-5000PK243A1(鹿児島市)を送りました。EM200、旧アトラクス兼用になりました。
写真はお預かりしている(岡山県)タカハシ Telescope Tracer Mouse I/F Type2です。これをNS-302 Digital Setting Circlesと接続し導入支援を実現します。お客様はbluetoothでの運用をご希望されています。 |
今年もよろしくお願いします。
昨日は昨年末からつづきのNS-5000PK243A1(鹿児島市)を送りました。EM200、旧アトラクス兼用になりました。
写真はお預かりしている(岡山県)タカハシ Telescope Tracer Mouse I/F Type2です。これをNS-302 Digital Setting Circlesと接続し導入支援を実現します。お客様はbluetoothでの運用をご希望されています。
昨日は昨年末からつづきのNS-5000PK243A1(鹿児島市)を送りました。EM200、旧アトラクス兼用になりました。
写真はお預かりしている(岡山県)タカハシ Telescope Tracer Mouse I/F Type2です。これをNS-302 Digital Setting Circlesと接続し導入支援を実現します。お客様はbluetoothでの運用をご希望されています。
 今日はNS-302 実験をしました。
Telescope Tracer もDigital Setting Circlesの一種です。
比べて見ながらいい時代になったなあと思います。 |
今日はNS-302 実験をしました。
Telescope Tracer もDigital Setting Circlesの一種です。
比べて見ながらいい時代になったなあと思います。
Telescope Tracer もDigital Setting Circlesの一種です。
比べて見ながらいい時代になったなあと思います。
 これからNS-302 Digital Setting Circles基板 3枚作ります。 |
これからNS-302 Digital Setting Circles基板 3枚作ります。
 NS-302基板作りました。次は、
Telescope Tracer -->NS-302 Digital Setting Circles(岡山県)
NS-300 -->NS-302グレードアップ(アストロショップAu様)
をおこないます。 |
NS-302基板作りました。次は、
Telescope Tracer -->NS-302 Digital Setting Circles(岡山県)
NS-300 -->NS-302グレードアップ(アストロショップAu様)
をおこないます。
Telescope Tracer -->NS-302 Digital Setting Circles(岡山県)
NS-300 -->NS-302グレードアップ(アストロショップAu様)
をおこないます。
 |  |
Telescope Tracer -->NS-302 Digital Setting Circles(岡山県)は完了しました。動作テストOKです。
赤経周回パルス28800、赤緯21600
エンコーダの基本パルスを4逓倍しています。
赤経分解能は3s、赤緯1’です。
NS-302初期化データは以下のとおりです。
BlueTooth ssid
:@*BTssid#
Serial1,2 mode NS302 or NS5000
:@*serial1NS302#
:@*serial2NS302#
NS302 Mode 0(equatorial) 1(altazimuth) 2(NEXUS)
:@*Mode0#
:@*REncoderP28800#
:@*REncoderR4#
:@*REncoderV0#
:@*DEncoderP21600#
:@*DEncoderR4#
:@*DEncoderV0##
赤経周回パルス28800、赤緯21600
エンコーダの基本パルスを4逓倍しています。
赤経分解能は3s、赤緯1’です。
NS-302初期化データは以下のとおりです。
BlueTooth ssid
:@*BTssid#
Serial1,2 mode NS302 or NS5000
:@*serial1NS302#
:@*serial2NS302#
NS302 Mode 0(equatorial) 1(altazimuth) 2(NEXUS)
:@*Mode0#
:@*REncoderP28800#
:@*REncoderR4#
:@*REncoderV0#
:@*DEncoderP21600#
:@*DEncoderR4#
:@*DEncoderV0##
 |  |
アストロショップAu様(札幌市)からご依頼のNS-300 -->NS-302グレードアップは本体の改造をしました。
初期化は明日やります。
コネクタはDINコネクタの他に、Telescope Tracer と同じアストロスケール互換ミニDINコネクタが付いています。
初期化は明日やります。
コネクタはDINコネクタの他に、Telescope Tracer と同じアストロスケール互換ミニDINコネクタが付いています。
 今日NS302 3台発送しました。 |
今日NS302 3台発送しました。
 NS-302 Digital Setting Circles(岡山県)のお客様からメールが届きました。EM200でうまく動いているそうです。
2019/01/26 10:16
「昨夜はお騒がせしました。室内でのテスト運用でしたが、上々の結果でした。あの小さな躯体であれだけの機能を発揮できるとは驚きでした。あいにく今日から雪模様です。早く屋上に持ち出して星空をトレースしたいです。
エンコーダーをうまく活用できたことに感謝感激です。ありがとうございました。システムの写真を送りました。」 |
NS-302 Digital Setting Circles(岡山県)のお客様からメールが届きました。EM200でうまく動いているそうです。
2019/01/26 10:16
「昨夜はお騒がせしました。室内でのテスト運用でしたが、上々の結果でした。あの小さな躯体であれだけの機能を発揮できるとは驚きでした。あいにく今日から雪模様です。早く屋上に持ち出して星空をトレースしたいです。
エンコーダーをうまく活用できたことに感謝感激です。ありがとうございました。システムの写真を送りました。」
2019/01/26 10:16
「昨夜はお騒がせしました。室内でのテスト運用でしたが、上々の結果でした。あの小さな躯体であれだけの機能を発揮できるとは驚きでした。あいにく今日から雪模様です。早く屋上に持ち出して星空をトレースしたいです。
エンコーダーをうまく活用できたことに感謝感激です。ありがとうございました。システムの写真を送りました。」
 今夜は、先日のNS302BT Digital Setting Circles(bluetooth版)からbluetooth部分を削除し、wifiに変更しました。上手くいきました。PC,Android SkySafariから接続、表示、アライメントが成功、エンコーダもOKです。 |
今夜は、先日のNS302BT Digital Setting Circles(bluetooth版)からbluetooth部分を削除し、wifiに変更しました。上手くいきました。PC,Android SkySafariから接続、表示、アライメントが成功、エンコーダもOKです。
 |  |
NS302WIFI Digital Setting Circles(wifi版)を作っていますbluetooth版、wifi版で接続内容に違いがあります。
bluetooth版
USB ステラナビ・・
bluetooth Android SkySafari 、PC ステラナビ・・
wifi版 NS-302はwifiアクセスポイントになります。
USB ステラナビ・・
wifi接続 Android /iPad /iPhone SkySafari
Webサーバ ブラウザ(ほとんどのPC,スマホ、タブレット)
写真は、同時に、USBステラナビ、wifi接続は2台のSkySafariから接続しています。しかしwifi接続は1台になります。
昨日、wifi接続に加えてWebサーバを作りました。
これにPCとAndroidのブラウザで接続しました。
Webサーバーは同時に複数のブラウザに対応します。
シンプルなボタンを表示してみました。
ボタンをクリックするとLEDが点滅したりしてます。
ブラウザ上からパラメータ設定、変更が可能になるでしょう。
bluetooth版
USB ステラナビ・・
bluetooth Android SkySafari 、PC ステラナビ・・
wifi版 NS-302はwifiアクセスポイントになります。
USB ステラナビ・・
wifi接続 Android /iPad /iPhone SkySafari
Webサーバ ブラウザ(ほとんどのPC,スマホ、タブレット)
写真は、同時に、USBステラナビ、wifi接続は2台のSkySafariから接続しています。しかしwifi接続は1台になります。
昨日、wifi接続に加えてWebサーバを作りました。
これにPCとAndroidのブラウザで接続しました。
Webサーバーは同時に複数のブラウザに対応します。
シンプルなボタンを表示してみました。
ボタンをクリックするとLEDが点滅したりしてます。
ブラウザ上からパラメータ設定、変更が可能になるでしょう。
西岡定彦さんが近況アップデートを投稿しました。
NS-302 Digital Setting Circles(岡山県)のお客様からまたメールが届きました。
とても嬉しいです。この仕事の楽しみの一つです。
2019/01/30 21:49
「西岡 様 お世話になります。
やっとおだやかな好天気に恵まれ、望遠鏡を屋上に持ち出しました。
実星野でのns302の導入試験をしました。赤道儀はem200usd
鏡筒はタカハシFs128 F=1,040 mm アイピースは笠井CH-SWA 20mm 十字線入り暗視野照明付 見かけ視界70° 倍率52倍 実視野1.35° オリオン周辺でまずリゲルを望遠鏡にとらえステラナビゲータで同期します。ここで望遠鏡の位置に十字マークが出ました。望遠鏡のクランプヲ緩め、そのマークを手動でペテルギュウス近くまで移動します。
あとは、PC画面の左下にある、RaとDecをペテルギュースのRa,Decに合うまでコントローラーで移動させます。
接眼鏡をのぞきます。みごと、視野1,35°の中に納まっておりました。同じように、アルデバラン、M1と導入しましたが、結果は同様にすばらしいものでした。
西岡様 あらためて、お礼を申し上げます。すばらしいものを作っていただき、ありがとうございました。」
とても嬉しいです。この仕事の楽しみの一つです。
2019/01/30 21:49
「西岡 様 お世話になります。
やっとおだやかな好天気に恵まれ、望遠鏡を屋上に持ち出しました。
実星野でのns302の導入試験をしました。赤道儀はem200usd
鏡筒はタカハシFs128 F=1,040 mm アイピースは笠井CH-SWA 20mm 十字線入り暗視野照明付 見かけ視界70° 倍率52倍 実視野1.35° オリオン周辺でまずリゲルを望遠鏡にとらえステラナビゲータで同期します。ここで望遠鏡の位置に十字マークが出ました。望遠鏡のクランプヲ緩め、そのマークを手動でペテルギュウス近くまで移動します。
あとは、PC画面の左下にある、RaとDecをペテルギュースのRa,Decに合うまでコントローラーで移動させます。
接眼鏡をのぞきます。みごと、視野1,35°の中に納まっておりました。同じように、アルデバラン、M1と導入しましたが、結果は同様にすばらしいものでした。
西岡様 あらためて、お礼を申し上げます。すばらしいものを作っていただき、ありがとうございました。」
 |  |
今日、お客様からご注文のUSB-RS232Cケーブルとその他パーツ入荷しました。一緒にSTM32F303CPUボード購入しました。
写真、CPUボード3個の左がNS302 USB版(発売しません)8bit CPU、真ん中がNS-302 bluetooth,wifi版32bit CPU。右の白いのがSTM32です。小型、高性能、インターネット上のmbedで開発できます。実はこれで赤道儀、経緯台用の導入システムを作れないか検討しています。
写真、CPUボード3個の左がNS302 USB版(発売しません)8bit CPU、真ん中がNS-302 bluetooth,wifi版32bit CPU。右の白いのがSTM32です。小型、高性能、インターネット上のmbedで開発できます。実はこれで赤道儀、経緯台用の導入システムを作れないか検討しています。
 NS-302WiFi版は完成したと思います。
bluetooth版とハードの互換性がありますので、ご希望があれば、WiFi <---> bluetooth に変更いたします。
写真はUSBでステラナビに接続中、PC、Androidのブラウザで赤経、赤緯を表示しています。 |
NS-302WiFi版は完成したと思います。
bluetooth版とハードの互換性がありますので、ご希望があれば、WiFi <---> bluetooth に変更いたします。
写真はUSBでステラナビに接続中、PC、Androidのブラウザで赤経、赤緯を表示しています。
bluetooth版とハードの互換性がありますので、ご希望があれば、WiFi <---> bluetooth に変更いたします。
写真はUSBでステラナビに接続中、PC、Androidのブラウザで赤経、赤緯を表示しています。
 2019年の計画を考えています。
今年は年頭からNS-302BT/WiFi(CPU ESP32)が上手く行って気分がいいですが、以前NS-301WiFi(ESP8266)の開発を失敗しています。(原因はWiFiスタックというプログラムの完成度かも?)しっかり作業を進めます。次はNS-402WiFiを作ります。これはWiFi版のUSB--RS232Cケーブルみたいなものです。
TEMMAを含めほとんどの導入機器に対応する予定。
それからNS-302はNS-5000に内蔵するために設計しています。 |
2019年の計画を考えています。
今年は年頭からNS-302BT/WiFi(CPU ESP32)が上手く行って気分がいいですが、以前NS-301WiFi(ESP8266)の開発を失敗しています。(原因はWiFiスタックというプログラムの完成度かも?)しっかり作業を進めます。次はNS-402WiFiを作ります。これはWiFi版のUSB--RS232Cケーブルみたいなものです。
TEMMAを含めほとんどの導入機器に対応する予定。
それからNS-302はNS-5000に内蔵するために設計しています。
今年は年頭からNS-302BT/WiFi(CPU ESP32)が上手く行って気分がいいですが、以前NS-301WiFi(ESP8266)の開発を失敗しています。(原因はWiFiスタックというプログラムの完成度かも?)しっかり作業を進めます。次はNS-402WiFiを作ります。これはWiFi版のUSB--RS232Cケーブルみたいなものです。
TEMMAを含めほとんどの導入機器に対応する予定。
それからNS-302はNS-5000に内蔵するために設計しています。
 昨夜PM11時、NS302を子午線の位置でアライメントし、それからエンコーダに触れず放置しています。10時間経ちました。
縦の緑のラインが子午線で円の直径は5°です。ほとんどズレていません。これはNS302の恒星時時計の精度を示しています。しばらく続けます。 |
昨夜PM11時、NS302を子午線の位置でアライメントし、それからエンコーダに触れず放置しています。10時間経ちました。
縦の緑のラインが子午線で円の直径は5°です。ほとんどズレていません。これはNS302の恒星時時計の精度を示しています。しばらく続けます。
縦の緑のラインが子午線で円の直径は5°です。ほとんどズレていません。これはNS302の恒星時時計の精度を示しています。しばらく続けます。
 NS-302を子午線でアライメントしてから19時間経過しました。
誤差はご覧のとおりです。 |
NS-302を子午線でアライメントしてから19時間経過しました。
誤差はご覧のとおりです。
誤差はご覧のとおりです。
 NS-302WiFiは完成としました。Ver1です。区切りをつけて、次はNS-402WiFi-RS232C変換器を作りますが、NS-302、402一緒に開発します。新しい機能として外部WiFiルータに接続できるようにしました。つまりNS302はAP(アクセスポイント)として動作しながら、同時に、外部のWiFi ルータに接続できます。テストは上々です。つまりNS302はインターネットに接続しネット上のサーバーと通信できるようになりました。
NS5000BBSサーバーみたいな物を作れないだろうか?と考えています。BBSはBulletin Board Systemの略です。
参加ユーザは天文ファンだけ、今、望遠鏡で観望している人、写真を撮っている人、自動導入している人、オートガイドをしている人・・が参加するBBSです。スマホ、タブレットからNS302/402/5000WiFiを通じて、BBSへメッセージを送ったり、掲示板を参照したり、BBSメール?を交換できるシステムがあれば楽しいなあと思いました。「いいね」ボタンも面白いです。まだ構想の段階です。ごくシンプルなものであれば作れそうな気がします。ご意見がありましたらお願いします。 |
NS-302WiFiは完成としました。Ver1です。区切りをつけて、次はNS-402WiFi-RS232C変換器を作りますが、NS-302、402一緒に開発します。新しい機能として外部WiFiルータに接続できるようにしました。つまりNS302はAP(アクセスポイント)として動作しながら、同時に、外部のWiFi ルータに接続できます。テストは上々です。つまりNS302はインターネットに接続しネット上のサーバーと通信できるようになりました。
NS5000BBSサーバーみたいな物を作れないだろうか?と考えています。BBSはBulletin Board Systemの略です。
参加ユーザは天文ファンだけ、今、望遠鏡で観望している人、写真を撮っている人、自動導入している人、オートガイドをしている人・・が参加するBBSです。スマホ、タブレットからNS302/402/5000WiFiを通じて、BBSへメッセージを送ったり、掲示板を参照したり、BBSメール?を交換できるシステムがあれば楽しいなあと思いました。「いいね」ボタンも面白いです。まだ構想の段階です。ごくシンプルなものであれば作れそうな気がします。ご意見がありましたらお願いします。
NS5000BBSサーバーみたいな物を作れないだろうか?と考えています。BBSはBulletin Board Systemの略です。
参加ユーザは天文ファンだけ、今、望遠鏡で観望している人、写真を撮っている人、自動導入している人、オートガイドをしている人・・が参加するBBSです。スマホ、タブレットからNS302/402/5000WiFiを通じて、BBSへメッセージを送ったり、掲示板を参照したり、BBSメール?を交換できるシステムがあれば楽しいなあと思いました。「いいね」ボタンも面白いです。まだ構想の段階です。ごくシンプルなものであれば作れそうな気がします。ご意見がありましたらお願いします。
 NS302WiFi Digital Setting Circles の使い方をかんたんに説明します。
wifi検索するとNS302WiFiと見つかります。(WiFi部分は変更可能)それを選びパスワード ns302wifi と入力します。自動的に接続されます。
ブラウザのアドレスに192.168.5.5 と入力すると赤経、赤緯が表示されます。
SkySafari、wifiは同じ手順です。Setting画面で、
Connect via WiFi にチェック、
IP Address 192.168.5.5
Port Number 500
と入力してください。wifi接続ができるようになります。
アライメントをすれば、エンコーダによる導入支援ができます。
尚iPhone ,iPad のSkySafariも対応すると思われます。 |
NS302WiFi Digital Setting Circles の使い方をかんたんに説明します。
wifi検索するとNS302WiFiと見つかります。(WiFi部分は変更可能)それを選びパスワード ns302wifi と入力します。自動的に接続されます。
ブラウザのアドレスに192.168.5.5 と入力すると赤経、赤緯が表示されます。
SkySafari、wifiは同じ手順です。Setting画面で、
Connect via WiFi にチェック、
IP Address 192.168.5.5
Port Number 500
と入力してください。wifi接続ができるようになります。
アライメントをすれば、エンコーダによる導入支援ができます。
尚iPhone ,iPad のSkySafariも対応すると思われます。
wifi検索するとNS302WiFiと見つかります。(WiFi部分は変更可能)それを選びパスワード ns302wifi と入力します。自動的に接続されます。
ブラウザのアドレスに192.168.5.5 と入力すると赤経、赤緯が表示されます。
SkySafari、wifiは同じ手順です。Setting画面で、
Connect via WiFi にチェック、
IP Address 192.168.5.5
Port Number 500
と入力してください。wifi接続ができるようになります。
アライメントをすれば、エンコーダによる導入支援ができます。
尚iPhone ,iPad のSkySafariも対応すると思われます。
 NS-5000GP_BIPOLARのお客様からEQ5モータドライブが到着しました。
EQ5モータはGP赤道儀と互換性がありそのまま取付可能です。
これでサイレントマイクロステップ駆動します。PM型モータなので高速がどれ位出るか分かりませんが、コイル抵抗を見たら少し可能性があります。他にNS-5000ATLUX 2台(和歌山県、滋賀県)あります。明日出荷を目指します。 |
NS-5000GP_BIPOLARのお客様からEQ5モータドライブが到着しました。
EQ5モータはGP赤道儀と互換性がありそのまま取付可能です。
これでサイレントマイクロステップ駆動します。PM型モータなので高速がどれ位出るか分かりませんが、コイル抵抗を見たら少し可能性があります。他にNS-5000ATLUX 2台(和歌山県、滋賀県)あります。明日出荷を目指します。
EQ5モータはGP赤道儀と互換性がありそのまま取付可能です。
これでサイレントマイクロステップ駆動します。PM型モータなので高速がどれ位出るか分かりませんが、コイル抵抗を見たら少し可能性があります。他にNS-5000ATLUX 2台(和歌山県、滋賀県)あります。明日出荷を目指します。
 NS-402WiFiですが、SkySafari,Settings画面の「SkyFi Web Page」ボタンを押すと、NS-402のホームページが表示されます。このページでUSB--RS232CまたはWiFi--RS232C接続を選択できます。
赤経/赤緯ボタンは無効です。これで赤経、赤緯を表示するのですが、Digital Setting Circlesではありませんので意味がありません。しかし、機能はそのまま実装します、エンコーダをつければ座標表示されるようになります。オプションで対応する予定です。 |
NS-402WiFiですが、SkySafari,Settings画面の「SkyFi Web Page」ボタンを押すと、NS-402のホームページが表示されます。このページでUSB--RS232CまたはWiFi--RS232C接続を選択できます。
赤経/赤緯ボタンは無効です。これで赤経、赤緯を表示するのですが、Digital Setting Circlesではありませんので意味がありません。しかし、機能はそのまま実装します、エンコーダをつければ座標表示されるようになります。オプションで対応する予定です。
赤経/赤緯ボタンは無効です。これで赤経、赤緯を表示するのですが、Digital Setting Circlesではありませんので意味がありません。しかし、機能はそのまま実装します、エンコーダをつければ座標表示されるようになります。オプションで対応する予定です。
 bluetoothとwifiがアプリで使えないかずーと興味がありました。
たぶん無理かなあと思っていたのですが、ネットでは可能な感じです。
試しにNS402wifiの状態で、コメントアウトしていたbuetoothを有効にしたところ、予想外に、あっさり動きました。
しかし、不安定なところがありますが、bluetooth ,wifiでそれぞれAndroid SkySafari、PCのステラナビで、同時に動くことを確認できました。これはお大きな成果です。役に立ちます。
プログラムはかなりデカイです。1.2MB。
メモリマップを調整しています。 |
bluetoothとwifiがアプリで使えないかずーと興味がありました。
たぶん無理かなあと思っていたのですが、ネットでは可能な感じです。
試しにNS402wifiの状態で、コメントアウトしていたbuetoothを有効にしたところ、予想外に、あっさり動きました。
しかし、不安定なところがありますが、bluetooth ,wifiでそれぞれAndroid SkySafari、PCのステラナビで、同時に動くことを確認できました。これはお大きな成果です。役に立ちます。
プログラムはかなりデカイです。1.2MB。
メモリマップを調整しています。
たぶん無理かなあと思っていたのですが、ネットでは可能な感じです。
試しにNS402wifiの状態で、コメントアウトしていたbuetoothを有効にしたところ、予想外に、あっさり動きました。
しかし、不安定なところがありますが、bluetooth ,wifiでそれぞれAndroid SkySafari、PCのステラナビで、同時に動くことを確認できました。これはお大きな成果です。役に立ちます。
プログラムはかなりデカイです。1.2MB。
メモリマップを調整しています。
 やっとNS-5000ATLUX 2台発送しました。どちらもATLUX用ですが、リアスイッチでEM200,GPに切り替えできます。トグルスイッチによる切り替えは今度が初めてです。次はEQ5です。 |
やっとNS-5000ATLUX 2台発送しました。どちらもATLUX用ですが、リアスイッチでEM200,GPに切り替えできます。トグルスイッチによる切り替えは今度が初めてです。次はEQ5です。
 お客様がオークションで落札された特別製のNS-5000NJPです。
接触不良の対策とNS5000ハンドボックス用コネクタ取り付けを依頼されました。
これはユーザー様がNS-5000基板を使って自作されたものです。
正常に動きます。200倍速以上で動いているそうです。 |
お客様がオークションで落札された特別製のNS-5000NJPです。
接触不良の対策とNS5000ハンドボックス用コネクタ取り付けを依頼されました。
これはユーザー様がNS-5000基板を使って自作されたものです。
正常に動きます。200倍速以上で動いているそうです。
接触不良の対策とNS5000ハンドボックス用コネクタ取り付けを依頼されました。
これはユーザー様がNS-5000基板を使って自作されたものです。
正常に動きます。200倍速以上で動いているそうです。
 EQ5用モータはMT-1と互換性があり、GP赤道儀に取り付けできます。
今日はモータの信号線、他を調べました。4極モジュラージャック、バイポーラ駆動で、モータの基本ステップ角はMT-1と同様のようです。ギアヘッドは金属ギアを使っています。NS-5000ケース加工は済んで、基板はあともう少しです。 |
EQ5用モータはMT-1と互換性があり、GP赤道儀に取り付けできます。
今日はモータの信号線、他を調べました。4極モジュラージャック、バイポーラ駆動で、モータの基本ステップ角はMT-1と同様のようです。ギアヘッドは金属ギアを使っています。NS-5000ケース加工は済んで、基板はあともう少しです。
今日はモータの信号線、他を調べました。4極モジュラージャック、バイポーラ駆動で、モータの基本ステップ角はMT-1と同様のようです。ギアヘッドは金属ギアを使っています。NS-5000ケース加工は済んで、基板はあともう少しです。
 EQ5用NS-5000基板、だいぶ出来てきました。 |
EQ5用NS-5000基板、だいぶ出来てきました。
 EQ5用NS-5000はほぼ完成し、モータは正常に回転しました。恒星時はサイレントマイクロステップのおかげでほぼ音がしません。最高速度は駆動電流をいろいろ変えながらテストをしましたが60~70倍速が限度でした。
GP赤道儀MT-1でお客様がテストで65倍速と確認いただきましたが、ほぼ同じ結果になりました。
恒星時運転の状態で1時間放置し、赤経モータはおよそ40°?ぐらいに温まり、赤緯はほとんど変化なしです。モータ電流0.3A、恒星時は0.2A、赤緯は停止時0.08Aにしました。将来ハイブリッド型ベルトモータに対応できます。
モータの減速ギアはパルスを実測しMT-1と同じであることを確認しました。 |
EQ5用NS-5000はほぼ完成し、モータは正常に回転しました。恒星時はサイレントマイクロステップのおかげでほぼ音がしません。最高速度は駆動電流をいろいろ変えながらテストをしましたが60~70倍速が限度でした。
GP赤道儀MT-1でお客様がテストで65倍速と確認いただきましたが、ほぼ同じ結果になりました。
恒星時運転の状態で1時間放置し、赤経モータはおよそ40°?ぐらいに温まり、赤緯はほとんど変化なしです。モータ電流0.3A、恒星時は0.2A、赤緯は停止時0.08Aにしました。将来ハイブリッド型ベルトモータに対応できます。
モータの減速ギアはパルスを実測しMT-1と同じであることを確認しました。
GP赤道儀MT-1でお客様がテストで65倍速と確認いただきましたが、ほぼ同じ結果になりました。
恒星時運転の状態で1時間放置し、赤経モータはおよそ40°?ぐらいに温まり、赤緯はほとんど変化なしです。モータ電流0.3A、恒星時は0.2A、赤緯は停止時0.08Aにしました。将来ハイブリッド型ベルトモータに対応できます。
モータの減速ギアはパルスを実測しMT-1と同じであることを確認しました。
 特別製のNS-5000NJP修理、DIN8pコネクタ取り付け完了です。テストOKです。 |
特別製のNS-5000NJP修理、DIN8pコネクタ取り付け完了です。テストOKです。
 EQ5用NS-5000GP_BIPOLARは完成しました。EQ5の他に専用ケーブルを用意すればMT-1,GP用ベルトモータに対応可能です。 |
EQ5用NS-5000GP_BIPOLARは完成しました。EQ5の他に専用ケーブルを用意すればMT-1,GP用ベルトモータに対応可能です。
 開発中のNS-402はだいたい完成したと思います。
USB--RS232C変換ケーブルに相当するもので、USBの他にbluetooth,WiFiに対応します。かんたん操作を目指して、接続、切替は自動的に行うようにしました。
WiFiはNS402WiFi ,BluetoothはNS402BTと検索されます。
パスワードはns402wifi 、bluetoothは必要ありません。
少し動作確認します。その後仕様を決め製品化します。
NS-5000で実験しています。
TEMMA用はテストを依頼する予定です。 |
開発中のNS-402はだいたい完成したと思います。
USB--RS232C変換ケーブルに相当するもので、USBの他にbluetooth,WiFiに対応します。かんたん操作を目指して、接続、切替は自動的に行うようにしました。
WiFiはNS402WiFi ,BluetoothはNS402BTと検索されます。
パスワードはns402wifi 、bluetoothは必要ありません。
少し動作確認します。その後仕様を決め製品化します。
NS-5000で実験しています。
TEMMA用はテストを依頼する予定です。
USB--RS232C変換ケーブルに相当するもので、USBの他にbluetooth,WiFiに対応します。かんたん操作を目指して、接続、切替は自動的に行うようにしました。
WiFiはNS402WiFi ,BluetoothはNS402BTと検索されます。
パスワードはns402wifi 、bluetoothは必要ありません。
少し動作確認します。その後仕様を決め製品化します。
NS-5000で実験しています。
TEMMA用はテストを依頼する予定です。
 今日は基板製作のために久しぶりにKiCadを動かして練習しました。ほとんど忘れてたのですが、回路図エディタ、ネットリストにフットプリント割当、基板エディタは一通り操作して一応アートワークができるところまでやりました。2,3日でNS302/402製作に入れると思います。 |
今日は基板製作のために久しぶりにKiCadを動かして練習しました。ほとんど忘れてたのですが、回路図エディタ、ネットリストにフットプリント割当、基板エディタは一通り操作して一応アートワークができるところまでやりました。2,3日でNS302/402製作に入れると思います。
 NS302/402基板の製作準備ができました。明日発注します。初めて格安基板メーカで少し試作してみます。 |
NS302/402基板の製作準備ができました。明日発注します。初めて格安基板メーカで少し試作してみます。
 NS302/402基板発注しました。10枚で送料込¥ 2,469、激安です、2,3週間かかる見込みです。つづいて開発用のNS-5000特別仕様を作る予定です。 |
NS302/402基板発注しました。10枚で送料込¥ 2,469、激安です、2,3週間かかる見込みです。つづいて開発用のNS-5000特別仕様を作る予定です。
 |  |
先日、EQ5用NS-5000GP_BIPOLARを送ったお客様からメールをいただきました。上手く動いているそうです。
これでGP赤道儀用としてEQ5モータを安心してご案内できます。EQ5はMT-1モータと互換性がありGP赤道儀に取り付けできます。
2019/03/11
「こんばんは。
やっと外での実験ができました。
自動導入、オートガイドともに満足のいく結果でした!
