1章 概説
- DOG NSシリーズについて
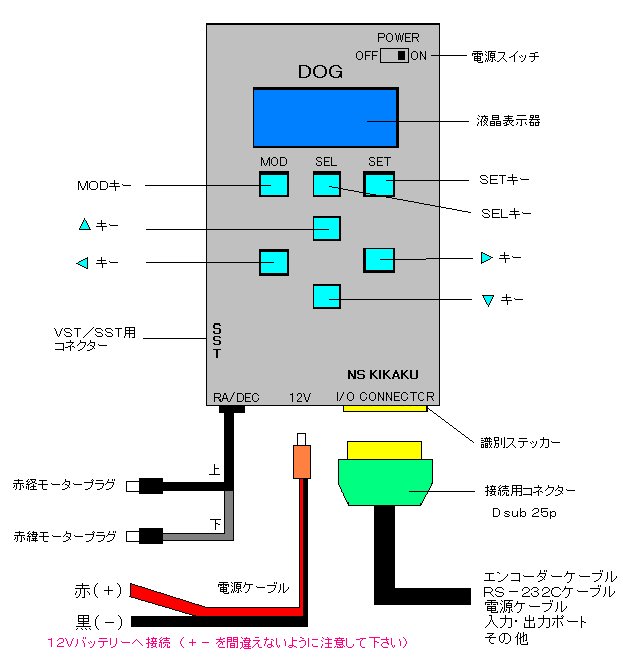
- 外観と名称
- 使用上の注意
- 電源スイッチを入れるまでの手順
2章 DOG
- 動作モードとキー操作につ いて
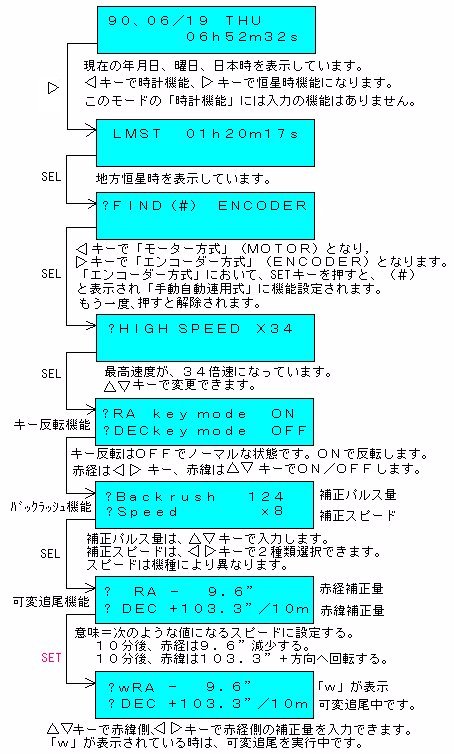
- 時計モード
- 経度、緯度モード
- コントローラモード
- 天体導入モード
- 初期設定モード
- データモード
- 可変追尾(メトカーフ)に ついて
- バックラッシュについて
- 導入精度について
- M/R天体に ついて
3章 通信機能
- リモート・コ ントロール・モードについて
- RS- 232Cケーブル通信条件
- シーケンス テーブルの見方
- リモート・コ ントロール・モードへの移行
- 赤経コマンド
- 赤緯コマンド
- エラー発生に ついて
- モニターコマ ンド
- リードコマン ド
- ライトコマン ド
- リモートコマ ンド
- PUSH キーコマンド
- ONキーコマ ンド
- OFFキーコ マンド
- 画面コマンド
- DOG画面コ マンド 1
- DOG画面コ マンド 2
- CPU画面コ マンド 1
- CPU画面コ マンド 2
- バージョンコ マンド
- 入力ポートコ マンド
- 出力ポートコ マンド
- CPU天体赤 経コマンド
- CPU天体赤 緯コマンド
1章概説
DOGとはDigital Observers Guiderの略です。本機がお客様の天体観測の忠実なDOGとして、末永くご愛用いただけるようにと気持ちを込めてこの名前をつけました。
本機には、次のような特徴と機能があります。
![]() DOGは、初心者から本格的な天体写真を撮る天文マニアまで、そのご要求に答えられるように、 豊富なシステム機能と過酷な環境下での確実な動作を提供します。
DOGは、初心者から本格的な天体写真を撮る天文マニアまで、そのご要求に答えられるように、 豊富なシステム機能と過酷な環境下での確実な動作を提供します。
![]() 初心者でも簡単に、望遠鏡の視野に天体を入 れる事ができます。
初心者でも簡単に、望遠鏡の視野に天体を入 れる事ができます。
M(メシエ)天体・R天体・マニュアル導入機能・CPU天体導入機能
![]() 3方式天体導入(自動導入・手動導入・手動自動連用式の導入)が可能。
3方式天体導入(自動導入・手動導入・手動自動連用式の導入)が可能。
エンコーダー方式(手動・手動自動連用式)では、10000倍速以上のスピードを達成。
エンコーダーを最大3個接続可能です。赤経・赤緯・ドーム制御用
![]() 天体写真を撮影する場合に役立つ豊富な機能があります。
天体写真を撮影する場合に役立つ豊富な機能があります。
ガイド機能、可変追尾機能(メトカーフ)、キー反転機能、時計機能、恒星時機能、オートガイダーVST,SST,ST-4用コネクター標準 装備。
![]() パソコンのRS-232Cポートに接続して、遠隔自動制御ができます。
パソコンのRS-232Cポートに接続して、遠隔自動制御ができます。
![]() 入力ポート(最大6ビット)、出力ポート(最大16ビット)があります。
入力ポート(最大6ビット)、出力ポート(最大16ビット)があります。
![]() 赤経、赤緯のモータを自由自在に制御できます。
赤経、赤緯のモータを自由自在に制御できます。
倍速機能、バックラッシュ機能、リニアガイド、ワンショットガイド、HIGH SPEED機能、オルタネート機能
![]() 暗闇での使用でも不便にならないように、照 明やキー操作などを工夫しています。
暗闇での使用でも不便にならないように、照 明やキー操作などを工夫しています。
わすか7個のキーで操作、ELバックライト付液晶表示(英、数、カナ、記号表示可能)、ブザー内蔵
![]() 本機には、341個の天体が収録してありま す。M天体110個(メシエ)、R天体(恒星)
本機には、341個の天体が収録してありま す。M天体110個(メシエ)、R天体(恒星)
![]() 内蔵されているチリュウムバッテリーで本機の時計を、電源OFFから守ります。
内蔵されているチリュウムバッテリーで本機の時計を、電源OFFから守ります。

- 電源コードの 接続を絶対に間違えないように注意して下さい。本機を破損する危険性があります。
- 電源スイッチ を一度OFFにした時は、5秒以上たってからONにして下さい。電源のON/OFFは、必ず本機の電源スイッチで行って下さい。
- オートガイ ダーVST,SSTやI/O CONNECTORを接続する場合は、必ず電源スイッチがOFFの状態で行って下さい。
- 極端な高温下 や低温下での使用は避けて下さい。極端に湿度の高い場所や、ほこりの多い場所での保管および使用は避けて下さい。
- 本機は精密な 電子部品でできていますので、衝撃を加えたり、衝撃、振動の加わる場所での保管および使用は避けて下さい。
- 本機を、分 解、改造したりしないでください。保証を受けられない場合があります。
- 本機を赤道儀 に接続して使用する場合は、そばから離れないで下さい。自動導入時に、鏡筒と赤道儀あるいは三脚に衝突する危険性があります。
以下の手順に注意しながら電源投入を行って下さい。
- まず、電源ス イッチがOFFになっているか確認して下さい。
- 電源ケーブル の赤いコードはバッテリーの+端子へ、黒は-へ確実に接続します。
- 赤経・赤緯 モータープラグを赤道儀のパルスモーターへ接続します。内部データの設定や本体の動作テストの場合は接続しなくてもかまいません。オートガイダーVST,
SST(ST-4)やI/O CONNECTORを使用する場合は、ここで接続します。接続は必ず電源スイッチがOFFの状 態で行って下さい。
- 以上でDOG の準備は完了です。 実際の観測にあたっては、赤道儀のセッティングは事前に行っておきます。極軸のセッティング精度は導入精度に影響を与えますので、入念に合わせましょう。
- 電源スイッチ をONにして下さい。
- 電源スイッチ ONと同時にブザーが鳴り、液晶表示器にタイトルが表示され、すぐに下図の例のように表示が変わって止まります。
正常に起動しない場合は、ただちにスイッチを切って、原因を調べて下 さい。
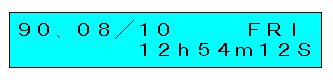
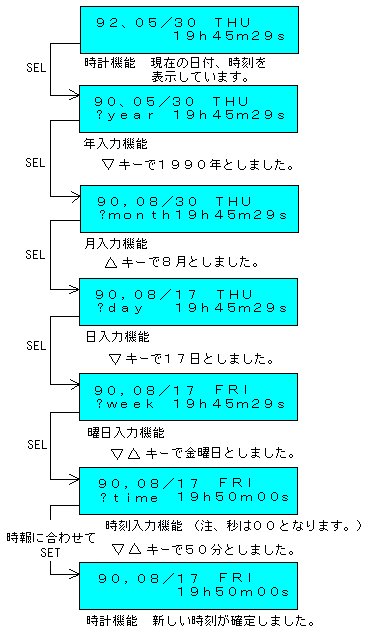
これは 「時計モード」で、意味は「現在は1990年8月10日金曜日12時54分12秒です」ということを表示しています。
![]() 表 示された時間が不正確な場合は、後述する「時計モード」で修正する事ができます。
表 示された時間が不正確な場合は、後述する「時計モード」で修正する事ができます。
2章 DOG
動作モードとキー操作
について
![]() 動作モードについて
動作モードについて
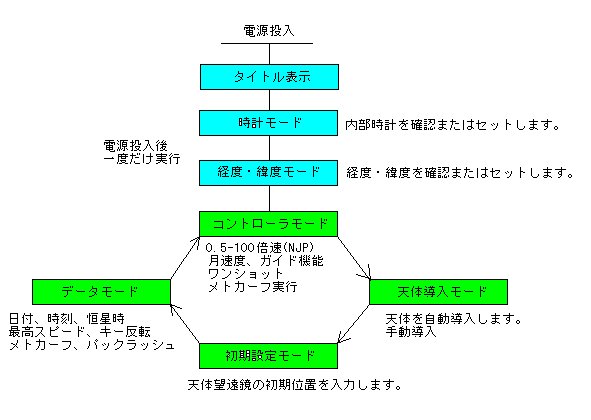
ここで言う、動作モードとは、DOGにそなわっている機能のうち、「関係の深い機能ごとの集まり」を意味しています。
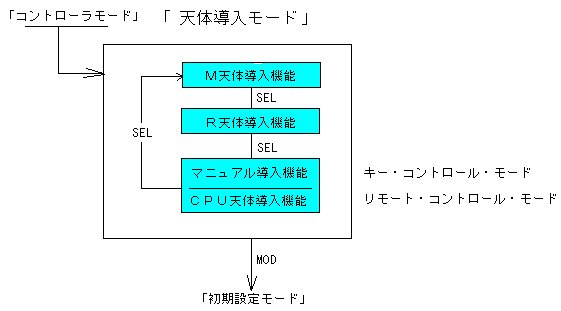
![]() 例えば、「コントローラモード」では、16倍速機能、4倍速機能、0.5倍速機能、ガイド機
能・・・・など、コントローラ(モータードライブ)に関する機能などの集まりです。これらの機能はコントローラモードの中で入れ替わりでてきます。
例えば、「コントローラモード」では、16倍速機能、4倍速機能、0.5倍速機能、ガイド機
能・・・・など、コントローラ(モータードライブ)に関する機能などの集まりです。これらの機能はコントローラモードの中で入れ替わりでてきます。
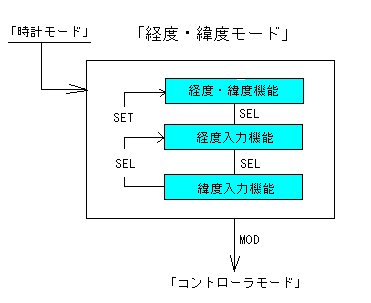
![]() 動作モードには、電源投入後一度だけ実行されるモードと、実際の観測で繰り返し実行されるモー ドの2種類あります。
動作モードには、電源投入後一度だけ実行されるモードと、実際の観測で繰り返し実行されるモー ドの2種類あります。
下図で動作モードの種類と働きについて説明します。
![]() キー操作について
キー操作について
DOGの操作パネルには、7個のキーがついています。わずか7個のキーですが、DOGではこれをたくみに使い分けて複雑な機能を簡単に実行 させることができます。各動作モードおける基本的な操作は、ほぼ統一されていますので、初めての方にも比較的容易に覚えてもらえるでしょう。詳細なキー操