これで安心して撮影することができます。ありがとうございました。」
これでGP赤道儀用としてEQ5モータを安心してご案内できます。EQ5はMT-1モータと互換性がありGP赤道儀に取り付けできます。
2019/03/11
「こんばんは。
やっと外での実験ができました。
自動導入、オートガイドともに満足のいく結果でした!
これで安心して撮影することができます。ありがとうございました。」
 今日は開発用NS-5000v3の回路設計を行いました。NS5000はCPU部とドライバ部2つの基板に分けて作ることにします。ドライバは従来のユニポーラとサイレントマイクロステップの2種類用意します。CPUはNS5000とNS302/402が合体するような形になります。 |
今日は開発用NS-5000v3の回路設計を行いました。NS5000はCPU部とドライバ部2つの基板に分けて作ることにします。ドライバは従来のユニポーラとサイレントマイクロステップの2種類用意します。CPUはNS5000とNS302/402が合体するような形になります。
 今日はがんばってNS-5000v3 CPUボードのアートワークやりました。もう一回チェックして発注します。 |
今日はがんばってNS-5000v3 CPUボードのアートワークやりました。もう一回チェックして発注します。
 たぶん10回以上チェックして基板製造データ(ガーバーファイル)を作りました。明日からドライバ基板をやります。 |
たぶん10回以上チェックして基板製造データ(ガーバーファイル)を作りました。明日からドライバ基板をやります。
 |  |
サイレント・マイクロステップ ドライバ基板が完了しました。
 サイレント・マイクロステップ ドライバ基板は発注完了。最後の4枚目ユニポーラはもう少しです。これが終われば一段落します。 |
サイレント・マイクロステップ ドライバ基板は発注完了。最後の4枚目ユニポーラはもう少しです。これが終われば一段落します。
 |  |
NS-5000v3用ユニポーラドライバ基板は作業が完了しました。真ん中の基板です。
 製作中のサイレント・マイクロステップドライバ基板ですが、今のNS5000CPUボードと新v3基板のどちらにもスタック可能です。たぶんあとで助かります。 |
製作中のサイレント・マイクロステップドライバ基板ですが、今のNS5000CPUボードと新v3基板のどちらにもスタック可能です。たぶんあとで助かります。
 無事、NS302/402基板到着しました。シルクが少々つぶれた感じですが、パターン、メッキ品質は全く問題無しです。チェックしながら動かしてみます。 |
無事、NS302/402基板到着しました。シルクが少々つぶれた感じですが、パターン、メッキ品質は全く問題無しです。チェックしながら動かしてみます。
 部品を実装して動かしてみました、USB,bluetooth,WiFiは正常に動きましたが、肝心なところを間違えました。
RS232C Dサブコネクタの信号をNS5000と同じにしてしまいました。これはPC側と同じにするべきでした。
NS5000はPCと接続する場合RS232Cストレートケーブルをつかいます。しかし、NS402とNS5000間は信号配置が同じなのでクロスケーブルが必要になります。1枚づつジャンパーで直します。 |
部品を実装して動かしてみました、USB,bluetooth,WiFiは正常に動きましたが、肝心なところを間違えました。
RS232C Dサブコネクタの信号をNS5000と同じにしてしまいました。これはPC側と同じにするべきでした。
NS5000はPCと接続する場合RS232Cストレートケーブルをつかいます。しかし、NS402とNS5000間は信号配置が同じなのでクロスケーブルが必要になります。1枚づつジャンパーで直します。
RS232C Dサブコネクタの信号をNS5000と同じにしてしまいました。これはPC側と同じにするべきでした。
NS5000はPCと接続する場合RS232Cストレートケーブルをつかいます。しかし、NS402とNS5000間は信号配置が同じなのでクロスケーブルが必要になります。1枚づつジャンパーで直します。
 サイレント・マイクロステップ基板製作中です。左側のドライバを使い1Aモータまで対応します。右はさっき到着したもので、サイレント・マイクロステップの効果を確認した工場から依頼されました。最大2Aまで駆動できます。NS-5000PK/PKP264A2 ギア、ベルトドライブ仕様が直接駆動できます。ただしStealthChopではなくSpreadCycleになりますが、外付けのデバイスがなく少しシンプル?です。 |
サイレント・マイクロステップ基板製作中です。左側のドライバを使い1Aモータまで対応します。右はさっき到着したもので、サイレント・マイクロステップの効果を確認した工場から依頼されました。最大2Aまで駆動できます。NS-5000PK/PKP264A2 ギア、ベルトドライブ仕様が直接駆動できます。ただしStealthChopではなくSpreadCycleになりますが、外付けのデバイスがなく少しシンプル?です。
 |  |
EM200 TEMMAにNS-5000を組み込みできないかお問い合わせがありました。出来ると思います。前から考えていた事ですがやらずに来ました。しかし今は実現したいと思います。
EM200は旧型とTEMMAでパネル部のサイズが違います。
写真からTEMMAはだいたい75x125mmぐらい?ですか?
NS-5000、サイレント・マイクロステップ、WiFi、bluetooth、RS232C(USB?)全部入りそうです。モータはそのまま使います。TEMMAのパネル、サイズ、穴位置、容積・・など調べます。情報等ありましたらお願いします。
EM200は旧型とTEMMAでパネル部のサイズが違います。
写真からTEMMAはだいたい75x125mmぐらい?ですか?
NS-5000、サイレント・マイクロステップ、WiFi、bluetooth、RS232C(USB?)全部入りそうです。モータはそのまま使います。TEMMAのパネル、サイズ、穴位置、容積・・など調べます。情報等ありましたらお願いします。
 新CPUボードを作りました。NS5000v3でも使えるはずです。
今のボード(中華製)はピンが傾いていたり、はんだ付けが汚いところがあるのですが、先日曲がったピンを抜いてつけ直し、あとでPCから認識されなくなり、1個駄目にしました。今後のことを考えてUSBは無いけれども互換性のあるCPUボードを作ることにしました。それと、ちょうど新元号が決まり、基板の中にREIWAと入れました。記念です。 |
新CPUボードを作りました。NS5000v3でも使えるはずです。
今のボード(中華製)はピンが傾いていたり、はんだ付けが汚いところがあるのですが、先日曲がったピンを抜いてつけ直し、あとでPCから認識されなくなり、1個駄目にしました。今後のことを考えてUSBは無いけれども互換性のあるCPUボードを作ることにしました。それと、ちょうど新元号が決まり、基板の中にREIWAと入れました。記念です。
今のボード(中華製)はピンが傾いていたり、はんだ付けが汚いところがあるのですが、先日曲がったピンを抜いてつけ直し、あとでPCから認識されなくなり、1個駄目にしました。今後のことを考えてUSBは無いけれども互換性のあるCPUボードを作ることにしました。それと、ちょうど新元号が決まり、基板の中にREIWAと入れました。記念です。
 やっと基板が到着しました。
NS5000v3 CPUボード(オートガイド端子、RS232Cコネクタ付き)、それにサイレント・マイクロステップドライバ、目立つブラック基板にしました。左の2個はNS402 bluetooth,wifi,TEMMA対応、少し改良します。 |
やっと基板が到着しました。
NS5000v3 CPUボード(オートガイド端子、RS232Cコネクタ付き)、それにサイレント・マイクロステップドライバ、目立つブラック基板にしました。左の2個はNS402 bluetooth,wifi,TEMMA対応、少し改良します。
NS5000v3 CPUボード(オートガイド端子、RS232Cコネクタ付き)、それにサイレント・マイクロステップドライバ、目立つブラック基板にしました。左の2個はNS402 bluetooth,wifi,TEMMA対応、少し改良します。
 NS-5000 v3基板の電源、グランドを確かめてから、直ぐに部品を乗せ、そっと電源を入れました。LEDが点滅しました。
ハンドボックス端子をつなぐとスピードが変化しました。
NS5000かんたん設定から接続、初期化データを読み出せました。 |
NS-5000 v3基板の電源、グランドを確かめてから、直ぐに部品を乗せ、そっと電源を入れました。LEDが点滅しました。
ハンドボックス端子をつなぐとスピードが変化しました。
NS5000かんたん設定から接続、初期化データを読み出せました。
ハンドボックス端子をつなぐとスピードが変化しました。
NS5000かんたん設定から接続、初期化データを読み出せました。
 サイレント・マイクロステップ基板が正常に動きました。3.3V電源でNS-5000 v3 を動かしています。
bluetooth,WiFi通信用としてNS-302/NS-402と同じESP32CPUボードを使いました。
NS-5000 v3は回路の互換性を維持しましたのでNS-302/NS-402のCPUをそのまま差し込んでも動作します。NS-402の場合はそのままbluetooth/WiFiからNS-5000v3を自動導入できます。 |
サイレント・マイクロステップ基板が正常に動きました。3.3V電源でNS-5000 v3 を動かしています。
bluetooth,WiFi通信用としてNS-302/NS-402と同じESP32CPUボードを使いました。
NS-5000 v3は回路の互換性を維持しましたのでNS-302/NS-402のCPUをそのまま差し込んでも動作します。NS-402の場合はそのままbluetooth/WiFiからNS-5000v3を自動導入できます。
bluetooth,WiFi通信用としてNS-302/NS-402と同じESP32CPUボードを使いました。
NS-5000 v3は回路の互換性を維持しましたのでNS-302/NS-402のCPUをそのまま差し込んでも動作します。NS-402の場合はそのままbluetooth/WiFiからNS-5000v3を自動導入できます。
 |  |
注文していた基板が到着しました。従来のユニポーラドライバ基板です。新たにバージョンアップ、グレードアップ用として2枚、基板発注しました。製造費用が安価なのでどんどん作ります。
 ESP32v1基板が到着しました。これを市販のESP32CPUボードと置き換える予定です。ただしUSBはありません。(電源の方はOK)USBは結構なのですがやっぱりシンプルなRS232Cが一番です。 |
ESP32v1基板が到着しました。これを市販のESP32CPUボードと置き換える予定です。ただしUSBはありません。(電源の方はOK)USBは結構なのですがやっぱりシンプルなRS232Cが一番です。
 ESP32v1、無事、動きました。NS5000v3のRS232Cを介して書き込みできました。最高115.2Kbps、それ以上はエラーしました。またESP32v1基板のUSB電源で、NS302,NS5000v3が動くことを確認できました。この基板は10x10cm 5枚で¥1200足らず、1枚に6枚ESP32v1を面付けしたのでなんと30枚出来てしまいました。 |
ESP32v1、無事、動きました。NS5000v3のRS232Cを介して書き込みできました。最高115.2Kbps、それ以上はエラーしました。またESP32v1基板のUSB電源で、NS302,NS5000v3が動くことを確認できました。この基板は10x10cm 5枚で¥1200足らず、1枚に6枚ESP32v1を面付けしたのでなんと30枚出来てしまいました。
 |  |
15日20:30に注文(アメリカ)したTMC2208が今日午前に到着しました。早いです。さっそく組み立て、NS5000パラメータに初期化しました。明日、NS5000v3+TMC2208v1基板が到着する予定。
 |  |
NS5000v3+TMC2208v1基板5枚、NS5000v3+ユニポーラ基板5枚届きました。11日発注今日到着です。製造はFusionPCB $19.8でした。
TMC2208の方を1台作ります。まだアナウンスしていませんが、NS-5000PKP243 1A(アンペア)サイレント・マイクロステップのご注文を頂いています。
TMC2208の方を1台作ります。まだアナウンスしていませんが、NS-5000PKP243 1A(アンペア)サイレント・マイクロステップのご注文を頂いています。
お客様からメールが届きました。
お客様は、ステラナビゲータでNS-5000を動かしている時に、おかしな挙動をすることがあり、それがステラナビの操作方法、設定が原因だと突き止められました。
ステラナビを使っているNS5000ユーザはたくさんおられますのでとても参考になると思います。
ぜひご覧ください。
http://nskikaku.sakura.ne.jp/NS2019/ns5000_mat.pdf
2019/04/19
「こんばんは。
栃木の〇〇です。ご無沙汰いたしております。
以下のことを最近経験しましたので。ご報告方々お知らせいたします。
最近のことです。
自宅の据え付けアトラクス赤道儀で、自動導入をしましたとき、いつもと違う動きが御座いました。
結論をいいますと、南半球駆動になっていたことで、動いていく方向があらぬ方向に行ってしまいました。
当初、なぜそうなるのか正直、見当もつきませんでした。
△△天体写真クラブ会長の〇〇氏に問い合わせしたところ、なんと〇〇氏も同じ経験したとのこと。
原因はステラナビゲーターの設定に問題在りということです。
同じことで、今まで、またはこれからも同じトラブルを抱えて悩んでいるひとがいるかも知れません。
この問題を未然に防ぐことを伝え、ユーザーの一人でも多くこの問題を解決する手立てに役たてられたらと思います。
その為に、NS-5000をステラナビゲーターで稼働させていることによる自動導入不調の原因と解決処置方法を
まとめました。西岡様が、この添付ファイルを御覧いただきまして、御精査いただければありがたいと思うところです。
また。参考という意味でなんらかのお役に立てられればとおもうところでございます。
やっと。春の訪れを感じる頃となりました。
ご繁栄をお祈りいたします。」
ありがとうございます。
お客様は、ステラナビゲータでNS-5000を動かしている時に、おかしな挙動をすることがあり、それがステラナビの操作方法、設定が原因だと突き止められました。
ステラナビを使っているNS5000ユーザはたくさんおられますのでとても参考になると思います。
ぜひご覧ください。
http://nskikaku.sakura.ne.jp/NS2019/ns5000_mat.pdf
2019/04/19
「こんばんは。
栃木の〇〇です。ご無沙汰いたしております。
以下のことを最近経験しましたので。ご報告方々お知らせいたします。
最近のことです。
自宅の据え付けアトラクス赤道儀で、自動導入をしましたとき、いつもと違う動きが御座いました。
結論をいいますと、南半球駆動になっていたことで、動いていく方向があらぬ方向に行ってしまいました。
当初、なぜそうなるのか正直、見当もつきませんでした。
△△天体写真クラブ会長の〇〇氏に問い合わせしたところ、なんと〇〇氏も同じ経験したとのこと。
原因はステラナビゲーターの設定に問題在りということです。
同じことで、今まで、またはこれからも同じトラブルを抱えて悩んでいるひとがいるかも知れません。
この問題を未然に防ぐことを伝え、ユーザーの一人でも多くこの問題を解決する手立てに役たてられたらと思います。
その為に、NS-5000をステラナビゲーターで稼働させていることによる自動導入不調の原因と解決処置方法を
まとめました。西岡様が、この添付ファイルを御覧いただきまして、御精査いただければありがたいと思うところです。
また。参考という意味でなんらかのお役に立てられればとおもうところでございます。
やっと。春の訪れを感じる頃となりました。
ご繁栄をお祈りいたします。」
ありがとうございます。
2019/04/19 20:28に更新
 NS5000v3+TMC2208v1基板の製作状況です。 |
NS5000v3+TMC2208v1基板の製作状況です。
 NS5000v3+TMC2208v1 2台作りました。
wifi、bluetooth、RS232C、stealthChop / spreadCycle切替、カレントダウン、調整ボリューム各機能、自動導入全部OKです。
それとショートピンで1/2,1/4,1/8,1/16マイクロステップ設定可能です。 |
NS5000v3+TMC2208v1 2台作りました。
wifi、bluetooth、RS232C、stealthChop / spreadCycle切替、カレントダウン、調整ボリューム各機能、自動導入全部OKです。
それとショートピンで1/2,1/4,1/8,1/16マイクロステップ設定可能です。
wifi、bluetooth、RS232C、stealthChop / spreadCycle切替、カレントダウン、調整ボリューム各機能、自動導入全部OKです。
それとショートピンで1/2,1/4,1/8,1/16マイクロステップ設定可能です。
 NS5000v3に放熱器を仮止めしてみました。2台製作します。1台は新規になり、もう一台はNS-5000GPをNS-5000v3 1A バイポーラ、bluetooth/wifiへグレードアップします。2,3日中に完了させます。 |
NS5000v3に放熱器を仮止めしてみました。2台製作します。1台は新規になり、もう一台はNS-5000GPをNS-5000v3 1A バイポーラ、bluetooth/wifiへグレードアップします。2,3日中に完了させます。
 NS-5000v3をケースに入れ組み立て中です。 |
NS-5000v3をケースに入れ組み立て中です。
 NS-5000v3組み立て中、その2 |
NS-5000v3組み立て中、その2
 |  |
NS-5000v3組み立て中、その3。ほぼ完成です。ドライバに熱伝導テープを貼り、アルミ板を挟んで、3本のネジで放熱器を取り付けました。
 NS-5000v3組み立て中、その4です。1台は完了したので、次にお預かりしているNS-5000GPを改造します。 |
NS-5000v3組み立て中、その4です。1台は完了したので、次にお預かりしているNS-5000GPを改造します。
 NS-5000v3組み立て中、その5です。改造は放熱器を残して完了です。つづきはあとで。 |
NS-5000v3組み立て中、その5です。改造は放熱器を残して完了です。つづきはあとで。
 NS-5000v3組み立て中、その6、新規組み立て、改造は完了しました。1日で2台は少々疲れました。 |
NS-5000v3組み立て中、その6、新規組み立て、改造は完了しました。1日で2台は少々疲れました。
西岡定彦さんが近況アップデートを投稿しました。
NS-5000v3 最高速について実験しました。注目すべき結果が得られました。NJPベルト仕様のパラメータにて速度を測りました。最高速は58Kppsです。
モータ オリエンタルモータ PKP223U09A-SG36 2019,4/23
電源16V ハーフコイル接続 1A 1/16マイクロステップ、 最高58Kpps でも脱調せず
電源24V ハーフコイル接続 1A 1/8マイクロステップ、 最高58Kpps でも脱調せず
電源16V フルコイル接続 0.5A 1/16マイクロステップ、 最高58Kpps でも脱調せず
電源16V フルコイル接続 0.5A 1/8マイクロステップ、 最高40Kpps で脱調した
すごい結果です。
ちなみに1/16サイレント・マイクロステップでは、同じモータで最高35Kppsが限界でした。
EQ5用バイポーラ・ハイブリッドモータ(ギアヘッド無し)も試しています。モータ EQ5用バイポーラ・ハイブリッドモータ(中華製) 2019,4/20
電源16V 0.3A 1/16マイクロステップ、 推定 20Kpps?
電源16V 0.3A 1/8マイクロステップ、 約10Kpps で脱調した
電源16V 0.3A 1/4マイクロステップ、 約5Kpps で脱調した
電源16V 0.3A 1/2マイクロステップ、 約2.5Kppsで脱調した
モータ オリエンタルモータ PKP223U09A-SG36 2019,4/23
電源16V ハーフコイル接続 1A 1/16マイクロステップ、 最高58Kpps でも脱調せず
電源24V ハーフコイル接続 1A 1/8マイクロステップ、 最高58Kpps でも脱調せず
電源16V フルコイル接続 0.5A 1/16マイクロステップ、 最高58Kpps でも脱調せず
電源16V フルコイル接続 0.5A 1/8マイクロステップ、 最高40Kpps で脱調した
すごい結果です。
ちなみに1/16サイレント・マイクロステップでは、同じモータで最高35Kppsが限界でした。
EQ5用バイポーラ・ハイブリッドモータ(ギアヘッド無し)も試しています。モータ EQ5用バイポーラ・ハイブリッドモータ(中華製) 2019,4/20
電源16V 0.3A 1/16マイクロステップ、 推定 20Kpps?