作については、それぞれの動作モードの解説を参照していただくとして、ここでは最も基本的なキーの働きについて説明します。
![]() MODキー
MODキー
このキーを押すと現在の動作モードから次の動作モードへ切り替わります。
例) 「時計モード」なら「経度・緯度モード」へ切り替えます。
![]() SELキー
SELキー
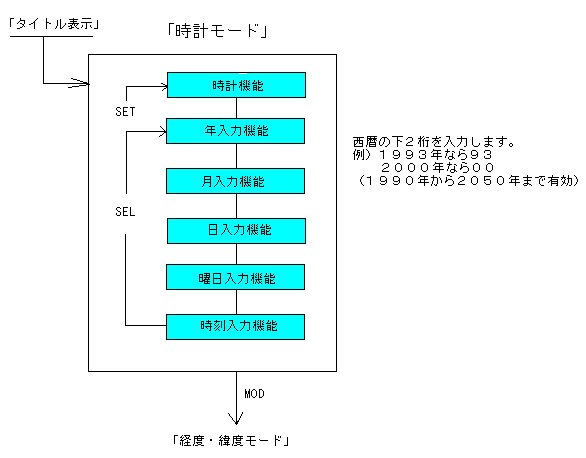
各動作モードには、それぞれに固有の複数の「機能」があります。SELキーは、動作モードに含まれる複数の機能を切り替えます。
例)「時計モード」においてなら
「年入力機能」![]() 「月入力機能」
「月入力機能」![]() 「日 入力機能」
「日 入力機能」![]() 「曜日入力機能」
「曜日入力機能」![]() 「時
刻入力機能」
「時
刻入力機能」
![]() SETキー
SETキー
このキーは、モードによっていくつかの使い方に分かれますが、基本は、何々を「入力せよ」「実行せよ」という意味があります。
例)「時計モード」 ...時刻を設定する
例)「天体導入モード」...指示した天体の導入を開始せよ
![]()
![]()
![]() キー
キー
「コントローラモード」では、赤緯モーターの回転方向を制御します。その他のモードにおいては、天体番号、時間、赤緯の値などを入力するの に使います。
![]()
![]()
![]() キー
キー
「コントローラモード」では、赤経モータの回転方向を制御します。その他のモードにおいては、赤経値の入力などに使います。
[TOP]
時計モード
DOGには、クォーツ発振時計を内蔵しています。時計は、年、月、 日、曜日、時間を管理しており、「時計モード」ではこれらの日付、時刻などを合わせたり修正したりする事ができます。DOGを初めてご使用になる場合は、
このモードを実行して正しく時計を合わせて下さい。時計の精度は十分信頼できるものですが、時間の経過とともに少しずつ誤差が増えていくことも考えられま すので、観測前に時報で合わせておかれることをお薦めします。本機の「地方恒星時」はこの時計をもとにして計算されます。
![]() 本機の時計は、バッテリバックアップされていますので、電源がOFFになっても動作していま
す。
本機の時計は、バッテリバックアップされていますので、電源がOFFになっても動作していま
す。
以下にキー操作と機能について説明します。
(注意) 入力する日付、時間は必ず日本時でなければなりません。
入力機能を使用して時間などを修正された場合には、必ずSETキーを押して下さい。SETキーを押さない限り、新しい時間は内部時計にセッ トされません。
MODキーを押しますと、「時計モード」から「経度・緯度モード」に切り替わります。
![]() 「時計モード」操作例
「時計モード」操作例
[TOP]
このモードで観測地の経度と緯度を入力します。経度の入力は必ず東経で行って 下さい。西経の場合は「360度-西経」の値を求めて入力して下さい。緯度については、北緯が+南緯が-です。各値の最小入力単位は15”です。
![]() 電源投入直後では、東経は135度、緯度は+35度に標準設定されます。日本国内で天体自動導
入をする場合は、標準設定のままでも「初期設定」さえ注意するなら(子午線の位置がすこし変化します)このままで問題ないでしょう。
電源投入直後では、東経は135度、緯度は+35度に標準設定されます。日本国内で天体自動導
入をする場合は、標準設定のままでも「初期設定」さえ注意するなら(子午線の位置がすこし変化します)このままで問題ないでしょう。
![]() 緯度については、実用上標準設定のままで十分でしょう。
緯度については、実用上標準設定のままで十分でしょう。
以下にキー操作と機能について説明します。
(注意) 入力機能を使用した場合は、必ずSETキーを押して下さい。SETキーを押さない限り、新しい経度・緯度は設定されません。
入力している途中にMODキーを押すと次の「コントローラモード」に切り替わってしまいます。
![]() 「経度・緯度モード」操作例
「経度・緯度モード」操作例
(作成中 英語マニュアルをご参照ください)
[TOP]
このモードにあるDOGは「ガイド機能」付き2軸モータードライブとして動作 します。スピードは、X0.5,X2,X4,X17,X70倍速(EM200)を用意いたしました。
![]() 本機では2倍速を超えるモーター制御に対 し、オルタネート機能をサポートしています。X2倍速以下の場合はキーを押している間だけ、モーターが回転します。その他の速度の場合は、一度押して離し
てもモーターはその速度で回り続け、再度同じキーを押すと元に戻ります。
本機では2倍速を超えるモーター制御に対 し、オルタネート機能をサポートしています。X2倍速以下の場合はキーを押している間だけ、モーターが回転します。その他の速度の場合は、一度押して離し
てもモーターはその速度で回り続け、再度同じキーを押すと元に戻ります。
![]() 各キーの回転方向は、「データモード」の「キー反転機能」で設定されたものになります。
各キーの回転方向は、「データモード」の「キー反転機能」で設定されたものになります。
![]() 最高速度は、「データモード」の「HIGH
SPEED 機能」において指定されたスピードになります。
最高速度は、「データモード」の「HIGH
SPEED 機能」において指定されたスピードになります。
![]() 赤緯モータを逆回転させた時に発生するバックラッシュは、「データモード」の「バックラッシュ
機能」の設定にしたがって、自動的に補正します。
赤緯モータを逆回転させた時に発生するバックラッシュは、「データモード」の「バックラッシュ
機能」の設定にしたがって、自動的に補正します。
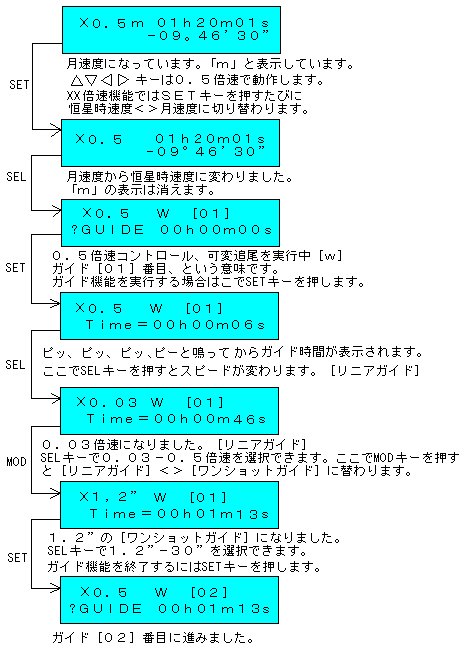
![]() 「ガイド機能」では上記に述べた、X0.5 -X70倍速(EM200)とは別に、2種類の特別なガイドコントロールができます。ガイド中に、以下の種類/段階を、MOD/SELキーで自由に選択で
きます。
「ガイド機能」では上記に述べた、X0.5 -X70倍速(EM200)とは別に、2種類の特別なガイドコントロールができます。ガイド中に、以下の種類/段階を、MOD/SELキーで自由に選択で
きます。
![]() リニアガイド.....X0.03-X0.5倍速までの5段階から選択できます。これは、通常のXX倍速機
能と同じものです。
リニアガイド.....X0.03-X0.5倍速までの5段階から選択できます。これは、通常のXX倍速機
能と同じものです。
![]() ワンショットガイド.....キーを一回押すたびに、指定のワンショット量分移動するものです。赤緯の場合は移動
後に止まり、赤経では移動後に恒星時速度又は、月速度に戻ります。ワンショット量は、1.2”- 30”(EM200)までの5段階です。
ワンショットガイド.....キーを一回押すたびに、指定のワンショット量分移動するものです。赤緯の場合は移動
後に止まり、赤経では移動後に恒星時速度又は、月速度に戻ります。ワンショット量は、1.2”- 30”(EM200)までの5段階です。
![]() 「ガイド機能」では、「データモード」の
「可変追尾機能」で設定した可変追尾ができます。赤緯の移動方向にバックラッシュがあれば、自動的に「バックラッシュ機能」を実行して、これを取り除きま す。
「ガイド機能」では、「データモード」の
「可変追尾機能」で設定した可変追尾ができます。赤緯の移動方向にバックラッシュがあれば、自動的に「バックラッシュ機能」を実行して、これを取り除きま す。
![]() XX倍速機能において、SETキーを押す
と、「m」と表示されて月速度になります。もう一度押すと、表示は消えて恒星時速度になります。
XX倍速機能において、SETキーを押す
と、「m」と表示されて月速度になります。もう一度押すと、表示は消えて恒星時速度になります。
![]() 「データモード」の「モータ・エンコーダー
機能」において、「エンコーダー方式」に設定されている時は、クランプを緩めて望遠鏡を操作しても、常に正しい赤経・赤緯を表示します。(デジタル表示機 能)
「データモード」の「モータ・エンコーダー
機能」において、「エンコーダー方式」に設定されている時は、クランプを緩めて望遠鏡を操作しても、常に正しい赤経・赤緯を表示します。(デジタル表示機 能)
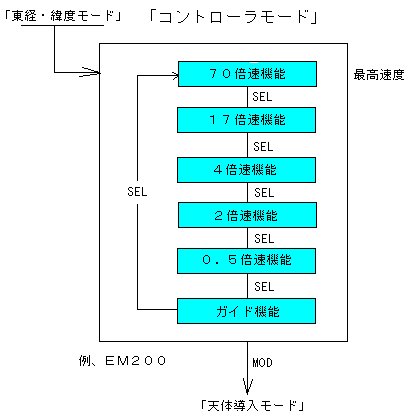
![]() 「コントローラモード」操作例