電源16V 0.3A 1/8マイクロステップ、 約10Kpps で脱調した
電源16V 0.3A 1/4マイクロステップ、 約5Kpps で脱調した
電源16V 0.3A 1/2マイクロステップ、 約2.5Kppsで脱調した
 いい型番が思いつかないのですが、今日、新型NS-5000v3PKP243A1-BIPOLAR 2台発送いたします。
その結果はあとでお知らせします。
またNJPベルト仕様を駆動することができます。
どうなるか期待しています。 |
いい型番が思いつかないのですが、今日、新型NS-5000v3PKP243A1-BIPOLAR 2台発送いたします。
その結果はあとでお知らせします。
またNJPベルト仕様を駆動することができます。
どうなるか期待しています。
その結果はあとでお知らせします。
またNJPベルト仕様を駆動することができます。
どうなるか期待しています。
 NS5000v3 3台作りました。2台は1A(アンペア)です。NS-5000v3PKP243A1-BIPOLARの結果を待っています。 |
NS5000v3 3台作りました。2台は1A(アンペア)です。NS-5000v3PKP243A1-BIPOLARの結果を待っています。
 古くからしまいこんでいたパーツや在庫?を整理、処分します。NS-12保守用のCPU(HD647180)ありましたがサポートはもう無理です。フィルムはオートガイダーSSTの基板製造用です。アドバンテストのライター、ROMはたぶん2716,2732クラス、大量のTTLがありました。これらはTVゲーム機業界にいた頃のものです。むかしギャラクシアンとかムーンクレスタ、パックマン~クレイジークライマー、ドンキーコングが人気あった頃に業界で仕事をしていました。
ゲームを作りましたが少し有名になったものがあります。 |
古くからしまいこんでいたパーツや在庫?を整理、処分します。NS-12保守用のCPU(HD647180)ありましたがサポートはもう無理です。フィルムはオートガイダーSSTの基板製造用です。アドバンテストのライター、ROMはたぶん2716,2732クラス、大量のTTLがありました。これらはTVゲーム機業界にいた頃のものです。むかしギャラクシアンとかムーンクレスタ、パックマン~クレイジークライマー、ドンキーコングが人気あった頃に業界で仕事をしていました。
ゲームを作りましたが少し有名になったものがあります。
ゲームを作りましたが少し有名になったものがあります。
 懐かしのPC-8001がでてきました。TVゲーム開発で大活躍しました。OSはCP/Mです。フルシステムを持っていますが、PC-8012,PC-8031?(フロッピーディスク)はもう少しかかりそうです。 |
懐かしのPC-8001がでてきました。TVゲーム開発で大活躍しました。OSはCP/Mです。フルシステムを持っていますが、PC-8012,PC-8031?(フロッピーディスク)はもう少しかかりそうです。
 古い基板がでてきました。CP/M用(低レベルのMS-DOS?みたいなもの)です。他の基板は最近作ったものです。CP/M基板は当時トランジスタ技術誌で領布していたもので2枚購入しました。1枚はそれでCP/Mマシンを自作しました。あとでお見せします。 |
古い基板がでてきました。CP/M用(低レベルのMS-DOS?みたいなもの)です。他の基板は最近作ったものです。CP/M基板は当時トランジスタ技術誌で領布していたもので2枚購入しました。1枚はそれでCP/Mマシンを自作しました。あとでお見せします。
 NJP PKP264モータ ベルト仕様(2アンペア)のテスト結果が工場からとどきました。従来のユニポーラとバイポーラで試しています。
バイポーラはNS-5000v3 サイレント・マイクロステップ1A(アンペア)フルコイル接続で動かしました。
2019/05/11 3:20
「PKP264NJPのユニットは4セット作成し此方でNJP赤道儀(メーカーでNV仕様に改修した仕様品)
に装着して最高速テストをしてみました。
電源電圧24Vで16分割で先日お送りした最高速X400倍の速度テーブルでは問題なく#50の最高速
で動きましたので。X700の速度テーブルを作成し8分割でテストしてみました。
DC24V:X700
DC12V:X500
でした。自動導入時と同じようにDEC、RA同時に動かして脱調しない速度を確認しています。
それからNS5000V3ユニットを使ってPKP264を(上記のユニポーラそのままです)フルバイポーラ接続
で動かしてみました。DC24Vでは無音無振動で脱調も無く動きますがDC12Vでは脱調しました。」
バイポーラはまだ準備、確認が不十分な状態です。しかしNJP PKP264モータを駆動できることを確認しました。
今NS-5000PKP264A2NJPベルト仕様は3台ご注文をいただいています。お客様にはお待ちいただいておりますが、結果次第でNS-5000v3をご案内するかもしれません。(費用はかかりません)ユニポーラ、バイポーラどちらでも対応準備してます。あと数日でNJPモータ3セット到着します。 |
NJP PKP264モータ ベルト仕様(2アンペア)のテスト結果が工場からとどきました。従来のユニポーラとバイポーラで試しています。
バイポーラはNS-5000v3 サイレント・マイクロステップ1A(アンペア)フルコイル接続で動かしました。
2019/05/11 3:20
「PKP264NJPのユニットは4セット作成し此方でNJP赤道儀(メーカーでNV仕様に改修した仕様品)
に装着して最高速テストをしてみました。
電源電圧24Vで16分割で先日お送りした最高速X400倍の速度テーブルでは問題なく#50の最高速
で動きましたので。X700の速度テーブルを作成し8分割でテストしてみました。
DC24V:X700
DC12V:X500
でした。自動導入時と同じようにDEC、RA同時に動かして脱調しない速度を確認しています。
それからNS5000V3ユニットを使ってPKP264を(上記のユニポーラそのままです)フルバイポーラ接続
で動かしてみました。DC24Vでは無音無振動で脱調も無く動きますがDC12Vでは脱調しました。」
バイポーラはまだ準備、確認が不十分な状態です。しかしNJP PKP264モータを駆動できることを確認しました。
今NS-5000PKP264A2NJPベルト仕様は3台ご注文をいただいています。お客様にはお待ちいただいておりますが、結果次第でNS-5000v3をご案内するかもしれません。(費用はかかりません)ユニポーラ、バイポーラどちらでも対応準備してます。あと数日でNJPモータ3セット到着します。
バイポーラはNS-5000v3 サイレント・マイクロステップ1A(アンペア)フルコイル接続で動かしました。
2019/05/11 3:20
「PKP264NJPのユニットは4セット作成し此方でNJP赤道儀(メーカーでNV仕様に改修した仕様品)
に装着して最高速テストをしてみました。
電源電圧24Vで16分割で先日お送りした最高速X400倍の速度テーブルでは問題なく#50の最高速
で動きましたので。X700の速度テーブルを作成し8分割でテストしてみました。
DC24V:X700
DC12V:X500
でした。自動導入時と同じようにDEC、RA同時に動かして脱調しない速度を確認しています。
それからNS5000V3ユニットを使ってPKP264を(上記のユニポーラそのままです)フルバイポーラ接続
で動かしてみました。DC24Vでは無音無振動で脱調も無く動きますがDC12Vでは脱調しました。」
バイポーラはまだ準備、確認が不十分な状態です。しかしNJP PKP264モータを駆動できることを確認しました。
今NS-5000PKP264A2NJPベルト仕様は3台ご注文をいただいています。お客様にはお待ちいただいておりますが、結果次第でNS-5000v3をご案内するかもしれません。(費用はかかりません)ユニポーラ、バイポーラどちらでも対応準備してます。あと数日でNJPモータ3セット到着します。
 |  |
NS-5000v3追加情報が入りました。ただし間違いがあり、正しい結果ではありません、参考になりますのでご紹介します。マイクロステップ数の設定が違っていました。
2019/05/11 17:41
「お世話になります。
NS-5000V3の最高速確認を再度してみました。
16分割でDC24VでX300、DC12VでX100速でした。
判った事ですがかんたん設定2Aで最高速を変更すると脱調する確率が高いです。
High Speedの方でやると脱調しません。
それから一度脱調すると電源を一度落とさないと最高速設定を下げても脱調しままです。
午後から〇〇市の〇〇様がEQ5proを持って来られてNS-5000V3と組み合わせてみました。
モーターは幸いにもPKPの6本リード線でしたのでハーフバイポーラで駆動しました。
モーターケーブルは変更せずNS-5000本体の基板とD-Subコネクタ間の接続リードを
DEC #3⇒#5、#4⇒#6 へ変更、RA #11⇒#13、#12⇒#14 に変更しました。
DC24Vで最高速はX360倍でした。
なお、ウォームホイール歯数は135です。
〇〇様がこれから遠征撮影に行かれるとの事でDC12Vでの確認はしていません。
ところでNS-5000V3のマイクロステップ分割数の設定ですが16分割は添付写真で合っているでしょうか?
参考までにEQ5proのNS-5000化の写真を添付します。モーターは何れもPKPの6本リードコネクタタイプで
今回のバイポーラ駆動化では特に手を入れていません。」
2019/05/11 17:41
「お世話になります。
NS-5000V3の最高速確認を再度してみました。
16分割でDC24VでX300、DC12VでX100速でした。
判った事ですがかんたん設定2Aで最高速を変更すると脱調する確率が高いです。
High Speedの方でやると脱調しません。
それから一度脱調すると電源を一度落とさないと最高速設定を下げても脱調しままです。
午後から〇〇市の〇〇様がEQ5proを持って来られてNS-5000V3と組み合わせてみました。
モーターは幸いにもPKPの6本リード線でしたのでハーフバイポーラで駆動しました。
モーターケーブルは変更せずNS-5000本体の基板とD-Subコネクタ間の接続リードを
DEC #3⇒#5、#4⇒#6 へ変更、RA #11⇒#13、#12⇒#14 に変更しました。
DC24Vで最高速はX360倍でした。
なお、ウォームホイール歯数は135です。
〇〇様がこれから遠征撮影に行かれるとの事でDC12Vでの確認はしていません。
ところでNS-5000V3のマイクロステップ分割数の設定ですが16分割は添付写真で合っているでしょうか?
参考までにEQ5proのNS-5000化の写真を添付します。モーターは何れもPKPの6本リードコネクタタイプで
今回のバイポーラ駆動化では特に手を入れていません。」
 NJP PKP264モータ ベルト仕様3セット到着しました。 |
NJP PKP264モータ ベルト仕様3セット到着しました。
西岡定彦さんが近況アップデートを投稿しました。
さらにNS-5000v3追加情報が入りました。
信頼できる情報です。
1 EQ5ProモータPK/PKP243A1?ハーフバイポーラ駆動
2 NJP PKP264A2ベルト仕様 フルバイポーラ駆動
どちらも動いています。
2019/05/12 0:27
「NS企画
西岡様
お世話になります。
設定のチェックありがとうございます。
現在、〇〇様がEQ5ProのNS-5000V3で長野県の八千穂高原に遠征撮影に
行っており様子伺いで電話で状況を聞いたところ恒星時が止まらないとの事でしたので
設定ミスの件をお伝えし修正してもらいました。
分割数の設定ピンはMS1,MS2ともオープンでしたので8分割の状態で速度テーブルを
16分割で作成していましたので恒星時は2倍のスピードで動き導入速度もX360でなく
実際にはX720で動いていたようです。
各ドライバーの電流設定の誤設定のピンをMS1、MS2に移設し16分割に設定してもらった
ところ恒星時が正常になったとの事で一安心です。
NJPのフルバイポーラ結線でマイクロステップ分割数を電流設定を修正後に再確認したら
16分割で0.9A設定で24VでX400倍、12VでX200で動いています。
サポートありがとうございました。」
信頼できる情報です。
1 EQ5ProモータPK/PKP243A1?ハーフバイポーラ駆動
2 NJP PKP264A2ベルト仕様 フルバイポーラ駆動
どちらも動いています。
2019/05/12 0:27
「NS企画
西岡様
お世話になります。
設定のチェックありがとうございます。
現在、〇〇様がEQ5ProのNS-5000V3で長野県の八千穂高原に遠征撮影に
行っており様子伺いで電話で状況を聞いたところ恒星時が止まらないとの事でしたので
設定ミスの件をお伝えし修正してもらいました。
分割数の設定ピンはMS1,MS2ともオープンでしたので8分割の状態で速度テーブルを
16分割で作成していましたので恒星時は2倍のスピードで動き導入速度もX360でなく
実際にはX720で動いていたようです。
各ドライバーの電流設定の誤設定のピンをMS1、MS2に移設し16分割に設定してもらった
ところ恒星時が正常になったとの事で一安心です。
NJPのフルバイポーラ結線でマイクロステップ分割数を電流設定を修正後に再確認したら
16分割で0.9A設定で24VでX400倍、12VでX200で動いています。
サポートありがとうございました。」
西岡定彦さんが近況アップデートを投稿しました。
AZ-EQ5 PRO 赤道儀のモータは
RA: PKP243U09A-SG18
DEC: PKP223U09A-SG18 です。
RA: PKP243U09A-SG18
DEC: PKP223U09A-SG18 です。
西岡定彦さんが近況アップデートを投稿しました。
NS-5000v3追加情報として、EQ5Pro用NS-5000V3で長野県の八千穂高原に遠征撮影されたお客様からメールをいただきました。お客様は天文雑誌に何度も入選されミカゲ310-400 ,NJP ,GPD ・・を運用されてます。
EQ5Proは両軸最高速x360に初期化されています。
2019/05/13 13:02
「西岡さま
昨日新型NS5000をAZ EQ5GOTIOに搭載してテストしました。
モーターはオリエンタル243(赤経)223(赤緯)です。いずれも6芯のユニポーラモーターです。
D-SUBの結線を4箇所修正してコードは現行のまま使いました。
結論は導入精度、ガイド精度も良好です。
ドライバICの発熱も問題ないようです。
12V、24V両方で最高速で導入できました。
無音無振動で大変良好です。
〇〇さんもNJPのテスト中ですが264は12Vだと最高速が半分くらいになると言っていました。」
EQ5Proは両軸最高速x360に初期化されています。
2019/05/13 13:02
「西岡さま
昨日新型NS5000をAZ EQ5GOTIOに搭載してテストしました。
モーターはオリエンタル243(赤経)223(赤緯)です。いずれも6芯のユニポーラモーターです。
D-SUBの結線を4箇所修正してコードは現行のまま使いました。
結論は導入精度、ガイド精度も良好です。
ドライバICの発熱も問題ないようです。
12V、24V両方で最高速で導入できました。
無音無振動で大変良好です。
〇〇さんもNJPのテスト中ですが264は12Vだと最高速が半分くらいになると言っていました。」
 NJP PKP264A2ベルトモータで最高速の実験をしました。
追加情報(5月12日)とだいたい同じ結果になりました。
PKP264U02A 電源16--24V
1/8マイクロステップ 約20Kpps
1/16マイクロステップ 約40Kpps
NJPベルト仕様3台受注しています。
お客様に新型NS-5000v3をご案内したところ2台ご了解をいただきました。残り1台はアストロショップAu様からのご注文です、ご返事はもう少しかかりそうです。
明日から製作を始めます。 |
NJP PKP264A2ベルトモータで最高速の実験をしました。
追加情報(5月12日)とだいたい同じ結果になりました。
PKP264U02A 電源16--24V
1/8マイクロステップ 約20Kpps
1/16マイクロステップ 約40Kpps
NJPベルト仕様3台受注しています。
お客様に新型NS-5000v3をご案内したところ2台ご了解をいただきました。残り1台はアストロショップAu様からのご注文です、ご返事はもう少しかかりそうです。
明日から製作を始めます。
追加情報(5月12日)とだいたい同じ結果になりました。
PKP264U02A 電源16--24V
1/8マイクロステップ 約20Kpps
1/16マイクロステップ 約40Kpps
NJPベルト仕様3台受注しています。
お客様に新型NS-5000v3をご案内したところ2台ご了解をいただきました。残り1台はアストロショップAu様からのご注文です、ご返事はもう少しかかりそうです。
明日から製作を始めます。
 |  |  |
ペンタックスMS-55i用NS-5000のドライバをTMC2100からTMC2208へグレードアップしました。最高速が伸びると思います。サイレント・マイクロステップはそのままです。
型番はNS-5000MS55iーBIPOLAR
また先日ペンタックスMS-55zのご注文をいただきました。これは両軸5相モータを使っており、専用ドライバを注文して、さっき到着しました。CPUはNS-5000v3を使う予定です。
それからこないだ3台発送したNS-5000v3PKP264NJP-BIPLOLARですが、直前不具合が判明して、その対策をして納品しました。一人のお客様から良好に動いているとご連絡をいただいています。あとでそれについてお知らせする予定です。
型番はNS-5000MS55iーBIPOLAR
また先日ペンタックスMS-55zのご注文をいただきました。これは両軸5相モータを使っており、専用ドライバを注文して、さっき到着しました。CPUはNS-5000v3を使う予定です。
それからこないだ3台発送したNS-5000v3PKP264NJP-BIPLOLARですが、直前不具合が判明して、その対策をして納品しました。一人のお客様から良好に動いているとご連絡をいただいています。あとでそれについてお知らせする予定です。
 EM100用、ペンタックスMS-5用NS-5000を作りました。
EM100モータは工場で製作、取付け中です。
MS-5はごく最近ご注文をいただいたもので中古のNS-5000をグレードアップして対応します。 |
EM100用、ペンタックスMS-5用NS-5000を作りました。
EM100モータは工場で製作、取付け中です。
MS-5はごく最近ご注文をいただいたもので中古のNS-5000をグレードアップして対応します。
EM100モータは工場で製作、取付け中です。
MS-5はごく最近ご注文をいただいたもので中古のNS-5000をグレードアップして対応します。
 |  |
EM100用NS-5000PKP243EM100は準備できました。
それからお問い合わせのNJP赤道儀(兵庫県)が到着しました。これはオートガイド中以下の症状が現れるようになったそうで、ギア式モータ、赤道儀を検査、対策を行います。
「オートガイド撮影中、赤経側のみ動きが安定しません。(赤緯側は安定しています。)
ガイドグラフを見ていると赤経側のみグラフのフレが突然すごく大きくなり、ガイドミス発生して撮影に失敗します。」
症状から赤経側のモータ、ギア、金具に問題がある可能性がありますので、その対策として3件ご案内しました。
1 現状のギア式モータをベルト式に改造します。
2 ギア式モータをベルト式に改造 とNJP両ウォームギア軸ベアリング化いたします。ウォームギア軸受けをフルベアリング化すると、フリクション低減につながりベルトドライブ化した場合ガイド精度が向上します。
3 現状のNS5000NJP+ギア式モータ一式を下取りして、新品のベルト式モータ+NS-5000v3一式(最新型)をご案内いたします。 ベルト式モータは新品になります。またNS-5000は最近開発したNS-5000v3になります。
お客様は現在のところ3をご希望されていますが、先ずモータ、赤道儀を調べます。
赤道儀はNS-5000PKP243EM100と一緒に明日工場へ送る予定です。
それからお問い合わせのNJP赤道儀(兵庫県)が到着しました。これはオートガイド中以下の症状が現れるようになったそうで、ギア式モータ、赤道儀を検査、対策を行います。
「オートガイド撮影中、赤経側のみ動きが安定しません。(赤緯側は安定しています。)
ガイドグラフを見ていると赤経側のみグラフのフレが突然すごく大きくなり、ガイドミス発生して撮影に失敗します。」
症状から赤経側のモータ、ギア、金具に問題がある可能性がありますので、その対策として3件ご案内しました。
1 現状のギア式モータをベルト式に改造します。
2 ギア式モータをベルト式に改造 とNJP両ウォームギア軸ベアリング化いたします。ウォームギア軸受けをフルベアリング化すると、フリクション低減につながりベルトドライブ化した場合ガイド精度が向上します。
3 現状のNS5000NJP+ギア式モータ一式を下取りして、新品のベルト式モータ+NS-5000v3一式(最新型)をご案内いたします。 ベルト式モータは新品になります。またNS-5000は最近開発したNS-5000v3になります。
お客様は現在のところ3をご希望されていますが、先ずモータ、赤道儀を調べます。
赤道儀はNS-5000PKP243EM100と一緒に明日工場へ送る予定です。
 仕事が遅れ気味です、ペンタックス用NS-5000MS55z(5相モータ)は明日配線予定です。 |
仕事が遅れ気味です、ペンタックス用NS-5000MS55z(5相モータ)は明日配線予定です。
 NS-5000MS55z(5相モータ)製作中です。5相版は配線が異なるので神経を使います。 |
NS-5000MS55z(5相モータ)製作中です。5相版は配線が異なるので神経を使います。
 NS-5000MS55z こんな感じになりました。 |
NS-5000MS55z こんな感じになりました。
 ペンタックスMS-5(2相),MS-55z(5相)用です。あと初期化、オプションで12か13日に発送する予定です。MS-5のモータは日本パルスPF55-48です。 |
ペンタックスMS-5(2相),MS-55z(5相)用です。あと初期化、オプションで12か13日に発送する予定です。MS-5のモータは日本パルスPF55-48です。
 |  |
NS-5000のケースが新しくなります。これまでのは昨年8月に廃止され、あと残りわずかです。一部補修用に残して、新しいケースに変更します。NS-5000GP(長野県上田市)を作りました。今夜これを発送してから、釧路のお祭り「第35回くしろ霧フェスティバル」へ行ってきます。
 |  |
昨日は、NS-5000GP(東京)とNS-5000v3ATLUX-BIPOLAR(佐賀県)を発送しました。
 NS-5000v3ATLUX-BIPOLAR(佐賀県)のお客様からメールを頂きました。旧アトラクス赤道儀は、サイレント・マイクロステップ駆動ができることを確認しました。
2019/08/20 23:11
「西岡定彦さま
今日やっとNS―5000をアトラクスに繋げてテスト出来ました。
良好に動いていて今まで気になっていた駆動音が全くしなくなって、動いているのが疑うほど静かになりました。
もう少し早く動くように設定を変えるのは帰ってからにします。」 |
NS-5000v3ATLUX-BIPOLAR(佐賀県)のお客様からメールを頂きました。旧アトラクス赤道儀は、サイレント・マイクロステップ駆動ができることを確認しました。
2019/08/20 23:11
「西岡定彦さま
今日やっとNS―5000をアトラクスに繋げてテスト出来ました。
良好に動いていて今まで気になっていた駆動音が全くしなくなって、動いているのが疑うほど静かになりました。
もう少し早く動くように設定を変えるのは帰ってからにします。」
2019/08/20 23:11
「西岡定彦さま
今日やっとNS―5000をアトラクスに繋げてテスト出来ました。
良好に動いていて今まで気になっていた駆動音が全くしなくなって、動いているのが疑うほど静かになりました。
もう少し早く動くように設定を変えるのは帰ってからにします。」
 NS-5000MS55z ペンタックスMS-55z(5相モータ版)のお客様からメールが届きました。300倍で良好に動いているそうです。たぶん500倍にとどくと思われます。
5相の場合は、サイレント・マイクロステップと同様に無音無振動で恒星時追尾、オートガイドができます。
2019/09/05
「NS企画様
お世話になります。
早々に改修していただたにもかかわらず報告遅くなり申し訳ありません。
盆頃の台風10号に続き秋雨前線により晴れる日がありませんでした。
香川はいつもならこの時期晴天が数十日続き、毎年渇水が心配されるほどです。
昨夜雲が多いながらも星が見えたので、NS5000駆動させました。
追尾に問題もなく、自動導入も80倍でもわずかなづれはありますが
正確に導いてくれました。
300倍の導入速度もこれで十分で、これ以上だともしもの時に慌てそうです。
ただ西空のアンターレスから子午線を挟んでM22を導入しようとしたら
西ー天頂ー北天周りに動いて行ったのはびっくりしました。
望遠鏡がアストロフィジックス180mmF9の大柄なやつなので
機械まかせの運転には気を使います。
不明なことがあればご指導お願いします。」 |
NS-5000MS55z ペンタックスMS-55z(5相モータ版)のお客様からメールが届きました。300倍で良好に動いているそうです。たぶん500倍にとどくと思われます。
5相の場合は、サイレント・マイクロステップと同様に無音無振動で恒星時追尾、オートガイドができます。
2019/09/05
「NS企画様
お世話になります。
早々に改修していただたにもかかわらず報告遅くなり申し訳ありません。
盆頃の台風10号に続き秋雨前線により晴れる日がありませんでした。
香川はいつもならこの時期晴天が数十日続き、毎年渇水が心配されるほどです。
昨夜雲が多いながらも星が見えたので、NS5000駆動させました。
追尾に問題もなく、自動導入も80倍でもわずかなづれはありますが
正確に導いてくれました。
300倍の導入速度もこれで十分で、これ以上だともしもの時に慌てそうです。
ただ西空のアンターレスから子午線を挟んでM22を導入しようとしたら
西ー天頂ー北天周りに動いて行ったのはびっくりしました。
望遠鏡がアストロフィジックス180mmF9の大柄なやつなので
機械まかせの運転には気を使います。
不明なことがあればご指導お願いします。」
5相の場合は、サイレント・マイクロステップと同様に無音無振動で恒星時追尾、オートガイドができます。
2019/09/05
「NS企画様
お世話になります。
早々に改修していただたにもかかわらず報告遅くなり申し訳ありません。
盆頃の台風10号に続き秋雨前線により晴れる日がありませんでした。
香川はいつもならこの時期晴天が数十日続き、毎年渇水が心配されるほどです。
昨夜雲が多いながらも星が見えたので、NS5000駆動させました。
追尾に問題もなく、自動導入も80倍でもわずかなづれはありますが
正確に導いてくれました。
300倍の導入速度もこれで十分で、これ以上だともしもの時に慌てそうです。
ただ西空のアンターレスから子午線を挟んでM22を導入しようとしたら
西ー天頂ー北天周りに動いて行ったのはびっくりしました。
望遠鏡がアストロフィジックス180mmF9の大柄なやつなので
機械まかせの運転には気を使います。
不明なことがあればご指導お願いします。」
 注文していたパーツが到着しました。
今月は、大型(まだ機種不明です?)、Skymax V、NS-5000EM200(純正モータ版)、それにNS-501GP 2セット(スターベース様)を製作する予定です。 |
注文していたパーツが到着しました。
今月は、大型(まだ機種不明です?)、Skymax V、NS-5000EM200(純正モータ版)、それにNS-501GP 2セット(スターベース様)を製作する予定です。
今月は、大型(まだ機種不明です?)、Skymax V、NS-5000EM200(純正モータ版)、それにNS-501GP 2セット(スターベース様)を製作する予定です。
 今日はサイレント・マイクロステップ駆動用ドライバTMC2208を初期化して、NS-501GP,NS-5000EM200基板・・を作りました。 |
今日はサイレント・マイクロステップ駆動用ドライバTMC2208を初期化して、NS-501GP,NS-5000EM200基板・・を作りました。
 NS-501GP,NS-5000EM200・・製作の続きです。基板はだいたい準備できたと思います。 |