「コントローラモード」操作例
このモードで天体を導入できます。
![]() 目標天体の指定...M/R天体から選ぶか、マニュアル導入で指定します。
目標天体の指定...M/R天体から選ぶか、マニュアル導入で指定します。
![]() M/R天体...DOGにあらかじめ記憶されている天体です。M(メシエ)天体番号、R天体番
号を指定して導入します。
M/R天体...DOGにあらかじめ記憶されている天体です。M(メシエ)天体番号、R天体番
号を指定して導入します。
![]() マニュアル導入...ユーザーが直接赤経・赤緯を指定して導入します。
マニュアル導入...ユーザーが直接赤経・赤緯を指定して導入します。
![]() CPU天体導入
CPU天体導入
通信機能を使用している状態(リモート・コントロール・モード)では、マニュアル導入に替わってCPU天体導入になります。これは、マニュ アル導入では、初期値に現在の望遠鏡が向いている赤経・赤緯が与えられますが、CPU天体導入では、「CPU天 体」の赤経・赤緯を初期値とします。その他の働きは同じです。
![]() 天体導入の方法...DOGは2種、3方式の天体導入を実行できます。
天体導入の方法...DOGは2種、3方式の天体導入を実行できます。
![]() エンコーダーを使用していない場合。「モーター方式(オープンループ制御)」
エンコーダーを使用していない場合。「モーター方式(オープンループ制御)」
1、自動導入...(つねに、赤道儀のクランプは締めたままにして下さい。
![]() エンコーダーを使用する場合。「エンコーダー方式(クローズドループ制御)」
エンコーダーを使用する場合。「エンコーダー方式(クローズドループ制御)」
1、自動導入...(赤道儀のクランプを緩める事はできません。)
2、手動導入...(クランプを緩めて手動操作で導入します。)
3、手動自動連用式...(手動操作に続けて自動導入で目標天体を導入します。)
自動導入速度は、「データモード」の「HIGH SPEED機能」において指定されたスピードになります。
以下にキー操作と機能について説明します。
![]() 「天体導入モード」操作例
「天体導入モード」操作例
(作成中 英語マニュアルをご参照ください)
[TOP]
![]() 「モーター 方式」による自動導入 (通信機能は未使用、キー・コントロール・モード)
「モーター 方式」による自動導入 (通信機能は未使用、キー・コントロール・モード)
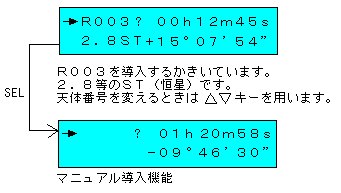
初期値に現在の 望遠鏡が向いている赤経・赤緯が表示されます。この位置を書換えて、導入位置を指定します。![]()
![]() キーを使って赤経、
キーを使って赤経、![]()
![]() キーで赤緯をそれぞれ書換えます。
キーで赤緯をそれぞれ書換えます。
![]() 上記のどの場合でも、目的の天体位置が表示されているときにSETキーを押すと、ピーとブザー
が鳴って、「モーター方式」による自動導入を開始します。
上記のどの場合でも、目的の天体位置が表示されているときにSETキーを押すと、ピーとブザー
が鳴って、「モーター方式」による自動導入を開始します。
![]() 導入中は、リアルタイムで赤経・赤緯の値を表示します。
導入中は、リアルタイムで赤経・赤緯の値を表示します。
![]() 導入動作を中断したいときは、SETキーを押します。
導入動作を中断したいときは、SETキーを押します。
![]() 導入終了または中断したときは、自動的に「コントローラモード」になり、その時の正しい赤経・
赤緯を表示しています。そのため再度「天体導入モード」へ切り替えて自動導入を継続することができます。
導入終了または中断したときは、自動的に「コントローラモード」になり、その時の正しい赤経・
赤緯を表示しています。そのため再度「天体導入モード」へ切り替えて自動導入を継続することができます。
![]() 「エンコーダー方式」による自動導入
(通信機能を使用中、リモート・コントロール・モード)
「エンコーダー方式」による自動導入
(通信機能を使用中、リモート・コントロール・モード)
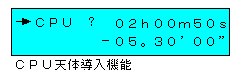
![]() 「CPU天体」の赤経・赤緯を表示しています。
「CPU天体」の赤経・赤緯を表示しています。![]()
![]()
![]()
![]() キーを使って赤経と赤緯を書換えることができます。必ず、クラン
プは締めたままにして下さい。
キーを使って赤経と赤緯を書換えることができます。必ず、クラン
プは締めたままにして下さい。
![]() ここでSETキーを押すと、「エンコーダー方式」による自動導入を開始します。
ここでSETキーを押すと、「エンコーダー方式」による自動導入を開始します。
![]() 「エンコー ダー方式」による手動導入と手動自動連用式の導入
「エンコー ダー方式」による手動導入と手動自動連用式の導入

![]() SETキーを押す と赤経・赤緯が、赤経時角と赤緯時角に表示が変わります。頭に#が付きます。時角は、現在の望遠鏡の位置と目標天体の位置の距離を表わしています。
SETキーを押す と赤経・赤緯が、赤経時角と赤緯時角に表示が変わります。頭に#が付きます。時角は、現在の望遠鏡の位置と目標天体の位置の距離を表わしています。
![]() 手動導入の方法は、ここでクランプを緩め手動操作で、赤経時角と赤緯時角がいずれもで
きるだけゼロに近付くように 望遠鏡の向きを変えます。(なるべく1m以下) 操作が完了(この時、望遠鏡の視野に目標天体が見えます)したら、クランプを締め、SETキーを押すと、コントローラモードになります。
手動導入の方法は、ここでクランプを緩め手動操作で、赤経時角と赤緯時角がいずれもで
きるだけゼロに近付くように 望遠鏡の向きを変えます。(なるべく1m以下) 操作が完了(この時、望遠鏡の視野に目標天体が見えます)したら、クランプを締め、SETキーを押すと、コントローラモードになります。
![]() 手動自動連用式の方法は、手動導入でゼロに近付けてから、必ずクランプを
締めMODキーを押します。すると、「エンコーダー方式」による自動導入が始まり、導入完了と同時にピーとブザーが鳴ってコントローラモードに替 わります。
手動自動連用式の方法は、手動導入でゼロに近付けてから、必ずクランプを
締めMODキーを押します。すると、「エンコーダー方式」による自動導入が始まり、導入完了と同時にピーとブザーが鳴ってコントローラモードに替 わります。
![]() 導入天体の位置によっては、赤緯時角に「
導入天体の位置によっては、赤緯時角に「
![]() 」 が表示されることがあります。
」 が表示されることがあります。
これは現在の望遠鏡の位置と目標天体の位置が子午線をはさんで西と東に分かれていることを示しています。この場合は、仮に望遠鏡が西側に向 いているなら東側へ、東なら西へ向けます。すると「![]() 」の記号が#に変わりま
す。
」の記号が#に変わりま
す。
(注意) 向きを変える場合は、必ず、鏡筒本体の中心位置はバランスウエイトより上である必要があります。初期設定モード」の項を、ご参照下さい
はじめに、天体望遠鏡がどこに向いているか分からなければ、DOGは正常に動 作することができません。「コントローラモード」、「天体導入モード」などを活用する前に、必ずこのモードで望遠鏡の向きをDOGに教えて下さい。一度、
初期設定してしまえば、どの位置に望遠鏡が向いていてもすぐに天体導入を実行できます。
![]() 初期設定の手順
初期設定の手順
(1) まず導入したい天体 の近くの明るい天体(M/R天体に記憶されているもの)の種類と天体番号を調べます。次に赤道儀のクランプを緩めて、望遠鏡の視野にこの天体を入れ、クラ
ンプを締めます。
![]() このとき、鏡筒本体の中心位置は、必ずバランスウエイトより上になければなりません。(下図参
照)そのため、子午線(北極から南極へ引いた線のうち天頂を通過するもの)付近の天体ではこれが分かりにくいので、なるべく避けて下さい。
このとき、鏡筒本体の中心位置は、必ずバランスウエイトより上になければなりません。(下図参
照)そのため、子午線(北極から南極へ引いた線のうち天頂を通過するもの)付近の天体ではこれが分かりにくいので、なるべく避けて下さい。
どうしても、その必要があるときは、地方恒星時と天体の赤経を比較することで判定できます。地方恒星時は、「データモード」の「恒星時機 能」でわかります。
(2) 次に、「コントローラモード」に切り替え、![]()