NS-501GP,NS-5000EM200・・製作の続きです。基板はだいたい準備できたと思います。
 ケース加工は、昨夜、もう少しで完成まできました。 |
ケース加工は、昨夜、もう少しで完成まできました。
次に製作予定として、Skymax V、大型は永田光機 VT-3をNS-5000化する事になりそうです。
VT-3は、赤経420歯、赤緯360歯だそうで情報が不足しています。資料はあるらしいですが、肝心のモータ、ギア関係の情報が全然ありません。どなたか何でも結構です関連情報がありましたら教えて下さい。お願いします。
参考写真https://aucview.aucfan.com/yahoo/n239091283/
VT-3は、赤経420歯、赤緯360歯だそうで情報が不足しています。資料はあるらしいですが、肝心のモータ、ギア関係の情報が全然ありません。どなたか何でも結構です関連情報がありましたら教えて下さい。お願いします。
参考写真https://aucview.aucfan.com/yahoo/n239091283/
2019/09/18 14:20に更新
 NS-5000v3GP 基板 ユニポーラドライバ版を作っています。(下)NS-5000v3は2種類ありユニポーラは今回が初めてです。
NS-5000v3は、bluetooth / WiFi に対応します。
バイポーラ,ユニポーラほぼ似てますがドライバが違います。(右上バイポーラ)お客様はNS-5000GP TMC2100サイレント・マイクロステップをご利用いただいています、ご希望により(MT-1モータは現在のところバイポーラではスピードが出ません、せいぜいx60ぐらい)ユニポーラに改造します。ユニポーラでは約x140期待できそうです。上左はNS-302 MS-5で使用中のアストロスケールが不調でのご注文です。(栃木県) |
NS-5000v3GP 基板 ユニポーラドライバ版を作っています。(下)NS-5000v3は2種類ありユニポーラは今回が初めてです。
NS-5000v3は、bluetooth / WiFi に対応します。
バイポーラ,ユニポーラほぼ似てますがドライバが違います。(右上バイポーラ)お客様はNS-5000GP TMC2100サイレント・マイクロステップをご利用いただいています、ご希望により(MT-1モータは現在のところバイポーラではスピードが出ません、せいぜいx60ぐらい)ユニポーラに改造します。ユニポーラでは約x140期待できそうです。上左はNS-302 MS-5で使用中のアストロスケールが不調でのご注文です。(栃木県)
NS-5000v3は、bluetooth / WiFi に対応します。
バイポーラ,ユニポーラほぼ似てますがドライバが違います。(右上バイポーラ)お客様はNS-5000GP TMC2100サイレント・マイクロステップをご利用いただいています、ご希望により(MT-1モータは現在のところバイポーラではスピードが出ません、せいぜいx60ぐらい)ユニポーラに改造します。ユニポーラでは約x140期待できそうです。上左はNS-302 MS-5で使用中のアストロスケールが不調でのご注文です。(栃木県)
 |  |
NS-302 Digital Setting Circles ケース加工用の型紙を作っています。それとNS5000用です。
 NS-302 Digital Setting Circles型紙完成、さっそくケース加工しました。これはNS-402にも対応します。NS402はLX200、PC2000、TEMMA・・をbluetooth ,WiFi対応にします。 |
NS-302 Digital Setting Circles型紙完成、さっそくケース加工しました。これはNS-402にも対応します。NS402はLX200、PC2000、TEMMA・・をbluetooth ,WiFi対応にします。
 型紙でケース3個を加工しました。まあまあの出来です。 |
型紙でケース3個を加工しました。まあまあの出来です。
 NS-302BT Digital Setting Circles (bluetooth版)2台完成しました。ステラナビ接続OKです。明日発送予定です。 |
NS-302BT Digital Setting Circles (bluetooth版)2台完成しました。ステラナビ接続OKです。明日発送予定です。
 |  |  |
今夜はNS-5000GP TMC2100をNS-5000v3GPユニポーラ駆動版に改造しました。テストは明日やります。
 |  |
工場へ依頼していたNJPオーバーホール、モータユニット改良・・について、ようやく連絡が入りました。
お客様(兵庫県)にはNS-5000ギア方式を長年ご利用いただいていましたが、最近赤経方向でオートガイドが不調になり、
修理を依頼されました。調べたところカバー破損、衝突?の影響によるギアの損傷、中間ギア軸のゆるみを確認しました。
また赤道儀の動きも重く、お客様と相談の上、モータユニットの改良とオーバーホールをすることになりました。
NJPオーバーホール作業は
①分解・洗浄・再グリースアップ。
②赤経・赤緯ウォームホイールのラッピング研磨。
赤緯軸に若干の偏摩耗が認められましたがラッピングで解消しています。
③モータードライブユニットをギア仕様からベルトドライブ仕様に交換。
NJPギア仕様からベルト仕様へ改造する、改造キットを販売する予定です。
同時に、両軸ベアリング化しました。ベルトドライブでは軸に強いテンションがかかりますのでこれは必須となります。
また、NS-5000NJPは、最新の NS-5000v3 バイポーラ駆動 サイレント・マイクロステップに交換します。
お客様(兵庫県)にはNS-5000ギア方式を長年ご利用いただいていましたが、最近赤経方向でオートガイドが不調になり、
修理を依頼されました。調べたところカバー破損、衝突?の影響によるギアの損傷、中間ギア軸のゆるみを確認しました。
また赤道儀の動きも重く、お客様と相談の上、モータユニットの改良とオーバーホールをすることになりました。
NJPオーバーホール作業は
①分解・洗浄・再グリースアップ。
②赤経・赤緯ウォームホイールのラッピング研磨。
赤緯軸に若干の偏摩耗が認められましたがラッピングで解消しています。
③モータードライブユニットをギア仕様からベルトドライブ仕様に交換。
NJPギア仕様からベルト仕様へ改造する、改造キットを販売する予定です。
同時に、両軸ベアリング化しました。ベルトドライブでは軸に強いテンションがかかりますのでこれは必須となります。
また、NS-5000NJPは、最新の NS-5000v3 バイポーラ駆動 サイレント・マイクロステップに交換します。
 |  |
NS-5000v3PKP264NJP_BIPOLAR(兵庫県)を発送しました。
恒星時は、赤経89pps 赤緯96pps にしました。
恒星時は、赤経89pps 赤緯96pps にしました。
 NS-5000v3製作中。左がたぶんNJP用になり、もう一つはNS-5000v3EM200HBハイブリッドモータ用です。これは赤道儀オーバーホールも行います、アストロショップAU様(札幌市)に依頼しています。それからDigi-Keyに注文したTMC2208,ESP32が到着です。 |
NS-5000v3製作中。左がたぶんNJP用になり、もう一つはNS-5000v3EM200HBハイブリッドモータ用です。これは赤道儀オーバーホールも行います、アストロショップAU様(札幌市)に依頼しています。それからDigi-Keyに注文したTMC2208,ESP32が到着です。
 入荷したTMC2208 6個、NS5000用にプログラミングしました。全部OKです。 |
入荷したTMC2208 6個、NS5000用にプログラミングしました。全部OKです。
 |  |
旧アトラクス赤道儀とNS-5000ATLUXが到着しています。
赤道儀は重いのと落としては大変なので玄関先で作業します。
今回は赤経側が動かないということで、テレスコープセンターアイベル様(三重県津市)から修理のご依頼をいただきました。
モータをつなぎ動かしたところ、赤経、赤緯ともに普通に動きました。明日は、赤道儀、ケーブル、その他全部調べます。
赤道儀は重いのと落としては大変なので玄関先で作業します。
今回は赤経側が動かないということで、テレスコープセンターアイベル様(三重県津市)から修理のご依頼をいただきました。
モータをつなぎ動かしたところ、赤経、赤緯ともに普通に動きました。明日は、赤道儀、ケーブル、その他全部調べます。
 NS-5000v3EM200HBハイブリッドモータ用ですが、パネル+モータを製作し、正常に動くことを確認しました。
恒星時 120ppsです。
バイポーラでと考えてましたが、モータの都合でユニポーラにします。(お客様はユニポーラでご案内しています)
これをアストロショップAU様(札幌市)に送ります。 |
NS-5000v3EM200HBハイブリッドモータ用ですが、パネル+モータを製作し、正常に動くことを確認しました。
恒星時 120ppsです。
バイポーラでと考えてましたが、モータの都合でユニポーラにします。(お客様はユニポーラでご案内しています)
これをアストロショップAU様(札幌市)に送ります。
恒星時 120ppsです。
バイポーラでと考えてましたが、モータの都合でユニポーラにします。(お客様はユニポーラでご案内しています)
これをアストロショップAU様(札幌市)に送ります。
 |  |
工場(群馬県)で、NS-5000PKP264NJP_BIPOLAR(バイポーラ、サイレント・マイクロステップ)+ベルトドライブによる撮影が行われました。
NJP赤道儀はオーバーホールを行い、NJPモータはギア仕様からベルト仕様、そしてNS-5000は新型NS-5000v3NJPバイポーラ仕様と交換してお客様(兵庫県)へ送りました。
発送前にテスト撮影をしました。
サイレント・マイクロステップによる無音無振動の状態で、恒星時追尾、オートガイドを行っています。
以下は工場からのメールです、参考にしてください。
2019/11/29
「赤道儀のオーバーホール後の確認も兼ねてやっと晴れましたのでテスト撮影をしました。
確認項目ですが
①恒星時運転
②自動導入精度
③ガイド撮影
の3点です。
①の恒星時は10分経過しても位置がズレていないかで判断しています。
極軸調整は電子極望のPoleMasterで行っています。
②はステラナビゲータで シリウス(同期) ⇒ べテルギュース ⇒ アルデバラン ⇒ シリウス
と順次自動導入し視野中央に入るのと同期したシリウスに戻ってくるかです。導入途中で脱調
等の不具合が有ればシリウスに戻ってきた時に位置がズレますので確認出来ます。
問題なく機能しました。
③テスト撮影は下記のセットアップで行いました
撮影鏡筒:Kenko ED Apo150 (15cmED、f=1200mm)
カメラ:FLI ML-16803 (-35℃)
フィルター:Hβ (クロマテクノロジー、半波値=3nm)
ガイド鏡: 45EDⅡ (Borg 45mm、f=325mm)
ガイドカメラ:ZWO ASI290MM Mini
ガイドソフト:MaxIm DL6
ガイド出力:MEADE LX-200コマンド制御で実施(ガイドリレーは使っていません)
NS-5000電源:同梱SONY製19.5V ACアダプターを使用。
NS-5000の最高速設定は両軸とも#35のX250です。
テスト撮影に使用した鏡筒+カメラの総重量は29kgあります(鏡筒がkenkoの昔の試作品で鉄鏡筒
のため凄く重たいです) NJP赤道儀の搭載重量のカタログ値は約30kgですのでフル搭載の状態
でテストしています。
撮影対象は前から撮って見たかったM42周辺のHβ(Hαではないです)のナロー画像で露出時間は
20分x2枚 計40分です。画像処理は簡易的にしていますがオートガイドが上手く機能していて流れて
いません。また、ガイドエラーも±1ピクセル以内に収まっていますので良好です。
なお鏡筒のセッティングですが赤経はウェイト側(東側)が若干重め、赤緯は鏡筒筒先が重めに調整
しています。」
NJP赤道儀はオーバーホールを行い、NJPモータはギア仕様からベルト仕様、そしてNS-5000は新型NS-5000v3NJPバイポーラ仕様と交換してお客様(兵庫県)へ送りました。
発送前にテスト撮影をしました。
サイレント・マイクロステップによる無音無振動の状態で、恒星時追尾、オートガイドを行っています。
以下は工場からのメールです、参考にしてください。
2019/11/29
「赤道儀のオーバーホール後の確認も兼ねてやっと晴れましたのでテスト撮影をしました。
確認項目ですが
①恒星時運転
②自動導入精度
③ガイド撮影
の3点です。
①の恒星時は10分経過しても位置がズレていないかで判断しています。
極軸調整は電子極望のPoleMasterで行っています。
②はステラナビゲータで シリウス(同期) ⇒ べテルギュース ⇒ アルデバラン ⇒ シリウス
と順次自動導入し視野中央に入るのと同期したシリウスに戻ってくるかです。導入途中で脱調
等の不具合が有ればシリウスに戻ってきた時に位置がズレますので確認出来ます。
問題なく機能しました。
③テスト撮影は下記のセットアップで行いました
撮影鏡筒:Kenko ED Apo150 (15cmED、f=1200mm)
カメラ:FLI ML-16803 (-35℃)
フィルター:Hβ (クロマテクノロジー、半波値=3nm)
ガイド鏡: 45EDⅡ (Borg 45mm、f=325mm)
ガイドカメラ:ZWO ASI290MM Mini
ガイドソフト:MaxIm DL6
ガイド出力:MEADE LX-200コマンド制御で実施(ガイドリレーは使っていません)
NS-5000電源:同梱SONY製19.5V ACアダプターを使用。
NS-5000の最高速設定は両軸とも#35のX250です。
テスト撮影に使用した鏡筒+カメラの総重量は29kgあります(鏡筒がkenkoの昔の試作品で鉄鏡筒
のため凄く重たいです) NJP赤道儀の搭載重量のカタログ値は約30kgですのでフル搭載の状態
でテストしています。
撮影対象は前から撮って見たかったM42周辺のHβ(Hαではないです)のナロー画像で露出時間は
20分x2枚 計40分です。画像処理は簡易的にしていますがオートガイドが上手く機能していて流れて
いません。また、ガイドエラーも±1ピクセル以内に収まっていますので良好です。
なお鏡筒のセッティングですが赤経はウェイト側(東側)が若干重め、赤緯は鏡筒筒先が重めに調整
しています。」
 |  |
おそらく今年最後?の部品が到着しました。同時に32bitCPUボード購入しました。これでNS-5000上位互換システムを作れないかひそかに検討しています。
それからNS-5000MS5のご依頼をいただいていますが、あと4,5日で完成させる予定です。
今年はペンタックス赤道儀MS-55z ,MS55iそしてMS-5 2台をNS-5000化しました。
それからNS-5000MS5のご依頼をいただいていますが、あと4,5日で完成させる予定です。
今年はペンタックス赤道儀MS-55z ,MS55iそしてMS-5 2台をNS-5000化しました。
 NJPベルトドライブ2個到着しました。
左はお客様から下取りしたギア式モータをベルトに改造したもの、右は新品のベルトドライブです。
下取りベルトドライブの方はカバーに収まるようベルトギア比を調整しています。赤経1 、赤緯1.6です。
これをNS-5000v3PKP264_BIPOLARで動かす予定です。 |
NJPベルトドライブ2個到着しました。
左はお客様から下取りしたギア式モータをベルトに改造したもの、右は新品のベルトドライブです。
下取りベルトドライブの方はカバーに収まるようベルトギア比を調整しています。赤経1 、赤緯1.6です。
これをNS-5000v3PKP264_BIPOLARで動かす予定です。
左はお客様から下取りしたギア式モータをベルトに改造したもの、右は新品のベルトドライブです。
下取りベルトドライブの方はカバーに収まるようベルトギア比を調整しています。赤経1 、赤緯1.6です。
これをNS-5000v3PKP264_BIPOLARで動かす予定です。
 大変お待たせしました、NS-5000v3MS5がやっと出来上がりました。日曜ですが、ゆうパックで送ります。 |
大変お待たせしました、NS-5000v3MS5がやっと出来上がりました。日曜ですが、ゆうパックで送ります。
 今年もよろしくお願いいたします。
正月は購入済のwin10マシンを準備してました。win10 i3 8GB 64bit HDD500GB中古でSSDへやっと換装できました。長年使ったwin7は、少し慎重になりますが、当面そのまま使い続ける予定です。
写真右はNJPベルトモータ、NS-5000PKP264NJP_BIPOLAR本体は完成しています、あとはテストです。(札幌のアストロショップAU様) |
今年もよろしくお願いいたします。
正月は購入済のwin10マシンを準備してました。win10 i3 8GB 64bit HDD500GB中古でSSDへやっと換装できました。長年使ったwin7は、少し慎重になりますが、当面そのまま使い続ける予定です。
写真右はNJPベルトモータ、NS-5000PKP264NJP_BIPOLAR本体は完成しています、あとはテストです。(札幌のアストロショップAU様)
正月は購入済のwin10マシンを準備してました。win10 i3 8GB 64bit HDD500GB中古でSSDへやっと換装できました。長年使ったwin7は、少し慎重になりますが、当面そのまま使い続ける予定です。
写真右はNJPベルトモータ、NS-5000PKP264NJP_BIPOLAR本体は完成しています、あとはテストです。(札幌のアストロショップAU様)
 久しぶりになります。今日はNS-5000v3GP(東京)を発送しました。あとNS-501v3GP 2台(スターベース東京様)とSKYMAX IVが一式あります。どちらも月末までが目標です。SKYMAX はNS-5000v3_BIPOLARで対応します、本体はほぼ完成済。
NS-501ですが今後v3で対応する予定です。 |
久しぶりになります。今日はNS-5000v3GP(東京)を発送しました。あとNS-501v3GP 2台(スターベース東京様)とSKYMAX IVが一式あります。どちらも月末までが目標です。SKYMAX はNS-5000v3_BIPOLARで対応します、本体はほぼ完成済。
NS-501ですが今後v3で対応する予定です。
NS-501ですが今後v3で対応する予定です。
 |  |  |
SKYMAX (IVではなくVでした)は今日赤道儀本体の改造を済ませました。
はじめの予定は、赤緯体に接続コネクタを取付け、本体側は不要なパーツ、ドライバ等をバッサリ、切断か取り外しを考えていましたが、狭い空間にケーブル、コネクタなどぎっしり入っていまして、赤経ウオームホイールカバーの取り外しがかなり厳しかったので、
改造は必要最小限にし、NS-5000用の赤経、赤緯コネクタを取り付けるだけにしました。
赤緯モータは中継コネクタを介してNS-5000につなぎます。
また赤経はパネル・コネクタを改造しモータつなぎました。作業は完了しました。明日、テストする予定です。
はじめの予定は、赤緯体に接続コネクタを取付け、本体側は不要なパーツ、ドライバ等をバッサリ、切断か取り外しを考えていましたが、狭い空間にケーブル、コネクタなどぎっしり入っていまして、赤経ウオームホイールカバーの取り外しがかなり厳しかったので、
改造は必要最小限にし、NS-5000用の赤経、赤緯コネクタを取り付けるだけにしました。
赤緯モータは中継コネクタを介してNS-5000につなぎます。
また赤経はパネル・コネクタを改造しモータつなぎました。作業は完了しました。明日、テストする予定です。
 |  |  |
SKYMAXは無事動きました。
NS-5000v3SKYMAX-BIPOLAR
恒星時速度は80pps 1/8マイクロステップ、
恒星時追尾、オートガイド、低速時では、サイレント・マイクロステップによる無音無振動で動きます。
高速は、無負荷、テスト電源16Vで200倍以上出ました。
望遠鏡を載せた状態、定格電圧24Vなら、300倍以上でる可能性があると思います。
恒星時追尾の状態ですが、モータ音、振動はまったく確認できませんでした。すごいと思います。
SKYMAXはこれまで何台か制作しましたが、NS-5000v3SKYMAX-BIPOLARは今度が初めてです。
お客様の反応が楽しみです。
今日、発送する予定です。
NS-5000v3SKYMAX-BIPOLAR
恒星時速度は80pps 1/8マイクロステップ、
恒星時追尾、オートガイド、低速時では、サイレント・マイクロステップによる無音無振動で動きます。
高速は、無負荷、テスト電源16Vで200倍以上出ました。
望遠鏡を載せた状態、定格電圧24Vなら、300倍以上でる可能性があると思います。
恒星時追尾の状態ですが、モータ音、振動はまったく確認できませんでした。すごいと思います。
SKYMAXはこれまで何台か制作しましたが、NS-5000v3SKYMAX-BIPOLARは今度が初めてです。
お客様の反応が楽しみです。
今日、発送する予定です。
 ESP32(bluetooth/WiFi用) 14個入荷しました。Dig-Key(米国)へ4/16注文、4/21今朝到着です。コロナが広がっていますが商品配送は大丈夫なようです。 |
ESP32(bluetooth/WiFi用) 14個入荷しました。Dig-Key(米国)へ4/16注文、4/21今朝到着です。コロナが広がっていますが商品配送は大丈夫なようです。
 我が家の黒猫クロ、チョロをご紹介します。兄弟、オス、8才で、今撮ってきました。かわいいです。 |
我が家の黒猫クロ、チョロをご紹介します。兄弟、オス、8才で、今撮ってきました。かわいいです。
 NS-5000 ESP32v1ボードを製作中です、これでbluetooth/WiFiを実現します。 |
NS-5000 ESP32v1ボードを製作中です、これでbluetooth/WiFiを実現します。
 古い機種になりますが、ケンコーβプラズマ赤道儀のご依頼をいただきました。今日、モータは無事到着しました。
たぶんβプラズマは初めてかもしれません。
今回はNS-501GPでβプラズマを動かします。
βプラズマはEM200と同じモータを使用していました。
NS-501GPはGP赤道儀の他に、EM200/EM10、NJP/JP(PD5XYなど)各純正モータに対応可能です。
NS-501GPは標準でbluetooth内蔵です、パフォーマンスは高いと思います。価格は同じです。 |
古い機種になりますが、ケンコーβプラズマ赤道儀のご依頼をいただきました。今日、モータは無事到着しました。
たぶんβプラズマは初めてかもしれません。
今回はNS-501GPでβプラズマを動かします。
βプラズマはEM200と同じモータを使用していました。
NS-501GPはGP赤道儀の他に、EM200/EM10、NJP/JP(PD5XYなど)各純正モータに対応可能です。
NS-501GPは標準でbluetooth内蔵です、パフォーマンスは高いと思います。価格は同じです。
たぶんβプラズマは初めてかもしれません。
今回はNS-501GPでβプラズマを動かします。
βプラズマはEM200と同じモータを使用していました。
NS-501GPはGP赤道儀の他に、EM200/EM10、NJP/JP(PD5XYなど)各純正モータに対応可能です。
NS-501GPは標準でbluetooth内蔵です、パフォーマンスは高いと思います。価格は同じです。
SKYMAXのお客様から動画が届きました。
https://www.youtube.com/watch?v=_BqVKTi205k
しかしまだ調整が完了していない状態です。
モータは動いていますが、SKYMAX恒星時の負荷が重いようで、肝心の恒星時追尾が動いていません。
NS5000は恒星時、低振動化の目的で、トルクを低めに抑えています、これを修正します。
https://www.youtube.com/watch?v=_BqVKTi205k
しかしまだ調整が完了していない状態です。
モータは動いていますが、SKYMAX恒星時の負荷が重いようで、肝心の恒星時追尾が動いていません。
NS5000は恒星時、低振動化の目的で、トルクを低めに抑えています、これを修正します。
2020/05/01 22:07に更新
 今日、ギョウジャニンニク(アイヌネギとも言います)をたくさん頂きました。さっそく手分けして水洗い、汚れを取り、湯通し、水切りして、半分冷凍庫で保存、醤油漬け、酢味噌和えにしました。また晩ごはんは天ぷらで食べました。とても美味しかったです。 |
今日、ギョウジャニンニク(アイヌネギとも言います)をたくさん頂きました。さっそく手分けして水洗い、汚れを取り、湯通し、水切りして、半分冷凍庫で保存、醤油漬け、酢味噌和えにしました。また晩ごはんは天ぷらで食べました。とても美味しかったです。
 今日、アンフェノール14P、USB-RS232C変換ケーブル、ケース、スイッチ入荷しました。 |
今日、アンフェノール14P、USB-RS232C変換ケーブル、ケース、スイッチ入荷しました。
 |  |  |
NS-5000PKP264NJP ベルト仕様のお客様から写真がとどきました。今夜は北海道滝川市江部乙のマルカ高原駐車場で撮影されるそうです。景色のいいところですね。
 今日はだいぶ作業を進める予定でしたが、都合で明日以降になりそうです。
1 ケンコーβプラズマ NS-501GP
2 NS-5000PKP243NJP アンフェノールコネクタへ改造
モータドライブは、くわなの星空 特製NJPモータです。
3 NS-5000v3PKP264NJP-BIPOLAR スターベース東京様
モータは、ギア式からベルト式へ改造した中古モータです。
4 あとパルステックエンコーダ修理?、他お待たせしています。 |
今日はだいぶ作業を進める予定でしたが、都合で明日以降になりそうです。
1 ケンコーβプラズマ NS-501GP
2 NS-5000PKP243NJP アンフェノールコネクタへ改造
モータドライブは、くわなの星空 特製NJPモータです。
3 NS-5000v3PKP264NJP-BIPOLAR スターベース東京様
モータは、ギア式からベルト式へ改造した中古モータです。
4 あとパルステックエンコーダ修理?、他お待たせしています。
1 ケンコーβプラズマ NS-501GP
2 NS-5000PKP243NJP アンフェノールコネクタへ改造
モータドライブは、くわなの星空 特製NJPモータです。
3 NS-5000v3PKP264NJP-BIPOLAR スターベース東京様
モータは、ギア式からベルト式へ改造した中古モータです。
4 あとパルステックエンコーダ修理?、他お待たせしています。
 昨日のつづきです。3台、写真のところまでできました。
左から、
1 NS-5000v3PKP264NJP-BIPOLAR スターベース東京様
2 NS-501v3GP ケンコーβプラズマ赤道儀用
3 NS-5000PKP243A1 くわなの星空特製NJPモータ用、
アンフェノールコネクタへ改造しました。
テストはOK、明日発送の予定です。
1日でこれが精一杯でした。 |
昨日のつづきです。3台、写真のところまでできました。
左から、
1 NS-5000v3PKP264NJP-BIPOLAR スターベース東京様
2 NS-501v3GP ケンコーβプラズマ赤道儀用
3 NS-5000PKP243A1 くわなの星空特製NJPモータ用、
アンフェノールコネクタへ改造しました。
テストはOK、明日発送の予定です。
1日でこれが精一杯でした。
左から、
1 NS-5000v3PKP264NJP-BIPOLAR スターベース東京様
2 NS-501v3GP ケンコーβプラズマ赤道儀用
3 NS-5000PKP243A1 くわなの星空特製NJPモータ用、
アンフェノールコネクタへ改造しました。
テストはOK、明日発送の予定です。
1日でこれが精一杯でした。
 昨日はNS-5000PKP243A1 くわなの星空特製NJP一式、今日はケンコーβプラズマ用NS-501GPを発送しました。
それぞれの基本的な仕様は、
NS-5000PKP243A1 くわなの星空特製NJPは、
ユニポーラ駆動 1/16マイクロステップ 恒星時148pps
ケンコーβプラズマ用NS-501GP
ユニポーラ駆動 1/2ハーフステップ 恒星時40pps
βプラズマはEM200と同じモータでしたが、高速があまり伸びず、電源16Vでx40倍速ぐらい、物足りない結果でした。 |
昨日はNS-5000PKP243A1 くわなの星空特製NJP一式、今日はケンコーβプラズマ用NS-501GPを発送しました。