![]()
![]()
![]() キーを操作して、天体を視野のできるだけ中心にもってきます。
キーを操作して、天体を視野のできるだけ中心にもってきます。
(3) MODキーを押して、「初期設定モード」にします。次にSELキーにより視野の中心に見えてい る天体の種類(M/R)を選びます。
(4) 次に、![]()
![]() キー で天体の番号を合わせます。
キー で天体の番号を合わせます。
(5)
最後に、SETキーを押して初期設定が完了します。
(作成中 英語マニュアルをご参照ください)
[TOP]
このモードで、 日本時、地方恒星時を表示するほか、HIGH
SPEEDの変更、キー反転、バックラッシュ補正、可変追尾、エンコーダー方式の設定などができます。
![]() HIGH
SPEED機能
HIGH
SPEED機能
コントローラモードの最高速と自動導入速度を決定します。バッテリー の容量低下などにより、最高速でモーターを駆動できない場合には、この機能を用いてスピードを下げてください。スピードは遅くなりますが駆動できることが
あります。
- NJP................ X100,95,90・・・・25、20
- EM200/EX.......... X70 - 19
- EM10............... X70 - 19
- GP/D (SP/DX)/SE....X120 - 19
(注意) ご使用の赤道儀によっては、可能な最高速度が低めになることがあります。DOGブースター(別売)を使用しない場合は、最高速の約1/2程度のスピードが
可能です。ただし、NJP高速仕様では、そのままでも約100倍速が可能です。
![]() キー反転機能
キー反転機能
コントローラモードにおいて、![]()
![]() キー(赤経)、
キー(赤経)、![]()
![]() キー (赤緯)の働きを、各々反転指定できます。反転することで、見かけじょう星の動きとキー方向を一致させることができますので、ガイド撮影には便利でしょ
う。
キー (赤緯)の働きを、各々反転指定できます。反転することで、見かけじょう星の動きとキー方向を一致させることができますので、ガイド撮影には便利でしょ
う。
![]() バックラッシュ機能
バックラッシュ機能
赤緯モータを逆回転させた時に発生するバックラッシュは、ガイド撮影 時などで操作性の悪化という問題を引き起こすばかりか、撮影の正否さえ左右することもあります。X2倍速以上のスピードではあまり気になりませんが、
X0.5倍速以下の低速では、逆回転してもなかなか星が動こうとしません。この機能は、以上のバックラッシュを見かけ上解消するために、その間、指定され た補正量分だけモーターを高速で逆回転させます。
この機能は、コントローラモードで自動的に実行します。
スピードは、2種類を選べます。補正量は、2- 999パルス指定可能です。補正量は、電源投入直後では標準値に設定されます。
![]() 可変追尾機能(メトカーフ)
可変追尾機能(メトカーフ)
赤経と赤緯の両軸にわたって変化をする天体を自動 追尾できる機能です。可変範囲は、およそ100”-400”/10 分です。その指定は、液晶表示器を見ながら直接入力できます。この機能は、「可変追尾機能」とコントローラモードの「ガイド機能」で実行します。
応用としては次のようなものです。
- 彗星のメト カーフ追尾
- 極軸誤差補正
- 大気差補正
- 月追尾
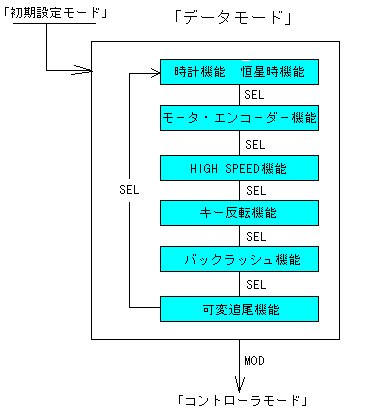
![]() 「データモード」操作例
「データモード」操作例
ここでは、実例をあげて「可変追尾機能」の使用方法について説明します。
(作成中 英語マニュアルをご参照ください)
[TOP]
![]() 「データモード」の「バックラッシュ機能」で設定した「補正パルス量」から、およそのバック ラッシュ量を次の式で計算できます。
「データモード」の「バックラッシュ機能」で設定した「補正パルス量」から、およそのバック ラッシュ量を次の式で計算できます。
![]() 補正パルス量のおよその目安は、EM200、EM10などでは、80-150ぐらい。NJPで
は20-100ぐらが多いようです。
補正パルス量のおよその目安は、EM200、EM10などでは、80-150ぐらい。NJPで