それぞれの基本的な仕様は、
NS-5000PKP243A1 くわなの星空特製NJPは、
ユニポーラ駆動 1/16マイクロステップ 恒星時148pps
ケンコーβプラズマ用NS-501GP
ユニポーラ駆動 1/2ハーフステップ 恒星時40pps
βプラズマはEM200と同じモータでしたが、高速があまり伸びず、電源16Vでx40倍速ぐらい、物足りない結果でした。
それぞれの基本的な仕様は、
NS-5000PKP243A1 くわなの星空特製NJPは、
ユニポーラ駆動 1/16マイクロステップ 恒星時148pps
ケンコーβプラズマ用NS-501GP
ユニポーラ駆動 1/2ハーフステップ 恒星時40pps
βプラズマはEM200と同じモータでしたが、高速があまり伸びず、電源16Vでx40倍速ぐらい、物足りない結果でした。
 |  |  |
NS5000 bluetooth/WiFi用CPUボードにプログラミングしましたが、ついでに先日購入したESP32-CAMというネットワークカメラを試しました。プログラム書き込みはNS5000のCPUボードでOKです。WiFiルータに接続し、ブラウザ上で静止画、動画を見ることができます。
モバイルバッテリで簡単に動作します。
予想以上の画像でした。ブラウザからいろいろな機能を試すことができます。これなら防犯カメラとかドーム、望遠鏡の監視に使えると思いました。
モバイルバッテリで簡単に動作します。
予想以上の画像でした。ブラウザからいろいろな機能を試すことができます。これなら防犯カメラとかドーム、望遠鏡の監視に使えると思いました。
 NS-5000v3PKP264NJP-BIPOLAR スターベース東京様
ギア式からベルト式に改造したもの。(中古)
作業全部終わりました。
明日発送します。
最高速度は、電源16V、モータ単体、恒星時64pps 1/16マイクロステップ、赤経、赤緯とも上限のx450でも脱調しませんでした。またサイレントマイクロステップ駆動により、恒星時、オートガイドは無音無振動です。
基本的な仕様は、
赤経
1ステップ角1.8゜、1/16分割、減速ギア比7.2、伝達ギア比1、ウオームギア240:1
恒星時速度 = 64.175 pps
赤緯
1ステップ角1.8゜、1/16分割、減速ギア比7.2、伝達ギア比1.6 、ウオームギア144:1
恒星時速度 = 61.608 pps |
NS-5000v3PKP264NJP-BIPOLAR スターベース東京様
ギア式からベルト式に改造したもの。(中古)
作業全部終わりました。
明日発送します。
最高速度は、電源16V、モータ単体、恒星時64pps 1/16マイクロステップ、赤経、赤緯とも上限のx450でも脱調しませんでした。またサイレントマイクロステップ駆動により、恒星時、オートガイドは無音無振動です。
基本的な仕様は、
赤経
1ステップ角1.8゜、1/16分割、減速ギア比7.2、伝達ギア比1、ウオームギア240:1
恒星時速度 = 64.175 pps
赤緯
1ステップ角1.8゜、1/16分割、減速ギア比7.2、伝達ギア比1.6 、ウオームギア144:1
恒星時速度 = 61.608 pps
ギア式からベルト式に改造したもの。(中古)
作業全部終わりました。
明日発送します。
最高速度は、電源16V、モータ単体、恒星時64pps 1/16マイクロステップ、赤経、赤緯とも上限のx450でも脱調しませんでした。またサイレントマイクロステップ駆動により、恒星時、オートガイドは無音無振動です。
基本的な仕様は、
赤経
1ステップ角1.8゜、1/16分割、減速ギア比7.2、伝達ギア比1、ウオームギア240:1
恒星時速度 = 64.175 pps
赤緯
1ステップ角1.8゜、1/16分割、減速ギア比7.2、伝達ギア比1.6 、ウオームギア144:1
恒星時速度 = 61.608 pps
 EM-11 TEMMA3が発表されたので、NS-5000と比較してみました。http://www.takahashijapan.com/ct-news/news_topics/news_25v20_em11t3nr.html
面白い仕様、システム構成です。国内メーカでUSBを採用したのは今回が初めて?かもしれません。影響力がありそうです。
NS-5000バージョンアップの手がかりができました。
何か情報がありましたら、ぜひ教えて下さい。 |
EM-11 TEMMA3が発表されたので、NS-5000と比較してみました。http://www.takahashijapan.com/ct-news/news_topics/news_25v20_em11t3nr.html
面白い仕様、システム構成です。国内メーカでUSBを採用したのは今回が初めて?かもしれません。影響力がありそうです。
NS-5000バージョンアップの手がかりができました。
何か情報がありましたら、ぜひ教えて下さい。
面白い仕様、システム構成です。国内メーカでUSBを採用したのは今回が初めて?かもしれません。影響力がありそうです。
NS-5000バージョンアップの手がかりができました。
何か情報がありましたら、ぜひ教えて下さい。
 NS-5000ユニポーラ基板。中国、深センの工場へ注文、10日で到着、早いです。品質は問題ありません。 |
NS-5000ユニポーラ基板。中国、深センの工場へ注文、10日で到着、早いです。品質は問題ありません。
 |  |  |
NS-5000用ケースが届きました。従来の金属(パネルはプラスチック)ケースから新しいプラスチックケース(保護ゴムカバー付)を検討しています。
 |  |  |  |
1983年、当時取組んだ業務用TVゲーム機の回路図です。仕事の一環で基板を調べプログラミングマニュアルを作り、新ゲームを企画、開発、完成までやりました。開発期間3~4ヶ月ぐらい?
これはある商社からのご依頼で人気のないゲーム機の不良在庫が沢山あるから新ゲームを作り販売したいでした。
プロジェクトは3人集まり、私はハードの調査、プログラミングマニュアル製作、サウンドとプログラミング全般をサポートをしました。開発はいつも夕方から都内の新宿歌舞伎町近くの神社を抜けたあたりのビル一室で行いました。マシンはCP/M,マクロ80、プログラムはEDコマンド入力しました。
資料は一式残っています。後で他で投稿したいなあと思います。
この時まだ20代、頑張ってたなあと思います。
平均的なゲーム機だと思います。
それから人気のないゲーム機とはこれかも?
youtube.com/watch?v=K-p67gWimZM
これはある商社からのご依頼で人気のないゲーム機の不良在庫が沢山あるから新ゲームを作り販売したいでした。
プロジェクトは3人集まり、私はハードの調査、プログラミングマニュアル製作、サウンドとプログラミング全般をサポートをしました。開発はいつも夕方から都内の新宿歌舞伎町近くの神社を抜けたあたりのビル一室で行いました。マシンはCP/M,マクロ80、プログラムはEDコマンド入力しました。
資料は一式残っています。後で他で投稿したいなあと思います。
この時まだ20代、頑張ってたなあと思います。
平均的なゲーム機だと思います。
それから人気のないゲーム機とはこれかも?
youtube.com/watch?v=K-p67gWimZM
 お客様(NS-302 Digital Setting Circlesユーザ)からエンコーダ修理のご依頼がありました、すでに中のICは廃止品、在庫と交換します。修理は後でなんとかしたいのですが・・
左がお客様の、コネクタ部が違いますがどちらも純正と思われます。 |
お客様(NS-302 Digital Setting Circlesユーザ)からエンコーダ修理のご依頼がありました、すでに中のICは廃止品、在庫と交換します。修理は後でなんとかしたいのですが・・
左がお客様の、コネクタ部が違いますがどちらも純正と思われます。
左がお客様の、コネクタ部が違いますがどちらも純正と思われます。
 パルステック、エンコーダを交換修理したお客様(NS-302 Digital Setting Circlesユーザ)からメールが届きました。
2020/07/05
「ようやく、本日、装着をさせることが出来ました。
ステラナビにもしっかりと追従しており、長年の夢であった
MS-5での手動ガイド導入がようやく実現しました。
まだまだ天候も悪く、夜空を見ることはできませんが、
晴れる日を楽しみに、星空散歩を楽しみたいと思います。」 |
パルステック、エンコーダを交換修理したお客様(NS-302 Digital Setting Circlesユーザ)からメールが届きました。
2020/07/05
「ようやく、本日、装着をさせることが出来ました。
ステラナビにもしっかりと追従しており、長年の夢であった
MS-5での手動ガイド導入がようやく実現しました。
まだまだ天候も悪く、夜空を見ることはできませんが、
晴れる日を楽しみに、星空散歩を楽しみたいと思います。」
2020/07/05
「ようやく、本日、装着をさせることが出来ました。
ステラナビにもしっかりと追従しており、長年の夢であった
MS-5での手動ガイド導入がようやく実現しました。
まだまだ天候も悪く、夜空を見ることはできませんが、
晴れる日を楽しみに、星空散歩を楽しみたいと思います。」
 NS-501EM200 (B型、スターベース東京様)のご注文を頂きましたのでEM200パネルを製作します。素材はアルミ、ステンレスを選べますがアルミ板2mm厚で作ることにします。
NS-501はGP用がメインですが、他にNJP用、
さらにEM200,EM10、ケンコーβプラズマ用を製作できます。 |
NS-501EM200 (B型、スターベース東京様)のご注文を頂きましたのでEM200パネルを製作します。素材はアルミ、ステンレスを選べますがアルミ板2mm厚で作ることにします。
NS-501はGP用がメインですが、他にNJP用、
さらにEM200,EM10、ケンコーβプラズマ用を製作できます。
NS-501はGP用がメインですが、他にNJP用、
さらにEM200,EM10、ケンコーβプラズマ用を製作できます。
 EM200パネル板到着、でき上がりはこんな感じです。 |
EM200パネル板到着、でき上がりはこんな感じです。
 今日、2台ほぼ完成です。左からNS-501GP(静岡市)、NS-501EM200(スターベース東京様) |
今日、2台ほぼ完成です。左からNS-501GP(静岡市)、NS-501EM200(スターベース東京様)
 |  |
パルステック、エンコーダのお客様(7月6日投稿)から改めてメールを頂きました。ありがとうございます。お役に立ててとても嬉しいです。
2020/07/26
「お世話になります。
先日お送りした写真にNS302が写っていませんでしたので
取り直しました。
・筒鏡は半年前に購入した国際光器とNTKのコラボ品の320mmF5?
*ガイドはBLANCA70EDT試作品+QHY5L-2です。
先日、幸運にも30分ほど晴れ間がのぞいたので土星、木星の観望を行った時にNS302にてデネブからM13までのガイドを行いましたが、視野の真ん中にきちんと収まってくれました!
感動です!
これからの梅雨けが待ち遠しいです。
今後、MS5の自動導入も検討したいと思いますが、しばらくは星空を勉強する意味でもNS302にて、手動導入を楽しませて頂きたいと思います。」
2020/07/26
「お世話になります。
先日お送りした写真にNS302が写っていませんでしたので
取り直しました。
・筒鏡は半年前に購入した国際光器とNTKのコラボ品の320mmF5?
*ガイドはBLANCA70EDT試作品+QHY5L-2です。
先日、幸運にも30分ほど晴れ間がのぞいたので土星、木星の観望を行った時にNS302にてデネブからM13までのガイドを行いましたが、視野の真ん中にきちんと収まってくれました!
感動です!
これからの梅雨けが待ち遠しいです。
今後、MS5の自動導入も検討したいと思いますが、しばらくは星空を勉強する意味でもNS302にて、手動導入を楽しませて頂きたいと思います。」
 |  |
今日NS-501GP(静岡市)発送しました。
NS-501EM200(スターベース東京様)は初期化、テストは全部OKでした、パネルはあと少しです。明日発送します。
NS-501EM200(スターベース東京様)は初期化、テストは全部OKでした、パネルはあと少しです。明日発送します。
 EM200 TEMMA赤道儀の基本的な仕様について一覧表を作りました。TEMMA PC,2,2Jr・?・いろいろあって分からなかったので整理しました。データはタカハシ サイトからです。
基本的に赤道儀はTEMMA PCからTEMMA3まで全部同じ仕様です。違いは基本的にステッピングモータとそれを駆動するモータドライブ側にあります。また一部エンコーダ(座標計測用です)を使っています。NS-5000はエンコーダは不要です。
TEMMA PC ,2 ,2Jrは自動導入
TEMMA USDⅡ ,3はスピードが早い2軸モータドライブ
表を見てTEMMAシステムの開発の経過が伝わってきます。
たいへん苦労されているように思いました。 |
EM200 TEMMA赤道儀の基本的な仕様について一覧表を作りました。TEMMA PC,2,2Jr・?・いろいろあって分からなかったので整理しました。データはタカハシ サイトからです。
基本的に赤道儀はTEMMA PCからTEMMA3まで全部同じ仕様です。違いは基本的にステッピングモータとそれを駆動するモータドライブ側にあります。また一部エンコーダ(座標計測用です)を使っています。NS-5000はエンコーダは不要です。
TEMMA PC ,2 ,2Jrは自動導入
TEMMA USDⅡ ,3はスピードが早い2軸モータドライブ
表を見てTEMMAシステムの開発の経過が伝わってきます。
たいへん苦労されているように思いました。
基本的に赤道儀はTEMMA PCからTEMMA3まで全部同じ仕様です。違いは基本的にステッピングモータとそれを駆動するモータドライブ側にあります。また一部エンコーダ(座標計測用です)を使っています。NS-5000はエンコーダは不要です。
TEMMA PC ,2 ,2Jrは自動導入
TEMMA USDⅡ ,3はスピードが早い2軸モータドライブ
表を見てTEMMAシステムの開発の経過が伝わってきます。
たいへん苦労されているように思いました。
 NS-5000GPを発送しました。(基板はVer3です)
低振動化のために、以下2点の機能を内蔵しました。
1 恒星時速度は19ppsから154ppsへ(マイクロステップ)
2 カレントダウン調整ボリューム
GP赤道儀の場合はとくにオプションを付けずにご案内することが多いのですが、お客様から以下のメールを頂き、低振動化のオプションをご案内しました。
8月16日
「納期の件、了解しました。特に急いではおりません。
当方、ベランダにGPDを据付け、主に惑星撮影に使用します。
(時々、星野撮影もします)
振動の面で気を遣うのですが、駆動周波数は何ppsになりますでしょうか。」
「さっそく回答ありがとうございます。
DD-3+MT-1でかなり振動があり、C8では眼視においてもブレてしまい解像度を落としています。
(電源を切ると模様がはっきりします)
現在、MTS-3SDI+に専用モーターにて駆動しており、駆動周波数は忘れましたが100pps以上で恒星時駆動しています。
19psですとDD-3と変わらず、現在の4800mmでの撮影は不可です。」
DD-3はGP用純正モータドライブ、恒星時19ppsで,
この場合は明らかにモータ振動の影響が出ています。
またMTS-3SDIは外国製の導入装置で、モータはPM型、恒星時は100pps以上?ですが、振動の問題が解決しているか否かは確認していませんが、NS5000GPをご注文頂きました。
GPD赤道儀のモータ振動が、NS-5000GPにより解決出来るのか?注目しています・・・ |
NS-5000GPを発送しました。(基板はVer3です)
低振動化のために、以下2点の機能を内蔵しました。
1 恒星時速度は19ppsから154ppsへ(マイクロステップ)
2 カレントダウン調整ボリューム
GP赤道儀の場合はとくにオプションを付けずにご案内することが多いのですが、お客様から以下のメールを頂き、低振動化のオプションをご案内しました。
8月16日
「納期の件、了解しました。特に急いではおりません。
当方、ベランダにGPDを据付け、主に惑星撮影に使用します。
(時々、星野撮影もします)
振動の面で気を遣うのですが、駆動周波数は何ppsになりますでしょうか。」
「さっそく回答ありがとうございます。
DD-3+MT-1でかなり振動があり、C8では眼視においてもブレてしまい解像度を落としています。
(電源を切ると模様がはっきりします)
現在、MTS-3SDI+に専用モーターにて駆動しており、駆動周波数は忘れましたが100pps以上で恒星時駆動しています。
19psですとDD-3と変わらず、現在の4800mmでの撮影は不可です。」
DD-3はGP用純正モータドライブ、恒星時19ppsで,
この場合は明らかにモータ振動の影響が出ています。
またMTS-3SDIは外国製の導入装置で、モータはPM型、恒星時は100pps以上?ですが、振動の問題が解決しているか否かは確認していませんが、NS5000GPをご注文頂きました。
GPD赤道儀のモータ振動が、NS-5000GPにより解決出来るのか?注目しています・・・
低振動化のために、以下2点の機能を内蔵しました。
1 恒星時速度は19ppsから154ppsへ(マイクロステップ)
2 カレントダウン調整ボリューム
GP赤道儀の場合はとくにオプションを付けずにご案内することが多いのですが、お客様から以下のメールを頂き、低振動化のオプションをご案内しました。
8月16日
「納期の件、了解しました。特に急いではおりません。
当方、ベランダにGPDを据付け、主に惑星撮影に使用します。
(時々、星野撮影もします)
振動の面で気を遣うのですが、駆動周波数は何ppsになりますでしょうか。」
「さっそく回答ありがとうございます。
DD-3+MT-1でかなり振動があり、C8では眼視においてもブレてしまい解像度を落としています。
(電源を切ると模様がはっきりします)
現在、MTS-3SDI+に専用モーターにて駆動しており、駆動周波数は忘れましたが100pps以上で恒星時駆動しています。
19psですとDD-3と変わらず、現在の4800mmでの撮影は不可です。」
DD-3はGP用純正モータドライブ、恒星時19ppsで,
この場合は明らかにモータ振動の影響が出ています。
またMTS-3SDIは外国製の導入装置で、モータはPM型、恒星時は100pps以上?ですが、振動の問題が解決しているか否かは確認していませんが、NS5000GPをご注文頂きました。
GPD赤道儀のモータ振動が、NS-5000GPにより解決出来るのか?注目しています・・・
西岡定彦さんが近況アップデートを投稿しました。
アスコ(旭精光)SR210型赤道儀のNS-5000化のお問い合わせをいただきました。アスコは受注生産で仕様がいろいろあるそうですが、これは全周微動、5相モータです。
・旭精光 SR210型
・ウォーム歯数(実測):
RA = 282歯
DEC= 280歯
・中間ギア:
RA = 56T:22T
DEC= 1:1(44T:44Tタイミングベルトに変更)
・モータ:
RA = PK564AW-T10 THギアード
DEC= PK564BW-H50S ハーモニックギヤード
DECモータはなんとベルトドライブにハーモニックギアを使っています。お客様のふかい意図が感じられます。
・旭精光 SR210型
・ウォーム歯数(実測):
RA = 282歯
DEC= 280歯
・中間ギア:
RA = 56T:22T
DEC= 1:1(44T:44Tタイミングベルトに変更)
・モータ:
RA = PK564AW-T10 THギアード
DEC= PK564BW-H50S ハーモニックギヤード
DECモータはなんとベルトドライブにハーモニックギアを使っています。お客様のふかい意図が感じられます。
 3台製作中です。
左からアスコ(旭精光)SR210型5相モータドライバ用、そして旧アトラクスNS-5000バイポーラ駆動用、bluetooth取付用(基板交換します、アストロショップAU様)
旧アトラクス用は納期が今週木曜か金曜のご希望です。
間に合うと思いますが、bluetoothの方は基板がVer1で改造が難しく、基板交換(Ver3)で対応させていただきます。
しかしbluetoothドングルの入荷が早くて水曜になるかもしれません。一緒に発送できるかは微妙な状況ですね。
旧アトラクス用NS-5000ATLUX-BIPOLARで動かすと恒星時追尾、オートガイドは無音、無振動になります。
ただし最高速は約50倍速です。 |
3台製作中です。
左からアスコ(旭精光)SR210型5相モータドライバ用、そして旧アトラクスNS-5000バイポーラ駆動用、bluetooth取付用(基板交換します、アストロショップAU様)
旧アトラクス用は納期が今週木曜か金曜のご希望です。
間に合うと思いますが、bluetoothの方は基板がVer1で改造が難しく、基板交換(Ver3)で対応させていただきます。
しかしbluetoothドングルの入荷が早くて水曜になるかもしれません。一緒に発送できるかは微妙な状況ですね。
旧アトラクス用NS-5000ATLUX-BIPOLARで動かすと恒星時追尾、オートガイドは無音、無振動になります。
ただし最高速は約50倍速です。
左からアスコ(旭精光)SR210型5相モータドライバ用、そして旧アトラクスNS-5000バイポーラ駆動用、bluetooth取付用(基板交換します、アストロショップAU様)
旧アトラクス用は納期が今週木曜か金曜のご希望です。
間に合うと思いますが、bluetoothの方は基板がVer1で改造が難しく、基板交換(Ver3)で対応させていただきます。
しかしbluetoothドングルの入荷が早くて水曜になるかもしれません。一緒に発送できるかは微妙な状況ですね。
旧アトラクス用NS-5000ATLUX-BIPOLARで動かすと恒星時追尾、オートガイドは無音、無振動になります。
ただし最高速は約50倍速です。
 時々、機種変更とかグレードアップのためにNS5000下取り、基板交換します。
左から、バイポーラ用、PK243A1/EM200HB用(オートガイダーVST内蔵)、NJP用(PK264A2、ギア、ベルト対応、VST内蔵、下取り、完動品です)他にもまだあったと思います。
中古品になりますが、お客様のご希望によりご案内できます。 |
時々、機種変更とかグレードアップのためにNS5000下取り、基板交換します。
左から、バイポーラ用、PK243A1/EM200HB用(オートガイダーVST内蔵)、NJP用(PK264A2、ギア、ベルト対応、VST内蔵、下取り、完動品です)他にもまだあったと思います。
中古品になりますが、お客様のご希望によりご案内できます。
左から、バイポーラ用、PK243A1/EM200HB用(オートガイダーVST内蔵)、NJP用(PK264A2、ギア、ベルト対応、VST内蔵、下取り、完動品です)他にもまだあったと思います。
中古品になりますが、お客様のご希望によりご案内できます。
 アスコ(旭精光)SR210型モータドライバ用、そして旧アトラクス用NS-5000ATLUX-BIPOLARはだいぶ出来上がりました。明日完成予定です。 |
アスコ(旭精光)SR210型モータドライバ用、そして旧アトラクス用NS-5000ATLUX-BIPOLARはだいぶ出来上がりました。明日完成予定です。
 |  |  |
bluetooth取付(NS5000PKP264A2NJP基板交換しました、アストロショップAU様)は完了しました。
また電源スイッチ交換、それにLEDランプ、圧電ブザーを改良しました。動作テストOKです。
また電源スイッチ交換、それにLEDランプ、圧電ブザーを改良しました。動作テストOKです。
 |  |
アスコ(旭精光)SR210型モータドライバ用NS-5000PLS/DIR、旧アトラクス用NS-5000ATLUX-BIPOLAR(サイレントマイクロステップ)、NS-5000PKP264A2NJP bluetooth取付、3台製作完了しました。明日発送いたします。
アスコ(旭精光)は、これからSR210赤道儀用初期化データ、配線資料等を用意します。
アスコ(旭精光)は、これからSR210赤道儀用初期化データ、配線資料等を用意します。
西岡定彦さんが近況アップデートを投稿しました。
アスコ(旭精光)SR210型赤道儀NS-5000化のつづきです。
恒星時速度など計算してます。
NS-5000本体は完成しています。
5相モータドライバ 5D14C
********** 1/2 ハーフステップ駆動
赤経 RAモータ PK564AW-T10 THギアード
1ステップ角0.72゜、1/2分割 、減速ギア比10:1、伝達ギア比56:22、ウオームギア282:1
恒星時速度 = ( 500 * 2 * 10 * 56/22 * 282 ) / 86164 = 83.308 pps
基本定数 ( 500 * 2 * 10 * 56/22 * 282 ) = 7178181 0x006D87C5
赤緯 DECモータ PK564BW-H50S ハーモニックギヤード
1ステップ角0.72゜、1/2分割 、減速ギア比50:1、伝達ギア比1:1、ウオームギア280:1
恒星時速度 = ( 500 * 2 * 50 * 1 * 280 ) / 86164 = 162.480 pps
基本定数 ( 500 * 2 * 50 * 1 * 280 ) = 14000000 0x00D59F80
スピードデータ等を作成、初期化して明日発送できると思います。
恒星時速度など計算してます。
NS-5000本体は完成しています。
5相モータドライバ 5D14C
********** 1/2 ハーフステップ駆動
赤経 RAモータ PK564AW-T10 THギアード
1ステップ角0.72゜、1/2分割 、減速ギア比10:1、伝達ギア比56:22、ウオームギア282:1
恒星時速度 = ( 500 * 2 * 10 * 56/22 * 282 ) / 86164 = 83.308 pps
基本定数 ( 500 * 2 * 10 * 56/22 * 282 ) = 7178181 0x006D87C5
赤緯 DECモータ PK564BW-H50S ハーモニックギヤード
1ステップ角0.72゜、1/2分割 、減速ギア比50:1、伝達ギア比1:1、ウオームギア280:1
恒星時速度 = ( 500 * 2 * 50 * 1 * 280 ) / 86164 = 162.480 pps
基本定数 ( 500 * 2 * 50 * 1 * 280 ) = 14000000 0x00D59F80
スピードデータ等を作成、初期化して明日発送できると思います。
 旧アトラクス用NS-5000のお問い合わせをいただきました。(愛知県)先日のCPUボードを改造して対応します。ケース加工等ほぼ完了です。あとアンフェノールコネクタ入荷待ちですがもう少し掛かりそうです。 |
旧アトラクス用NS-5000のお問い合わせをいただきました。(愛知県)先日のCPUボードを改造して対応します。ケース加工等ほぼ完了です。あとアンフェノールコネクタ入荷待ちですがもう少し掛かりそうです。
 旧アトラクス用NS-5000完成しました。テストは全部OKです。今日発送します。 |
旧アトラクス用NS-5000完成しました。テストは全部OKです。今日発送します。
西岡定彦さんが近況アップデートを投稿しました。
TEMMAについて調べていますが、同様にVixenの赤道儀も検討しています。
2020,10/4
Vixenサイトより
機種 恒星時 最高速 STAR BOOK? nterface 定価(万)
AXD2 400pps x800 TEN D-sub9P 98
AXJ 300pps x800 TEN D-sub9P 70
SX2 400pps x1000 ONE,TEN可能 D-sub9P 20
SXD2 400pps 10000 TEN D-sub9P 33
SXP2 400pps x800 TEN D-sub9P 52
AP ONE(option) D-sub9P 12.8から(両軸、Kyoei)
STAR BOOK TEN ,ONE について
電源電圧は、 TEN 12V 5Vは不可、しかし5Vでも動作するとの指摘がある
ONE 12V 又は 5-6V(USB,電池)
STAR BOOK TENとONEは互換性(D-sub9P)があり差し替えできる。
STAR BOOK ONEはすべての機種で使えると思われる。
STAR BOOK TENは APをサポートしていない。しかし裏技で接続、動作できる。
AP赤道儀にTENを接続した場合APを認識するのか?(赤道儀を自動判別?)
interfaceに興味があります。何か情報がありましたら教えて下さい。
2020,10/4
Vixenサイトより
機種 恒星時 最高速 STAR BOOK? nterface 定価(万)
AXD2 400pps x800 TEN D-sub9P 98
AXJ 300pps x800 TEN D-sub9P 70
SX2 400pps x1000 ONE,TEN可能 D-sub9P 20
SXD2 400pps 10000 TEN D-sub9P 33
SXP2 400pps x800 TEN D-sub9P 52
AP ONE(option) D-sub9P 12.8から(両軸、Kyoei)
STAR BOOK TEN ,ONE について
電源電圧は、 TEN 12V 5Vは不可、しかし5Vでも動作するとの指摘がある
ONE 12V 又は 5-6V(USB,電池)
STAR BOOK TENとONEは互換性(D-sub9P)があり差し替えできる。
STAR BOOK ONEはすべての機種で使えると思われる。
STAR BOOK TENは APをサポートしていない。しかし裏技で接続、動作できる。
AP赤道儀にTENを接続した場合APを認識するのか?(赤道儀を自動判別?)
interfaceに興味があります。何か情報がありましたら教えて下さい。
 |  |
STAR BOOK ONE(アストロショップAU様)が到着しました。ありがとうございました。さっそく調べています。
CPUはルネサス(日立)のRX200シリーズでかなり強力です。LCDモジュールはRoHSのシールが貼ってあり、これはヨーロッパ向けの認定を取得しているようです。
レギュレータは3.3Vです。今日はこれに集中します。
CPUはルネサス(日立)のRX200シリーズでかなり強力です。LCDモジュールはRoHSのシールが貼ってあり、これはヨーロッパ向けの認定を取得しているようです。
レギュレータは3.3Vです。今日はこれに集中します。
 |  |  |  |  |
STAR BOOK ONEとAP赤道儀を調べています。だいぶ仕組みを理解できました。その内容をご紹介する予定です。
1 ONEとAP赤道儀をつないで調べているところです。
2 ONEとAP間の通信波形です。およそ38400bps?
3 APの赤経モータユニット、ドライバ基板
4 APの赤経、赤緯モータモジュールです。
5 APのDサブ9pコネクタ、電源スイッチ、USBパネル
1 ONEとAP赤道儀をつないで調べているところです。
2 ONEとAP間の通信波形です。およそ38400bps?
3 APの赤経モータユニット、ドライバ基板
4 APの赤経、赤緯モータモジュールです。
5 APのDサブ9pコネクタ、電源スイッチ、USBパネル
 |  |  |
話は前後しますがAP赤道儀をNS5000化する方法として以下を考えました。
赤経モータモジュールは、赤経モータがあり、赤緯モータ信号が来ています。つまり内蔵の基板と同じ、基板サイズ、Dサブコネクタ位置にすれば、ピッタリ本体に収まります。
するとケーブル一本でNS-5000と接続完了です。
試しに厚紙で基板をつくりコネクタを付けてやってみます。
赤経モータモジュールは、赤経モータがあり、赤緯モータ信号が来ています。つまり内蔵の基板と同じ、基板サイズ、Dサブコネクタ位置にすれば、ピッタリ本体に収まります。
するとケーブル一本でNS-5000と接続完了です。
試しに厚紙で基板をつくりコネクタを付けてやってみます。
 AP赤道儀と同じサイズの基板(厚紙です)に、Dサブ9pコネクタを載せて取付けてみました。うまくいきました。基板はなんとかなりそうですが、横のスイッチが無いので、大きな穴ができてしまいます・・
APステッピングモータは調べました。
ユニポーラタイプのモータをバイポーラで動かしています。
実際に動かしてみます。 |
AP赤道儀と同じサイズの基板(厚紙です)に、Dサブ9pコネクタを載せて取付けてみました。うまくいきました。基板はなんとかなりそうですが、横のスイッチが無いので、大きな穴ができてしまいます・・
APステッピングモータは調べました。
ユニポーラタイプのモータをバイポーラで動かしています。
実際に動かしてみます。
APステッピングモータは調べました。
ユニポーラタイプのモータをバイポーラで動かしています。
実際に動かしてみます。
 AP赤道儀の赤経、赤緯モータユニットは完全に同じ物です。
アルミダイキャスト、加工精度はかなり高いと思います。
モータ動作テストをしますが、コネクタ(1.5mmピッチ)入手の都合で、4,5日かかりそうです。 |
AP赤道儀の赤経、赤緯モータユニットは完全に同じ物です。
アルミダイキャスト、加工精度はかなり高いと思います。
モータ動作テストをしますが、コネクタ(1.5mmピッチ)入手の都合で、4,5日かかりそうです。
アルミダイキャスト、加工精度はかなり高いと思います。
モータ動作テストをしますが、コネクタ(1.5mmピッチ)入手の都合で、4,5日かかりそうです。
 ZHコネクタ(AP赤道儀モータ用、1.5mmピッチで非常に小型です)が入荷しました。さっそくコネクタで接続ケーブルを作ろうとしたら、手持ち圧着工具が大きすぎて合いません。いろいろ試したのですがダメで、さらにはんだ付けもやっぱりだめで、ぜんぶコネクタに端子投入不可でした。ケーブル付きのコネクタを見つけて注文しました。明後日入荷予定です。それまで待つことにします。 |
ZHコネクタ(AP赤道儀モータ用、1.5mmピッチで非常に小型です)が入荷しました。さっそくコネクタで接続ケーブルを作ろうとしたら、手持ち圧着工具が大きすぎて合いません。いろいろ試したのですがダメで、さらにはんだ付けもやっぱりだめで、ぜんぶコネクタに端子投入不可でした。ケーブル付きのコネクタを見つけて注文しました。明後日入荷予定です。それまで待つことにします。
西岡定彦さんが近況アップデートを投稿しました。
APモータ駆動テストで裏技を思いつきました。後で試します、その前に恒星時速度について検討しました。
GP(MT-1)と比較します。
モータのステップ角は、GP 7.5° AP 18°
よって1回転ステップ数は、GP 48 AP 20
恒星時速度は、
ステップ数 減速ギア、1/2駆動、伝達ギア、ウオーム歯数
GP 48 x 120 x 2 x 1 x144 / 86400 = 19.2pps
AP伝達ギア比が不明なので5~8の範囲と仮定します。
AP 20 x 72 x 2 x 5 x144 / 86400 = 24pps
AP 20 x 72 x 2 x 6 x144 / 86400 = 28.8pps
AP 20 x 72 x 2 x 8 x144 / 86400 = 38.4pps
APの恒星時は(1/2ハーフステップの場合)、24~38ppsの範囲になりそうです。
GP(MT-1)と比較します。
モータのステップ角は、GP 7.5° AP 18°
よって1回転ステップ数は、GP 48 AP 20
恒星時速度は、
ステップ数 減速ギア、1/2駆動、伝達ギア、ウオーム歯数
GP 48 x 120 x 2 x 1 x144 / 86400 = 19.2pps
AP伝達ギア比が不明なので5~8の範囲と仮定します。
AP 20 x 72 x 2 x 5 x144 / 86400 = 24pps
AP 20 x 72 x 2 x 6 x144 / 86400 = 28.8pps
AP 20 x 72 x 2 x 8 x144 / 86400 = 38.4pps
APの恒星時は(1/2ハーフステップの場合)、24~38ppsの範囲になりそうです。
 APモータ接続ケーブルが作れました。さっそくユニポーラ駆動試したところ、あたりまえですが無事動きました。ホットしました。
NS5000はGP用に初期化し、AP赤緯モータに接続しました。
結局、GPの最高速50番でも脱調しませんでした。
この時のスピードは3400pps。電源は16Vです。
STAR BOOK ONEのx60と比較しました。
ピニオンギア3回転の時間をNS5000とONE(赤経)で比較しました。
ONE ピニオンギア3回転時間 約7.7秒
NS5000 約2.4秒
以上からおよそx180倍速になります。
あと電源12~24V、ユニポーラ、バイポーラ、マイクロステップ・・いろいろ実験します。
NS-5000APは少なくともONEのx60をクリアする必要があると思っていましたが、超えました。
実用化できそうです。 |
APモータ接続ケーブルが作れました。さっそくユニポーラ駆動試したところ、あたりまえですが無事動きました。ホットしました。
NS5000はGP用に初期化し、AP赤緯モータに接続しました。
結局、GPの最高速50番でも脱調しませんでした。
この時のスピードは3400pps。電源は16Vです。
STAR BOOK ONEのx60と比較しました。
ピニオンギア3回転の時間をNS5000とONE(赤経)で比較しました。
ONE ピニオンギア3回転時間 約7.7秒
NS5000 約2.4秒
以上からおよそx180倍速になります。
あと電源12~24V、ユニポーラ、バイポーラ、マイクロステップ・・いろいろ実験します。
NS-5000APは少なくともONEのx60をクリアする必要があると思っていましたが、超えました。
実用化できそうです。
NS5000はGP用に初期化し、AP赤緯モータに接続しました。
結局、GPの最高速50番でも脱調しませんでした。
この時のスピードは3400pps。電源は16Vです。
STAR BOOK ONEのx60と比較しました。
ピニオンギア3回転の時間をNS5000とONE(赤経)で比較しました。
ONE ピニオンギア3回転時間 約7.7秒
NS5000 約2.4秒
以上からおよそx180倍速になります。
あと電源12~24V、ユニポーラ、バイポーラ、マイクロステップ・・いろいろ実験します。
NS-5000APは少なくともONEのx60をクリアする必要があると思っていましたが、超えました。
実用化できそうです。
西岡定彦さんが近況アップデートを投稿しました。
AP赤道儀、最高速テストの中間結果です。
ユニポーラ駆動
電源12V x150
電源16V x180以上?
このモータでx180も出れば十分だと思います。
x100はモータはほとんど発熱しません。ぬるいお風呂ぐらい。
x180はかなり発熱しました。長時間の駆動は心配になります。
APは低電圧、12Vぐらいがいいような気がします。
ユニポーラ駆動
電源12V x150
電源16V x180以上?
このモータでx180も出れば十分だと思います。
x100はモータはほとんど発熱しません。ぬるいお風呂ぐらい。
x180はかなり発熱しました。長時間の駆動は心配になります。
APは低電圧、12Vぐらいがいいような気がします。
 AP赤道儀、最高速テストのつづきです。
ユニポーラ駆動。1/2ハーフステップ、電源12V x150
ユニポーラ駆動。1/16マイクロステップ、電源12V x145
バイポーラ駆動、1/2サイレント・マイクロステップ
電源12V x145 無音、無振動でした。
以上からAP赤道儀に相応しい駆動方法を決めたいと思います。 |
AP赤道儀、最高速テストのつづきです。
ユニポーラ駆動。1/2ハーフステップ、電源12V x150
ユニポーラ駆動。1/16マイクロステップ、電源12V x145
バイポーラ駆動、1/2サイレント・マイクロステップ
電源12V x145 無音、無振動でした。
以上からAP赤道儀に相応しい駆動方法を決めたいと思います。
ユニポーラ駆動。1/2ハーフステップ、電源12V x150
ユニポーラ駆動。1/16マイクロステップ、電源12V x145
バイポーラ駆動、1/2サイレント・マイクロステップ
電源12V x145 無音、無振動でした。
以上からAP赤道儀に相応しい駆動方法を決めたいと思います。
 AP赤道儀の接続方法を検討しています。
5日前に検討した基板交換の他に以下(写真)検討しています。
上は赤緯モジュールの純正カバーです。
下は検討中のカバーです。
基板を固定するようにスペーサーを取付、基板(厚紙です)下側にDサブコネクタを配置します。カバーはその形状に合わせて穴を開けます。
カバーの入手が困難と思われましたが、可能性が出てきました。Dサブコネクタは、9ピンかミニDサブ15pを検討中です。サイズは同じです。 |
AP赤道儀の接続方法を検討しています。
5日前に検討した基板交換の他に以下(写真)検討しています。
上は赤緯モジュールの純正カバーです。
下は検討中のカバーです。
基板を固定するようにスペーサーを取付、基板(厚紙です)下側にDサブコネクタを配置します。カバーはその形状に合わせて穴を開けます。
カバーの入手が困難と思われましたが、可能性が出てきました。Dサブコネクタは、9ピンかミニDサブ15pを検討中です。サイズは同じです。
5日前に検討した基板交換の他に以下(写真)検討しています。
上は赤緯モジュールの純正カバーです。
下は検討中のカバーです。
基板を固定するようにスペーサーを取付、基板(厚紙です)下側にDサブコネクタを配置します。カバーはその形状に合わせて穴を開けます。
カバーの入手が困難と思われましたが、可能性が出てきました。Dサブコネクタは、9ピンかミニDサブ15pを検討中です。サイズは同じです。
 これは昨日入荷した2.6mmスペーサ、ネジ、そしてありがたいワイヤ付きコネクタです。 |
これは昨日入荷した2.6mmスペーサ、ネジ、そしてありがたいワイヤ付きコネクタです。
西岡定彦さんが近況アップデートを投稿しました。
AP赤道儀、最高速追加テストの結果です。
ユニポーラ駆動、1/16マイクロステップ、電源10V x125
ユニポーラ駆動、1/16マイクロステップ、電源9V x110
NS5000 Ver3はギリギリ7V以上あれば動く可能性があります。電池6本で9V、あるいはモバイルバッテリ2個で10V、どちらもx100を超えました。
ユニポーラ駆動、1/16マイクロステップ、電源10V x125
ユニポーラ駆動、1/16マイクロステップ、電源9V x110
NS5000 Ver3はギリギリ7V以上あれば動く可能性があります。電池6本で9V、あるいはモバイルバッテリ2個で10V、どちらもx100を超えました。
 手持ちの基板を使ってNS-5000接続用基板をむりやり試作しています。 |
手持ちの基板を使ってNS-5000接続用基板をむりやり試作しています。
 試作中の接続用基板をモジュールに装着してみました。 |
試作中の接続用基板をモジュールに装着してみました。
 |  |  |  |
APモータカバーにDサブコネクタの穴を開けました。成功しました。これでNS-5000は確実に実用化できます。
 |  |  |
モータカバーのDサブコネクタですが、9pを15pへむりやり変えました。
 今日は、AP両軸モータモジュールをつなぎ、自動導入を確認し、試作機完了が目標です。
写真は接続を確認しているところですが、赤経モータモジュールが赤緯側、赤緯モータモジュールが赤経側にあります。
これはお客様にかなり影響があると思います。
赤経モータモジュールからドライブ基板とそのパネルを外すと、赤経、赤緯の違いがなくなり同じものとして扱うことができます。
つまり、赤経モータモジュール(STAR BOOK ONE付き)のかわりに赤緯モータモジュールでOKです。 |
今日は、AP両軸モータモジュールをつなぎ、自動導入を確認し、試作機完了が目標です。
写真は接続を確認しているところですが、赤経モータモジュールが赤緯側、赤緯モータモジュールが赤経側にあります。
これはお客様にかなり影響があると思います。
赤経モータモジュールからドライブ基板とそのパネルを外すと、赤経、赤緯の違いがなくなり同じものとして扱うことができます。
つまり、赤経モータモジュール(STAR BOOK ONE付き)のかわりに赤緯モータモジュールでOKです。
写真は接続を確認しているところですが、赤経モータモジュールが赤緯側、赤緯モータモジュールが赤経側にあります。
これはお客様にかなり影響があると思います。
赤経モータモジュールからドライブ基板とそのパネルを外すと、赤経、赤緯の違いがなくなり同じものとして扱うことができます。
つまり、赤経モータモジュール(STAR BOOK ONE付き)のかわりに赤緯モータモジュールでOKです。
 |  |  |
AP赤道儀はNS-5000で自動導入できました。赤経、赤緯モータともに良好に動いています。さっそく製品化の準備をはじめます。
明日、自動導入の様子を動画でご紹介します。
写真を追加します。
明日、自動導入の様子を動画でご紹介します。
写真を追加します。
NS-5000でAP赤道儀を動かしています。130倍速。
https://www.youtube.com/watch?v=arIOaHmvi9A&t=114s
NS-5000APの特徴(暫定) 2020,10/22更新
1 NS-5000のすべての機能が使えます。
マイクロステップ駆動、恒星時速度154pps
ステラナビゲータ、 SkySafari・・ASCOM対応
bluetooth / WiFiでスマホ、タブレットから無線自動導入
バックラッシュ補正機能を内蔵しています。
2 自動導入速度は、最高x160倍速まで可能です。
最高速は電源電圧で変化し、高いほど有利になります。
12Vでx120倍速、16Vでx160倍速出ました。
速度は赤道儀、モータ、望遠鏡の状態によって変化する場合があります。
3 電源は10~16Vまで有効、低消費電力です。
4 取付け方法
NS5000モータカバーと交換します。
赤緯体の電池は使いません。コネクタを外します。
基本的に赤道儀をお預かりしてお取付けする予定です。 |
NS-5000でAP赤道儀を動かしています。130倍速。
https://www.youtube.com/watch?v=arIOaHmvi9A&t=114s
NS-5000APの特徴(暫定) 2020,10/22更新
1 NS-5000のすべての機能が使えます。
マイクロステップ駆動、恒星時速度154pps
ステラナビゲータ、 SkySafari・・ASCOM対応
bluetooth / WiFiでスマホ、タブレットから無線自動導入
バックラッシュ補正機能を内蔵しています。
2 自動導入速度は、最高x160倍速まで可能です。
最高速は電源電圧で変化し、高いほど有利になります。
12Vでx120倍速、16Vでx160倍速出ました。
速度は赤道儀、モータ、望遠鏡の状態によって変化する場合があります。
3 電源は10~16Vまで有効、低消費電力です。
4 取付け方法
NS5000モータカバーと交換します。
赤緯体の電池は使いません。コネクタを外します。
基本的に赤道儀をお預かりしてお取付けする予定です。
https://www.youtube.com/watch?v=arIOaHmvi9A&t=114s
NS-5000APの特徴(暫定) 2020,10/22更新
1 NS-5000のすべての機能が使えます。
マイクロステップ駆動、恒星時速度154pps
ステラナビゲータ、 SkySafari・・ASCOM対応
bluetooth / WiFiでスマホ、タブレットから無線自動導入
バックラッシュ補正機能を内蔵しています。
2 自動導入速度は、最高x160倍速まで可能です。
最高速は電源電圧で変化し、高いほど有利になります。
12Vでx120倍速、16Vでx160倍速出ました。
速度は赤道儀、モータ、望遠鏡の状態によって変化する場合があります。
3 電源は10~16Vまで有効、低消費電力です。
4 取付け方法
NS5000モータカバーと交換します。
赤緯体の電池は使いません。コネクタを外します。
基本的に赤道儀をお預かりしてお取付けする予定です。
西岡定彦さんが近況アップデートを投稿しました。
お客様から以下のお問い合わせをいただきました。
2020/10/19
「NS-5000が動作中に以下のような動作をすることがあり、これについて
Q1これはどのような事(Beep音の意味)なのか?