は20-100ぐらが多いようです。
しかし、これまでのテストの経験では、非常に大きなバックラッシュを持つものもありましたので(小型赤道儀)参考にとどめて下さい。
![]() 実際の設定にあたっては、「バックラッシュ
機能」で補正量をセットしてから、「コントローラモード」の「XX倍速機能」でチェックをする、これを何度か行って最も使いやすいところに合わせて下さ い。
実際の設定にあたっては、「バックラッシュ
機能」で補正量をセットしてから、「コントローラモード」の「XX倍速機能」でチェックをする、これを何度か行って最も使いやすいところに合わせて下さ い。
![]() バックラッシュは逆転しても動かない不動領
域と、動き始めてもその影響が残る影響領域からなります。影響領域まで全て補正しようとすると、バックラッシュ補正機能の働きが星の動きとなって外に現わ れてくることがありますので、設定する補正パルス量は、なるべく控えめにしたほうが良い結果が得られます。
バックラッシュは逆転しても動かない不動領
域と、動き始めてもその影響が残る影響領域からなります。影響領域まで全て補正しようとすると、バックラッシュ補正機能の働きが星の動きとなって外に現わ れてくることがありますので、設定する補正パルス量は、なるべく控えめにしたほうが良い結果が得られます。
また、影響領域においては、[リニアガイド]のスピードは遅くなり、[ワンショットガイド]では移動量が少なめになります。影響領域の大き さは、テストの結果では、およそ10”-30”ぐ
らいありました。(小型赤道儀)この原因は、赤道儀の機械部分、とりわけギア関係の機械的性質によるもと考えられます。
![]() 「モーター方式」における自動導入誤差は、およそ次の通りです。
「モーター方式」における自動導入誤差は、およそ次の通りです。
EM200,NJP......+-15’以下です。
GP・D、EM10,SE,EX.....+-20’以下です。
![]() 「 エンコーダー方式」では、約40-50倍前後の視野で導入できます。
「 エンコーダー方式」では、約40-50倍前後の視野で導入できます。
![]() 導入誤差の大小は、以下の要因などで変化し
ます。うまく導入できない場合は、チェックしてください。
導入誤差の大小は、以下の要因などで変化し
ます。うまく導入できない場合は、チェックしてください。
「モーター方式」では
- 極軸誤差
- 極軸と赤緯軸 との直交誤差
- 鏡筒のバラン ス不良
- 「初期設定 モード」での設定誤差
- 分点の誤差
- 大気差
「エンコーダー方式」では更に
- エンコーダー のガタ(取付け不良)
- エンコーダー 内のコードホイール加工精度
3章 通信機能
DOGは2種類の方法でコントロールできます。ひとつは、DOGを単体でコン トロールする方法。もうひとつは、DOGにパソコンを接続してコントロールする方法です。前者の状態をキー・コントロール・モードといい、後者をリモー
ト・コントロール・モードと言うことにします。
① キー・コントロール・モード
コントローラ(モータードライブ)関係や天体自動導入関係などの諸機 能を、簡単なキースイッチの操作だけでコントロールできます。
②リモート・コントロール・モード
![]() キースイッチの操作によって、「キー・コントロール・モード」
の機能も実行できます。
キースイッチの操作によって、「キー・コントロール・モード」
の機能も実行できます。
![]() また通信機能によって、キー操作をリモート
コントロールし、実行することも可能です。
また通信機能によって、キー操作をリモート
コントロールし、実行することも可能です。
![]() 通信機能には、リモートコントロールのほか
に、各種の機能が含まれています。
通信機能には、リモートコントロールのほか
に、各種の機能が含まれています。
![]() 通信機能は、パソコンとDOGの間で、コマ
ンド(ASCIIコード)とアンサーを所定の手順に従って送信・受信することで実行されます。
通信機能は、パソコンとDOGの間で、コマ
ンド(ASCIIコード)とアンサーを所定の手順に従って送信・受信することで実行されます。
(省略 英語マニュアルをご参照ください)
外形寸法 180X103X45[mm]
重量 約370グラム