Q2発生原因や対処方法として考えられることはないか?
動作の症状
1)ピーっという2秒程度以上の長めのBeep音がなる
2)以降、ピりっという1秒未満の短めのBeep音がつながったような音が8秒置き程度間隔をあけてなる」
以上については以下のメールで回答しています。
> 動作の症状
> 1)ピーっという2秒程度以上の長めのBeep音がなる
おそらく原因は分かりませんが、子午線警告音が有効になっていると思います。
2秒程度以上の長めのBeep音は望遠鏡の位置が子午線を通過した時に、警告として、ユーザーにBeep音で知らせています。
> 2)以降、ピりっという1秒未満の短めのBeep音がつながったような音が8秒置き程度間隔をあけてなる→この時の様子を動画で撮影しております。
ピりっという1秒未満の短めのBeep音は、東側から子午線を超えて、西側に望遠鏡が向いていますとの警告音ですね。
普通はあまり利用されていませんが、NS5000の安全機能の1つです。後でその止め方を調べてお知らせします。
NS5000はたくさんのコマンド、機能がありますので、調査中です。しばらくお待ち下さい。
2020/10/19
「NS-5000が動作中に以下のような動作をすることがあり、これについて
Q1これはどのような事(Beep音の意味)なのか?
Q2発生原因や対処方法として考えられることはないか?
動作の症状
1)ピーっという2秒程度以上の長めのBeep音がなる
2)以降、ピりっという1秒未満の短めのBeep音がつながったような音が8秒置き程度間隔をあけてなる」
以上については以下のメールで回答しています。
> 動作の症状
> 1)ピーっという2秒程度以上の長めのBeep音がなる
おそらく原因は分かりませんが、子午線警告音が有効になっていると思います。
2秒程度以上の長めのBeep音は望遠鏡の位置が子午線を通過した時に、警告として、ユーザーにBeep音で知らせています。
> 2)以降、ピりっという1秒未満の短めのBeep音がつながったような音が8秒置き程度間隔をあけてなる→この時の様子を動画で撮影しております。
ピりっという1秒未満の短めのBeep音は、東側から子午線を超えて、西側に望遠鏡が向いていますとの警告音ですね。
普通はあまり利用されていませんが、NS5000の安全機能の1つです。後でその止め方を調べてお知らせします。
NS5000はたくさんのコマンド、機能がありますので、調査中です。しばらくお待ち下さい。
 NS-5000APで最も肝心な部品が入荷しました。AP赤道儀のモータカバーです。これを加工してNS5000接続用コネクタを付けます |
NS-5000APで最も肝心な部品が入荷しました。AP赤道儀のモータカバーです。これを加工してNS5000接続用コネクタを付けます
 NS-5000APモータカバー基板はこんな感じになります。 |
NS-5000APモータカバー基板はこんな感じになります。
 旧アトラクス用NS-5000ATLUX、NS-5000GP(横浜市)のお問い合わせがあります。オプションとしてACアダプタ(24V)、bluetoothドングル、USB-RS232C変換ケーブルは入荷しました。アンフェノールコネクタは来週になる予定です。
他にNS-5000GP + bluetooth + LEDハンドボックスのお問い合わせがきました(新潟県)。ありがとうございます。
ほぼ準備できています、あとは組み立てです。 |
旧アトラクス用NS-5000ATLUX、NS-5000GP(横浜市)のお問い合わせがあります。オプションとしてACアダプタ(24V)、bluetoothドングル、USB-RS232C変換ケーブルは入荷しました。アンフェノールコネクタは来週になる予定です。
他にNS-5000GP + bluetooth + LEDハンドボックスのお問い合わせがきました(新潟県)。ありがとうございます。
ほぼ準備できています、あとは組み立てです。
他にNS-5000GP + bluetooth + LEDハンドボックスのお問い合わせがきました(新潟県)。ありがとうございます。
ほぼ準備できています、あとは組み立てです。
 NS-5000APモータカバーの基板10枚入荷しました。
基板10枚で、1枚に4個面付けしたので40個!になります、超激安です。
またお客様から、
2020,11/3「日本パルスモーターのステッピングモーター 定格12Vで抵抗値76Ωのバイポーラ仕様の物を ヤマトで送るので商品開発やテストとかで使ってください。」
ありがとうございます。モータ(MT-1用と互換性があります)は無事到着しました。
これでユニポーラ、バイポーラでのスピード差が大きい理由を調べたいと思います。 |
NS-5000APモータカバーの基板10枚入荷しました。
基板10枚で、1枚に4個面付けしたので40個!になります、超激安です。
またお客様から、
2020,11/3「日本パルスモーターのステッピングモーター 定格12Vで抵抗値76Ωのバイポーラ仕様の物を ヤマトで送るので商品開発やテストとかで使ってください。」
ありがとうございます。モータ(MT-1用と互換性があります)は無事到着しました。
これでユニポーラ、バイポーラでのスピード差が大きい理由を調べたいと思います。
基板10枚で、1枚に4個面付けしたので40個!になります、超激安です。
またお客様から、
2020,11/3「日本パルスモーターのステッピングモーター 定格12Vで抵抗値76Ωのバイポーラ仕様の物を ヤマトで送るので商品開発やテストとかで使ってください。」
ありがとうございます。モータ(MT-1用と互換性があります)は無事到着しました。
これでユニポーラ、バイポーラでのスピード差が大きい理由を調べたいと思います。
 AP赤道儀のモータカバー7個穴あけ加工しました。結構上手くできました。これがあればNS5000で自動導入できます。 |
AP赤道儀のモータカバー7個穴あけ加工しました。結構上手くできました。これがあればNS5000で自動導入できます。
 AP用モータカバー完成しました。
これでAP赤道儀用のDOG NS-5000APの開発は完了しました。 |
AP用モータカバー完成しました。
これでAP赤道儀用のDOG NS-5000APの開発は完了しました。
これでAP赤道儀用のDOG NS-5000APの開発は完了しました。
 今日は、大変お待たせの旧アトラクス用、GP用2台、そしてAP赤道儀用NS-5000を作っています。
明日は無理、明後日発送できそうです。 |
今日は、大変お待たせの旧アトラクス用、GP用2台、そしてAP赤道儀用NS-5000を作っています。
明日は無理、明後日発送できそうです。
明日は無理、明後日発送できそうです。
 お待たせしました、旧アトラクス+GP用(横浜市)、GP用(新潟県)、AP赤道儀用(札幌、アストロショップAU様)ができました。動作テストOKです。明日発送します。 |
お待たせしました、旧アトラクス+GP用(横浜市)、GP用(新潟県)、AP赤道儀用(札幌、アストロショップAU様)ができました。動作テストOKです。明日発送します。
 AP赤道儀用NS-5000APのご依頼を頂きました。(山梨県)
たった今、赤道儀は無事到着しました。 |
AP赤道儀用NS-5000APのご依頼を頂きました。(山梨県)
たった今、赤道儀は無事到着しました。
たった今、赤道儀は無事到着しました。
 パーツが到着しました。小物は多めで、基本的に10セット分そろえてます。 |
パーツが到着しました。小物は多めで、基本的に10セット分そろえてます。
 |  |  |
AP赤道儀をNS5000化に改造しました。赤緯体の電池を迂回するためのケーブル取付け、赤経モータカバー交換。動作テストOK、無事完了しました。
 |  |  |
NS-5000GPにbluetooth/WiFi取付、オーバーホールのご依頼がありました。
オーバーホールは、
電源スイッチ交換、
リアパネルにDサブコネクタ取付、
モータ接続ケーブルのコネクタ修復・・・
そのためにリアパネル、基板を交換します。
オーバーホールは、
電源スイッチ交換、
リアパネルにDサブコネクタ取付、
モータ接続ケーブルのコネクタ修復・・・
そのためにリアパネル、基板を交換します。
 ハンドボックス3台ほか製作しました。
左からNS-5000AP(山梨県)完成、明日発送予定です。NS-5000GP(オーバホール、神奈川県)、NS-5000GP(岩手県)。(それにAP用の試作機) |
ハンドボックス3台ほか製作しました。
左からNS-5000AP(山梨県)完成、明日発送予定です。NS-5000GP(オーバホール、神奈川県)、NS-5000GP(岩手県)。(それにAP用の試作機)
左からNS-5000AP(山梨県)完成、明日発送予定です。NS-5000GP(オーバホール、神奈川県)、NS-5000GP(岩手県)。(それにAP用の試作機)
 2台発送しました。左からNS-5000GP(岩手県)、NS-5000GPオーバーホール(神奈川県)です。ケースは少し違いますが中身は同じです。 |
2台発送しました。左からNS-5000GP(岩手県)、NS-5000GPオーバーホール(神奈川県)です。ケースは少し違いますが中身は同じです。
 |  |
NS-5000GP(北海道)ができました。これは先日のオーバーホールの基板を再利用しています。bluetooth内蔵。お客様はこれでDOGの最も初期のバージョンNS-2EM200(故障しました)の代わりにご利用されます。
 NS-5000 ESP32v1(bluetooth/WiFiアダプタ)5個作りました。CPUは新しいESP32-WROOM-32E(メモリ16MB)、書き込みOK、WiFi APを確認できました。シールド板に技適マーク無しですが認定品です。 |
NS-5000 ESP32v1(bluetooth/WiFiアダプタ)5個作りました。CPUは新しいESP32-WROOM-32E(メモリ16MB)、書き込みOK、WiFi APを確認できました。シールド板に技適マーク無しですが認定品です。
 たった今、お客様のAP赤道儀が無事到着しました。 |
たった今、お客様のAP赤道儀が無事到着しました。
 |  |  |
AP赤道儀をNS-5000AP用に改造しました。動作テストOKです。改造内容は、赤緯体に電池を迂回するケーブルと交換、赤経モータカバー交換の2点です。
今日は、NS-5000AP(静岡県)、NS-5000GP(鹿児島県)2台発送する予定です。
今日は、NS-5000AP(静岡県)、NS-5000GP(鹿児島県)2台発送する予定です。
 NS-5000AP 2台(鹿児島県、長野県)、NS-501GP 2台(スターベース東京様)製作しています。年内発送が目標です。
しかしケースが足らず、追加発注していますが納期の連絡が来ません・・。
右の小型NS-5000 基板は汎用の2相、5相モータドライバ用で、電源は3.3V、フォトカプラ・インターフェース用に5Vが別途必要です。オートガイド端子、RS232Cコネクタ付き。 |
NS-5000AP 2台(鹿児島県、長野県)、NS-501GP 2台(スターベース東京様)製作しています。年内発送が目標です。
しかしケースが足らず、追加発注していますが納期の連絡が来ません・・。
右の小型NS-5000 基板は汎用の2相、5相モータドライバ用で、電源は3.3V、フォトカプラ・インターフェース用に5Vが別途必要です。オートガイド端子、RS232Cコネクタ付き。
しかしケースが足らず、追加発注していますが納期の連絡が来ません・・。
右の小型NS-5000 基板は汎用の2相、5相モータドライバ用で、電源は3.3V、フォトカプラ・インターフェース用に5Vが別途必要です。オートガイド端子、RS232Cコネクタ付き。
 |  |
AP赤道儀と追加パーツが無事到着しました。NS5000ケースは順調にいけば明後日になる見込みです。
新しいESP32-WROOM-32Eを試したら正常に動いたので10個注文です。
新しいESP32-WROOM-32Eを試したら正常に動いたので10個注文です。
 AP赤道儀がもう一台(長野県)到着しました。後で2台まとめてNS5000用に改造します。ケースは明日入荷予定で、すぐに本体ケース、ハンドボックス加工、組み込みを行います。25、26日発送する予定です。 |
AP赤道儀がもう一台(長野県)到着しました。後で2台まとめてNS5000用に改造します。ケースは明日入荷予定で、すぐに本体ケース、ハンドボックス加工、組み込みを行います。25、26日発送する予定です。
 |  |
午前にケースが到着して、5セット分加工を始めたのですが、夕方までかかりました。少々くたびれました。明日は朝から組み立て作業をやります。目標はNS-5000 4台完成、クリスマス発送。
 |  |
NS-5000 4セット出来ました。駆動、bluetooth/WiFiテストOKです。あとハンドボックスのコネクタはんだ付け4ヶ所残していますが、それは明日にして今日はクリスマス・イブ、ごちそうを食べました。明日発送します。
 AP赤道儀2台改造しました。NS-5000APで赤経、赤緯モータは正常に動きました。
これでAP赤道儀はNS-5000により自動導入できます。本日発送します。 |
AP赤道儀2台改造しました。NS-5000APで赤経、赤緯モータは正常に動きました。
これでAP赤道儀はNS-5000により自動導入できます。本日発送します。
これでAP赤道儀はNS-5000により自動導入できます。本日発送します。
 明けましておめでとうございます。
今年もよろしくお願いします。
昨夜釧路は大雪になりました。
除雪中です。 |
明けましておめでとうございます。
今年もよろしくお願いします。
昨夜釧路は大雪になりました。
除雪中です。
今年もよろしくお願いします。
昨夜釧路は大雪になりました。
除雪中です。
 |  |
昨年末よりお問い合わせがあり(清原光学様)、3軸XYZコントローラを製作することになりました。これは2014年の6軸コントローラと同じもので、6年ぶりのリピートになります。実に嬉しいです。サイトに関連記事があります。(2014,3/4) (2014,3/9)
http://nskikaku.sakura.ne.jp/NS2014/ns2014.html
実際の用途は知りませんが、XYZステージの手動操作の代わりとしてDCモータを付け、パソコンのテンキーからステップコントロールします。ネットを調べるとXYZステージは基本モデルが手動、高級品は5相モータ・・ありますが、これはギアードDCモータで、おそらく珍しいと思われます。
清原光学様には他に以下の仕事でお世話になりました。
横浜こども科学館太陽望遠鏡システム
http://nskikaku.sakura.ne.jp/yokohama/yokohama.htm
トラッキングミラーシステム
50cm x 50cm?の平面鏡+フォーク式経緯台を自動導入
http://nskikaku.sakura.ne.jp/NS2014/ns2014.html
実際の用途は知りませんが、XYZステージの手動操作の代わりとしてDCモータを付け、パソコンのテンキーからステップコントロールします。ネットを調べるとXYZステージは基本モデルが手動、高級品は5相モータ・・ありますが、これはギアードDCモータで、おそらく珍しいと思われます。
清原光学様には他に以下の仕事でお世話になりました。
横浜こども科学館太陽望遠鏡システム
http://nskikaku.sakura.ne.jp/yokohama/yokohama.htm
トラッキングミラーシステム
50cm x 50cm?の平面鏡+フォーク式経緯台を自動導入
 3軸XYZコントローラはこんな感じになります。小型のNS5000 CPUボードを利用しています。これはNS5000のシステム環境(プログラミングに必要な道具が一通り製作済)をベースにしたので開発期間を短縮できました。コマンドの書式はNS5000とまったく同じです。 |
3軸XYZコントローラはこんな感じになります。小型のNS5000 CPUボードを利用しています。これはNS5000のシステム環境(プログラミングに必要な道具が一通り製作済)をベースにしたので開発期間を短縮できました。コマンドの書式はNS5000とまったく同じです。
 3軸XYZコントローラは、配線、DCモータつないで、PCからコントロールできました。あとはケースに組込ですが、月末の納期は大丈夫です。 |
3軸XYZコントローラは、配線、DCモータつないで、PCからコントロールできました。あとはケースに組込ですが、月末の納期は大丈夫です。
 3軸XYZコントローラは無事動きました。2,3日したら発送しますが、先日お問い合わせいただいていたNS-402TEMMA Bluetooth/WiFiアダプタ2台(スターベース東京様、12500円)が遅れています。近々に製作、発送します。 |
3軸XYZコントローラは無事動きました。2,3日したら発送しますが、先日お問い合わせいただいていたNS-402TEMMA Bluetooth/WiFiアダプタ2台(スターベース東京様、12500円)が遅れています。近々に製作、発送します。
 |  |
NS-402TEMMA Bluetooth/WiFiアダプタ2台(スターベース東京様)完成しました。3軸XYZコントローラと発送します。
NS-402TEMMAは、TEMMA,TEMMA2,TEMMA3のどれにも対応いたします。ご利用中のRS232CケーブルをNS-402に接続し、モバイルバッテリをつなぐと、LEDがチカチカしてから点灯します。
これで準備完了です。
ご希望のbluetoothまたはWiFiにて、PC 、タブレット、スマホ、iPad・・からステラナビ、SkySafari・・から自動導入してください。
RS232Cですが、他のほぼ全部の自動導入機(例NS5000,PC2000,LX200・・)は同じ仕様ですが、TEMMAだけはオリジナルのRS232Cプロトコルを採用しています。
■bluetooth / WiFi 接続方法
bluetoothは検索すると、NS402BTが見つかりますので、ペアリングすると自動的に接続します。
PCの場合はCOM番号が割り当てられその番号でステラナビ・・に接続、自動導入できます。
また、Androidはペアリング後、アプリ SkySafari Plus(Pro)からbluetoothで自動導入できます。
以下を参考にしてください。
「NS-5000 Androidタブレット、スマートフォン接続方法」
http://nskikaku.sakura.ne.jp/download/download.html
WiFiはたとえばAndroidで検索すると、NS402WiFi が見つかります。パスワード ns402wifi (半角英数字小文字ですね)で接続できます。
SkySafari 側の設定は、(添付写真)
Scope Type -Takahashi Temma2 を選択するといいでしょう。
IP Address 192.168.5.5
Port Number 500
一度設定すれば、あとは自動的に接続されるようになります。
NS-402TEMMAは、TEMMA,TEMMA2,TEMMA3のどれにも対応いたします。ご利用中のRS232CケーブルをNS-402に接続し、モバイルバッテリをつなぐと、LEDがチカチカしてから点灯します。
これで準備完了です。
ご希望のbluetoothまたはWiFiにて、PC 、タブレット、スマホ、iPad・・からステラナビ、SkySafari・・から自動導入してください。
RS232Cですが、他のほぼ全部の自動導入機(例NS5000,PC2000,LX200・・)は同じ仕様ですが、TEMMAだけはオリジナルのRS232Cプロトコルを採用しています。
■bluetooth / WiFi 接続方法
bluetoothは検索すると、NS402BTが見つかりますので、ペアリングすると自動的に接続します。
PCの場合はCOM番号が割り当てられその番号でステラナビ・・に接続、自動導入できます。
また、Androidはペアリング後、アプリ SkySafari Plus(Pro)からbluetoothで自動導入できます。
以下を参考にしてください。
「NS-5000 Androidタブレット、スマートフォン接続方法」
http://nskikaku.sakura.ne.jp/download/download.html
WiFiはたとえばAndroidで検索すると、NS402WiFi が見つかります。パスワード ns402wifi (半角英数字小文字ですね)で接続できます。
SkySafari 側の設定は、(添付写真)
Scope Type -Takahashi Temma2 を選択するといいでしょう。
IP Address 192.168.5.5
Port Number 500
一度設定すれば、あとは自動的に接続されるようになります。
 |  |
Raspberry Piというマイコンがありますが、試しに小型のRaspberry Pi Zero Wを動かしてみました。。ちゃんとTVにdisktop画面が出てきました。小さな基板ですがちょっとしたノートPCなみのパワーがあります。
Raspberry Pi Zero W
CPU 1 GHz 512MB RAM
WiFi ,Bluetooth, Bluetooth BLE
USB 、miniHDMI 、コンポジットビデオ信号(映像出力)
microSDメモリーカード
やろうと思えばNS5000に内蔵できますが、乗せるだけの意味があるでしょうか?USBキーボード、マウス、モニタにつなげばパソコン(Linux系)になり、星図アプリCartes du Cielが走るらしい?ので自動導入可能、オートガイドアプリは?ブラウザはインストール済で即インターネット可能です。
Raspberry Pi Zero W
CPU 1 GHz 512MB RAM
WiFi ,Bluetooth, Bluetooth BLE
USB 、miniHDMI 、コンポジットビデオ信号(映像出力)
microSDメモリーカード
やろうと思えばNS5000に内蔵できますが、乗せるだけの意味があるでしょうか?USBキーボード、マウス、モニタにつなげばパソコン(Linux系)になり、星図アプリCartes du Cielが走るらしい?ので自動導入可能、オートガイドアプリは?ブラウザはインストール済で即インターネット可能です。
 去年から気にしていた経緯台コントロールについて考えています。経緯台から天体を恒星時追尾する為には方位、高度の両軸制御が必要です。しかしどうすればいいのか?分からないでいましたが、天体の動きをベクトルで近似して、方位、高度の2軸に分解すれば、出来そうな気がしてきました。 |
去年から気にしていた経緯台コントロールについて考えています。経緯台から天体を恒星時追尾する為には方位、高度の両軸制御が必要です。しかしどうすればいいのか?分からないでいましたが、天体の動きをベクトルで近似して、方位、高度の2軸に分解すれば、出来そうな気がしてきました。
 |  |
経緯台システムは検討を進めています。
概要を検討中です。
概要を検討中です。
 経緯台システム(NS5000AZ)を検討中です。まだプログラミングはぜんぜん無理です。概要設計の段階です。プログラムはかなりの分量がありそうですが経験的になんとかなるレベルだと思います。頭の中では少し経緯台の動くイメージが出来つつあります。 |
経緯台システム(NS5000AZ)を検討中です。まだプログラミングはぜんぜん無理です。概要設計の段階です。プログラムはかなりの分量がありそうですが経験的になんとかなるレベルだと思います。頭の中では少し経緯台の動くイメージが出来つつあります。
 経緯台システム(NS5000AZ)検討中。少し前進です。座標系の区別と関係がだいぶはっきりしてきました。まとまりが出てきたと思います。システムは3つのグループに分けて組み立てます。全体の初期化(Inz)の部分、表(Frontend)の接続、アライメント、自動導入、そして裏方(Backend)の座標計算、恒星時追尾の3つです。 |
経緯台システム(NS5000AZ)検討中。少し前進です。座標系の区別と関係がだいぶはっきりしてきました。まとまりが出てきたと思います。システムは3つのグループに分けて組み立てます。全体の初期化(Inz)の部分、表(Frontend)の接続、アライメント、自動導入、そして裏方(Backend)の座標計算、恒星時追尾の3つです。
 経緯台の方位、高度から赤経、赤緯までの手順がまだまだ不明瞭な感じがあります。少し具体的な通信方法?を検討をしました。 |
経緯台の方位、高度から赤経、赤緯までの手順がまだまだ不明瞭な感じがあります。少し具体的な通信方法?を検討をしました。
 8日(月曜)自作フォーク式赤道儀にNS5000を接続して無事動きました。
設置作業は群馬の工場が行いました、お客様は「チロ60cmフォーク式赤道儀」を製作されておられます。
http://nskikaku.sakura.ne.jp/NS2013/ns2013.html
駆動系はDCサーボモータでインターフェースのために、
工場の方でPLS/DIR1パルス方式をロジックICでCW/CCW2パルス方式に変換しています。
赤道儀の写真が届いていますのでご紹介します。
赤道儀は、お客様自作の片持フォーク式赤道儀です。
写真のドームも自作されています。
鏡筒は30cmニュートン、25cmシュミカセ、15cm/F15アクロマート
2021,2/9工場からメールをいただきました。
「昨晩 恒星時、自動導入、ガイド撮影のテストをして問題なく動いているとの事です。フォーク式の動きは子午線を跨いでも反転動作しませんので実際に動かしてみると良い感じです。」 |
8日(月曜)自作フォーク式赤道儀にNS5000を接続して無事動きました。
設置作業は群馬の工場が行いました、お客様は「チロ60cmフォーク式赤道儀」を製作されておられます。
http://nskikaku.sakura.ne.jp/NS2013/ns2013.html
駆動系はDCサーボモータでインターフェースのために、
工場の方でPLS/DIR1パルス方式をロジックICでCW/CCW2パルス方式に変換しています。
赤道儀の写真が届いていますのでご紹介します。
赤道儀は、お客様自作の片持フォーク式赤道儀です。
写真のドームも自作されています。
鏡筒は30cmニュートン、25cmシュミカセ、15cm/F15アクロマート
2021,2/9工場からメールをいただきました。
「昨晩 恒星時、自動導入、ガイド撮影のテストをして問題なく動いているとの事です。フォーク式の動きは子午線を跨いでも反転動作しませんので実際に動かしてみると良い感じです。」
設置作業は群馬の工場が行いました、お客様は「チロ60cmフォーク式赤道儀」を製作されておられます。
http://nskikaku.sakura.ne.jp/NS2013/ns2013.html
駆動系はDCサーボモータでインターフェースのために、
工場の方でPLS/DIR1パルス方式をロジックICでCW/CCW2パルス方式に変換しています。
赤道儀の写真が届いていますのでご紹介します。
赤道儀は、お客様自作の片持フォーク式赤道儀です。
写真のドームも自作されています。
鏡筒は30cmニュートン、25cmシュミカセ、15cm/F15アクロマート
2021,2/9工場からメールをいただきました。
「昨晩 恒星時、自動導入、ガイド撮影のテストをして問題なく動いているとの事です。フォーク式の動きは子午線を跨いでも反転動作しませんので実際に動かしてみると良い感じです。」
 経緯台はアライメントについて基本設計ができたと思います。すっきり分かりやすくなりました。
星図アプリでアライメントを取る他にアライメントスイッチを考えました。例えば望遠鏡を真南に向けてアライメントスイッチを押すと同期は完了し、自動導入が出来るようになります。赤道儀に比べ、経緯台の場合は真南に向けるのは難しくありません。据え置き型の経緯台では便利だと思います。 |
経緯台はアライメントについて基本設計ができたと思います。すっきり分かりやすくなりました。
星図アプリでアライメントを取る他にアライメントスイッチを考えました。例えば望遠鏡を真南に向けてアライメントスイッチを押すと同期は完了し、自動導入が出来るようになります。赤道儀に比べ、経緯台の場合は真南に向けるのは難しくありません。据え置き型の経緯台では便利だと思います。
星図アプリでアライメントを取る他にアライメントスイッチを考えました。例えば望遠鏡を真南に向けてアライメントスイッチを押すと同期は完了し、自動導入が出来るようになります。赤道儀に比べ、経緯台の場合は真南に向けるのは難しくありません。据え置き型の経緯台では便利だと思います。
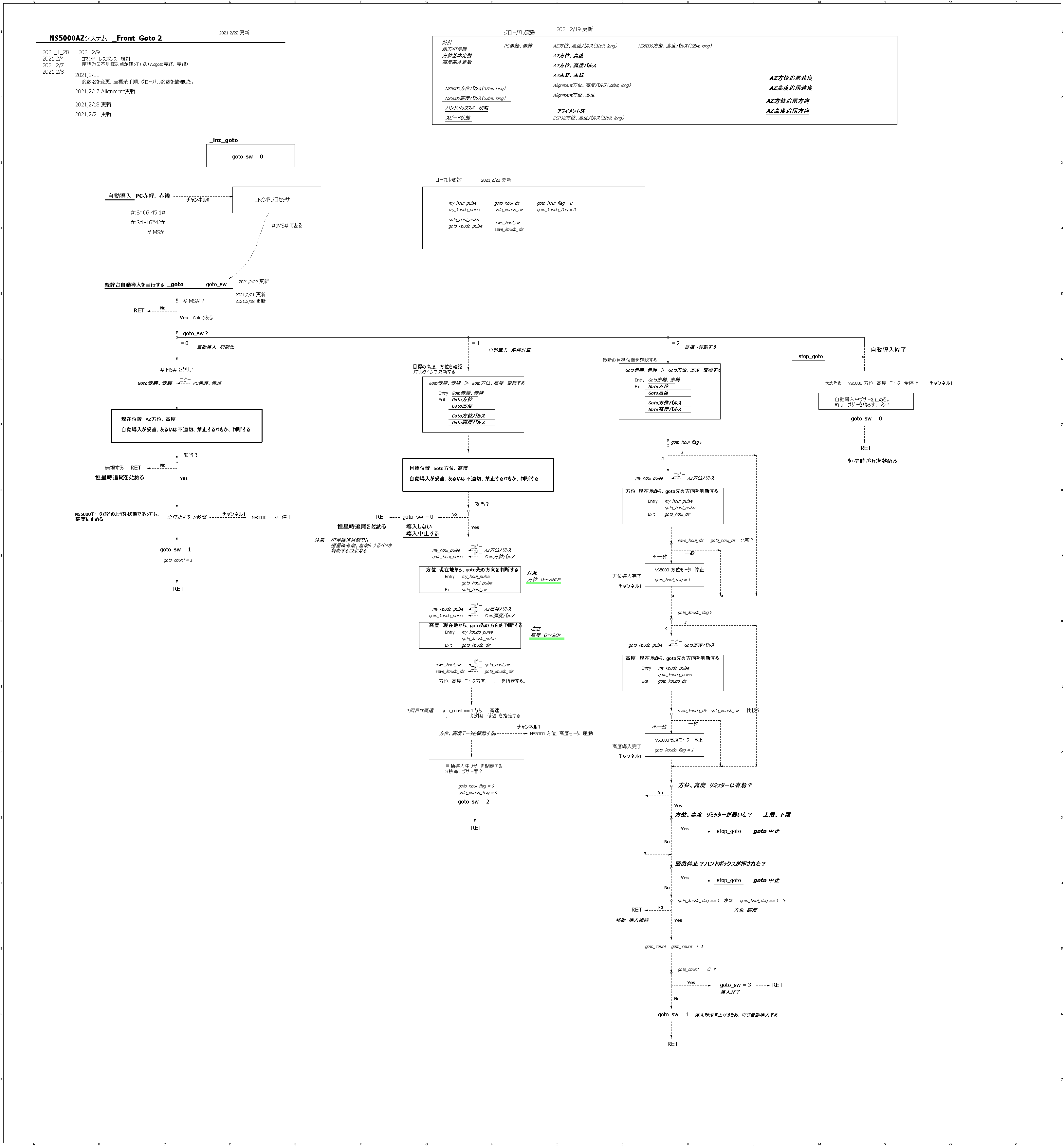{kind=link}
経緯台、自動導入の基本設計が順調です。こんな感じで組み立てています。http://nskikaku.sakura.ne.jp/download/azsystem_Front%20%20_Goto2.png
更新済
訂正
更新済
訂正
2021/02/22 19:08に更新
 経緯台の 高度、観測、導入、恒星時追尾の範囲を検討中です。方位は特にありませんが、高度についてはいろいろ課題があります。
小型経緯台はシンプル、大型は特に安全対策を考えてシステムを検討しています。 |
経緯台の 高度、観測、導入、恒星時追尾の範囲を検討中です。方位は特にありませんが、高度についてはいろいろ課題があります。
小型経緯台はシンプル、大型は特に安全対策を考えてシステムを検討しています。
小型経緯台はシンプル、大型は特に安全対策を考えてシステムを検討しています。
 仮に、経緯台の操作パネルをPCに作るとして、何があるか検討してます。ご意見ありましたらお願いします。 |
仮に、経緯台の操作パネルをPCに作るとして、何があるか検討してます。ご意見ありましたらお願いします。
 |  |
本日到着したケースと特製ハンドボックスです。今お問い合わせがあり、まだ検討中の段階なのに、カバー付きハンドボックスを注文してしまいました。いい感じですが・・
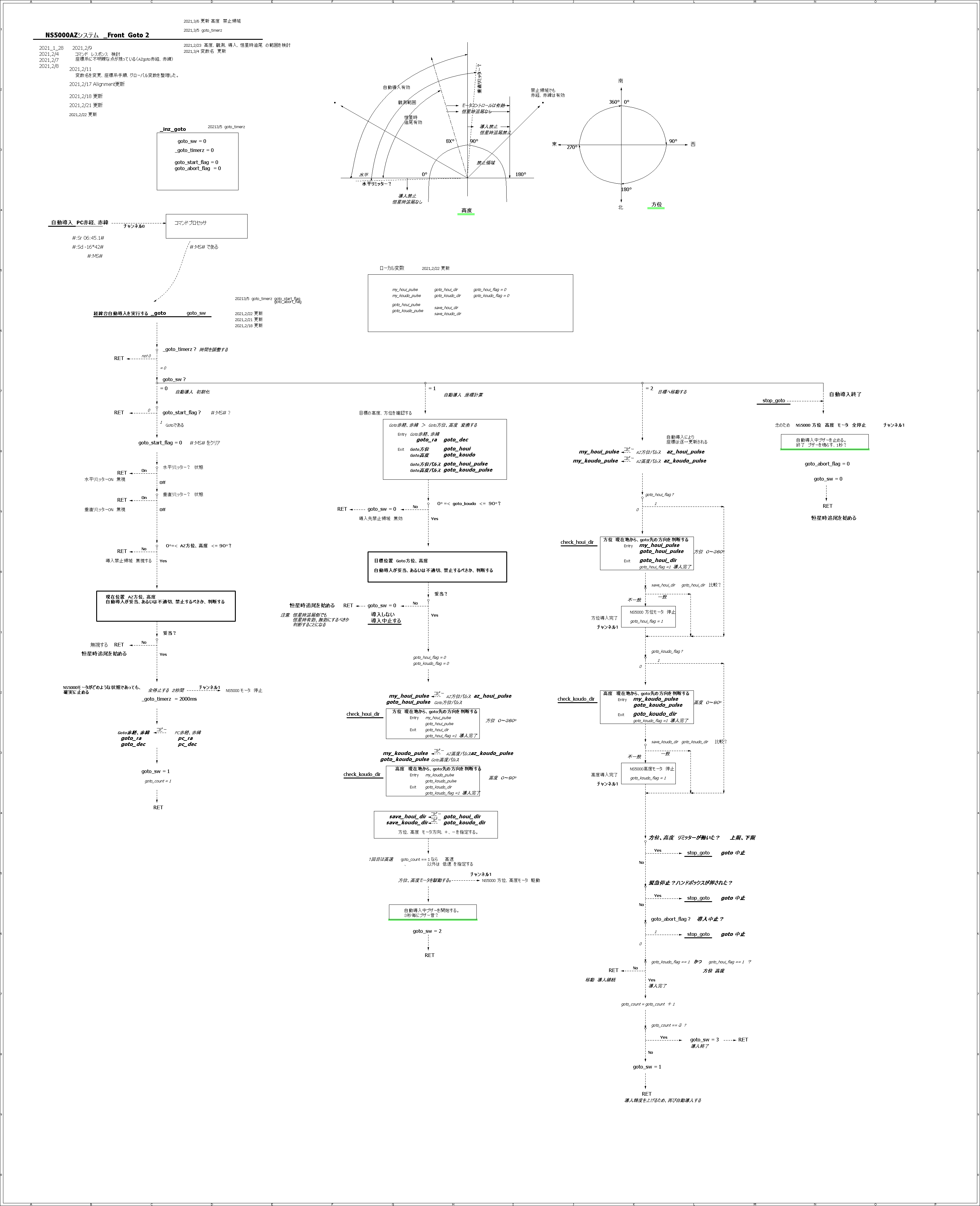{kind=link}
経緯台システムは5つのブロックに分けて検討しています。初期化(+バックエンド)、通信プロトコル、アライメント、自動導入、恒星時追尾、けっこう順調です。自動導入はかなり出来上がってきまして、早速プログラミングできそうな感じですが、まだまだ、もう暫く考えます。
それから有り難いことに大型の仕事が入りました、それをやりながら作業します。
http://nskikaku.sakura.ne.jp/download/azsystem_Front%20%20_Goto2_2021_3_7.png
それから有り難いことに大型の仕事が入りました、それをやりながら作業します。
http://nskikaku.sakura.ne.jp/download/azsystem_Front%20%20_Goto2_2021_3_7.png
2021/03/07 20:22に更新
 大型用ハンドボックスを作りました。ネイビーブルーのシリコンプロテクター付です。 |
大型用ハンドボックスを作りました。ネイビーブルーのシリコンプロテクター付です。
 荷物は無事到着しました。大型用モータユニット、もう一箱あります。 |
荷物は無事到着しました。大型用モータユニット、もう一箱あります。
 |  |
中央光学赤道儀用NS-5000を製作しています。赤道儀用パネルを製作しました。配線はあと少し、明日5相ドライバでテスト出来る見込みです。もう一つペンタックスMS-5用NS-5000MS5を作ります。これもパネルを製作して純正パネルと交換します。(どちらも、札幌 アストロショップAU様)
 |  |  |
MS5用パネルに部品をならべてみました。いい感じです。一部極軸ランプのところが空いています。ボリュームに1箇所穴あけします。配線は夕方から始める予定です。
 中央光学赤道儀のパネル用、ハンドボックス・コネクタ取付完了しました。 |
中央光学赤道儀のパネル用、ハンドボックス・コネクタ取付完了しました。
 中央光学赤道儀用NS-5000、モータドライバ(AC100V)をつないでテストしました。無事、赤経、赤緯とも動きました。モータは5相、PKE566BC-PS10、非常に強力なモータですが、恒星時追尾はほぼ無音です。明日パネルを付けて確認すればハードの方はOK、あとは初期化データを作り初期化すれば完了です。 |
中央光学赤道儀用NS-5000、モータドライバ(AC100V)をつないでテストしました。無事、赤経、赤緯とも動きました。モータは5相、PKE566BC-PS10、非常に強力なモータですが、恒星時追尾はほぼ無音です。明日パネルを付けて確認すればハードの方はOK、あとは初期化データを作り初期化すれば完了です。
 中央光学用NS-5000はパネルを付け動作を確認しました。またモータを動かしながら、パラメータの調整、初期化しました。
最高速はx970脱調していません。計算上ではx1000以上?ですが、赤道儀の状態によりますので、結果が楽しみです。
赤経モータの運転電流は定格の80%(発熱対策)赤緯は停止時カレントダウン50%にしました。
また安全対策としてNS5000を放置すると、自動的に1時間後恒星時追尾を停止するように設定しました。
#:=DT# = 0# 0:shutdown機能 無効 1:1時間 2:2時間 3:3時間 |
中央光学用NS-5000はパネルを付け動作を確認しました。またモータを動かしながら、パラメータの調整、初期化しました。
最高速はx970脱調していません。計算上ではx1000以上?ですが、赤道儀の状態によりますので、結果が楽しみです。
赤経モータの運転電流は定格の80%(発熱対策)赤緯は停止時カレントダウン50%にしました。
また安全対策としてNS5000を放置すると、自動的に1時間後恒星時追尾を停止するように設定しました。
#:=DT# = 0# 0:shutdown機能 無効 1:1時間 2:2時間 3:3時間
最高速はx970脱調していません。計算上ではx1000以上?ですが、赤道儀の状態によりますので、結果が楽しみです。
赤経モータの運転電流は定格の80%(発熱対策)赤緯は停止時カレントダウン50%にしました。
また安全対策としてNS5000を放置すると、自動的に1時間後恒星時追尾を停止するように設定しました。
#:=DT# = 0# 0:shutdown機能 無効 1:1時間 2:2時間 3:3時間
 中央光学用NS-5000は発送しました。近日取付けられます。
それからNS-5000MS5の方は写真の様な状態です。NS5000は赤道儀本体に内蔵します。お客様のご希望から年度内に納品、取付完了する必要があります。明日組み立てを終わらせる予定です。 |
中央光学用NS-5000は発送しました。近日取付けられます。
それからNS-5000MS5の方は写真の様な状態です。NS5000は赤道儀本体に内蔵します。お客様のご希望から年度内に納品、取付完了する必要があります。明日組み立てを終わらせる予定です。
それからNS-5000MS5の方は写真の様な状態です。NS5000は赤道儀本体に内蔵します。お客様のご希望から年度内に納品、取付完了する必要があります。明日組み立てを終わらせる予定です。
 今NS-5000MS5のパネル製作中です。ここで一度モータ駆動を確認します。それから赤経、赤緯モータ関係を配線して完了します。 |
今NS-5000MS5のパネル製作中です。ここで一度モータ駆動を確認します。それから赤経、赤緯モータ関係を配線して完了します。
 NS-5000MS5パネル、NS5000組込み、初期化が完了しました。恒星時速度は374pps、MS5純正モータ、1/16マイクロステップです。今日発送します。 |
NS-5000MS5パネル、NS5000組込み、初期化が完了しました。恒星時速度は374pps、MS5純正モータ、1/16マイクロステップです。今日発送します。
 NS-5000ATLUX(旧アトラクス、山口県)に極軸ライト調整用ボリュームを取付けました。今日発送しました。 |
NS-5000ATLUX(旧アトラクス、山口県)に極軸ライト調整用ボリュームを取付けました。今日発送しました。
 |  |
特製の初代アトラクスのNS-5000化についてお問い合わせを頂いています。
赤道儀のカバーを外して中を確かめました。
コントローラはAGS-1(K-ASTEC様)、モータは純正からPK264-03Aに換装されています。PK264は3A(アンペア)モータです。
赤道儀のカバーを外して中を確かめました。
コントローラはAGS-1(K-ASTEC様)、モータは純正からPK264-03Aに換装されています。PK264は3A(アンペア)モータです。
 NS-5000ATLUX/USD(福島県)をバージョンアップ、コネクタ、ネジ、LEDをチェックしました。
これはスイッチでATLUX(初代)、EM200USDどちらにも対応します。現状はUSDになっており、マイクロステップ、恒星時401pps、そしてRS232C 2チャンネルあります。日曜ですが今日返送します。 |
NS-5000ATLUX/USD(福島県)をバージョンアップ、コネクタ、ネジ、LEDをチェックしました。
これはスイッチでATLUX(初代)、EM200USDどちらにも対応します。現状はUSDになっており、マイクロステップ、恒星時401pps、そしてRS232C 2チャンネルあります。日曜ですが今日返送します。
これはスイッチでATLUX(初代)、EM200USDどちらにも対応します。現状はUSDになっており、マイクロステップ、恒星時401pps、そしてRS232C 2チャンネルあります。日曜ですが今日返送します。
MARK-X赤道儀用のNS-5000について、お問い合わせがきました。赤道儀、モータ、減速比等について調べました。
http://gototelesco.co.jp/md_for_mx.html
1 モータですが1.8°/step,ユニポーラ仕様をバイポーラで動かしています。DIN 5pコネクタ。
2 カタログによれば電源12Vで60倍速出るようです。
3 恒星時 48.33pps
4 モータstep数(360/1.8)、中間減速ギア比、ウオーム(126枚)、恒星時48.33ppsは以下の関係があります。
これによりマイクロステップ数Mを求めました。
モータ側ギア 18枚
中間ギア 2個重ねて
62枚(モータ側)
20枚(ウオーム側)
ウオーム側ギア 60枚
ウオームホイール 126枚
( 200 x M x (62/18) x (60/20)x 126 ) / 86164 = 48.33
M = 16
http://gototelesco.co.jp/md_for_mx.html
1 モータですが1.8°/step,ユニポーラ仕様をバイポーラで動かしています。DIN 5pコネクタ。
2 カタログによれば電源12Vで60倍速出るようです。
3 恒星時 48.33pps
4 モータstep数(360/1.8)、中間減速ギア比、ウオーム(126枚)、恒星時48.33ppsは以下の関係があります。
これによりマイクロステップ数Mを求めました。
モータ側ギア 18枚
中間ギア 2個重ねて
62枚(モータ側)
20枚(ウオーム側)
ウオーム側ギア 60枚
ウオームホイール 126枚
( 200 x M x (62/18) x (60/20)x 126 ) / 86164 = 48.33
M = 16
2021/06/01 16:49に更新
 お問い合わせいただいていますMARK-Xと初代アトラクス用(モータPK264A3に換装、アストロショプAU様)、そしてもう一台初代アトラクス用の製作準備が整いました。明日組み立てに入ります。 |
お問い合わせいただいていますMARK-Xと初代アトラクス用(モータPK264A3に換装、アストロショプAU様)、そしてもう一台初代アトラクス用の製作準備が整いました。明日組み立てに入ります。
 MARK-X、初代アトラクス用(PK264A3に換装)ここまでできました。本日完了が目標です。基板は中国から無事到着です。 |
MARK-X、初代アトラクス用(PK264A3に換装)ここまでできました。本日完了が目標です。基板は中国から無事到着です。
 MARK-X、初代アトラクス用(PK264A3に換装)完了です。動作全部OK、高速駆動を確認しました。
NS-5000PK264ATLUX
先日テストした結果では、(NS-5000は別機種で)
電源24V RA x320 DEC x360
電源12V RA x210 DEC x260
でしたが、今回もだいたい同じ結果でした。
NS-5000MARK-X
MARK-Xと異なるモータでしたが、かるくx50以上出ました。バイポーラ、サイレントマイクロステップ駆動です。実際のパフォーマンスは実機で確認することになります。最高x150にしました。
それから試しに、設定を変えて、初代アトラクス(PK264A3に換装)をNS-5000MARK-Xでサイレントマイクロステップ駆動してみました。
設定、初期化データはNS-5000PK264ATLUXをそのまま流用。
大電流モータ3A(アンペア)なので、控えめの2Aで駆動したところ、赤緯はx260で軽快に動きました。
しかし赤経の方ですがx100で脱調しました。
脱調時の音、変化の様子からトルクがまるで出ていない様に見えます、何か見落とししていたのか?、ひとまずそこで打ち切りました。
赤緯が普通に動いていますので赤経もある程度は動くと予想できるはずですが、今後の課題です。 |
MARK-X、初代アトラクス用(PK264A3に換装)完了です。動作全部OK、高速駆動を確認しました。
NS-5000PK264ATLUX
先日テストした結果では、(NS-5000は別機種で)
電源24V RA x320 DEC x360
電源12V RA x210 DEC x260
でしたが、今回もだいたい同じ結果でした。
NS-5000MARK-X
MARK-Xと異なるモータでしたが、かるくx50以上出ました。バイポーラ、サイレントマイクロステップ駆動です。実際のパフォーマンスは実機で確認することになります。最高x150にしました。
それから試しに、設定を変えて、初代アトラクス(PK264A3に換装)をNS-5000MARK-Xでサイレントマイクロステップ駆動してみました。
設定、初期化データはNS-5000PK264ATLUXをそのまま流用。
大電流モータ3A(アンペア)なので、控えめの2Aで駆動したところ、赤緯はx260で軽快に動きました。
しかし赤経の方ですがx100で脱調しました。
脱調時の音、変化の様子からトルクがまるで出ていない様に見えます、何か見落とししていたのか?、ひとまずそこで打ち切りました。
赤緯が普通に動いていますので赤経もある程度は動くと予想できるはずですが、今後の課題です。
NS-5000PK264ATLUX
先日テストした結果では、(NS-5000は別機種で)
電源24V RA x320 DEC x360
電源12V RA x210 DEC x260
でしたが、今回もだいたい同じ結果でした。
NS-5000MARK-X
MARK-Xと異なるモータでしたが、かるくx50以上出ました。バイポーラ、サイレントマイクロステップ駆動です。実際のパフォーマンスは実機で確認することになります。最高x150にしました。
それから試しに、設定を変えて、初代アトラクス(PK264A3に換装)をNS-5000MARK-Xでサイレントマイクロステップ駆動してみました。
設定、初期化データはNS-5000PK264ATLUXをそのまま流用。
大電流モータ3A(アンペア)なので、控えめの2Aで駆動したところ、赤緯はx260で軽快に動きました。
しかし赤経の方ですがx100で脱調しました。
脱調時の音、変化の様子からトルクがまるで出ていない様に見えます、何か見落とししていたのか?、ひとまずそこで打ち切りました。
赤緯が普通に動いていますので赤経もある程度は動くと予想できるはずですが、今後の課題です。
 今日MARK-X、初代アトラクス用(PK264A3に換装、アストロショップAU様)発送します。 |
今日MARK-X、初代アトラクス用(PK264A3に換装、アストロショップAU様)発送します。
 |  |
基板3枚作りました。その内2枚はミカゲ260用。2012年基板の状態で納品(岩手県)したNS-5000ですが、
「以前購入させていただきました基板のおかげでMIKAGE260を最大限有効に活用しておりましたが、不注意から基板を破損してしまいました、ドライバーICとCPUが破損しておりその他にも破損個所があるかもしれません。」
ということで、念の為の予備を入れて2枚お問い合わせいただきました。
「以前購入させていただきました基板のおかげでMIKAGE260を最大限有効に活用しておりましたが、不注意から基板を破損してしまいました、ドライバーICとCPUが破損しておりその他にも破損個所があるかもしれません。」
ということで、念の為の予備を入れて2枚お問い合わせいただきました。
 |  |  |  |  |
先週からパーツ、ケーブル、基板(bluetooth/wifi)、ドライバICが入荷しています。ケーブルは購入する度にかなり値上がりしてます。
それからNS-501GP 2セット(スターベース東京様)発送しました。
それからNS-501GP 2セット(スターベース東京様)発送しました。
 |  |
本日は、NS-5000APを発送しました。(神奈川県、秦野市)
オプションは、
LEDハンドボックス、
bluetooth/wifi、
USB--RS232C変換ケーブル、
RS232C延長ケーブル3m、
AC100V--DC16V 電源器
オプションは、
LEDハンドボックス、
bluetooth/wifi、
USB--RS232C変換ケーブル、
RS232C延長ケーブル3m、
AC100V--DC16V 電源器