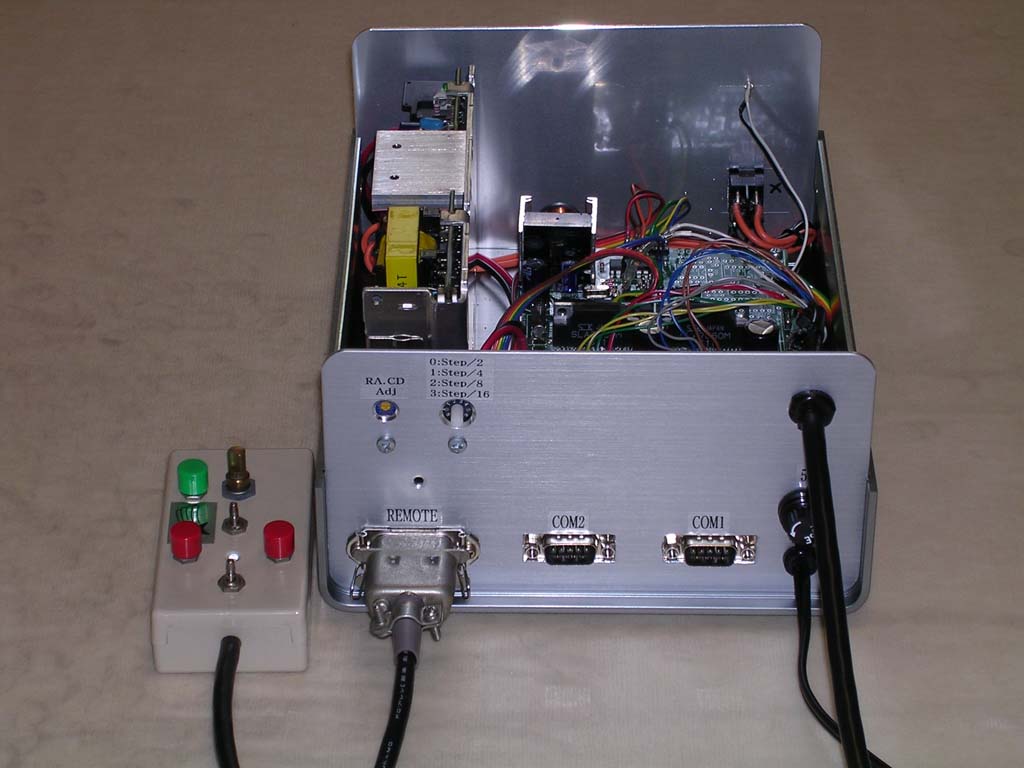
| 新型 天体自動導入装置
DOG NS-2000/5000 開発中 |
(2010,12/12)
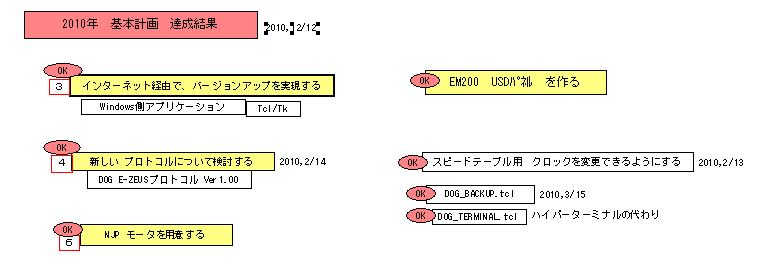
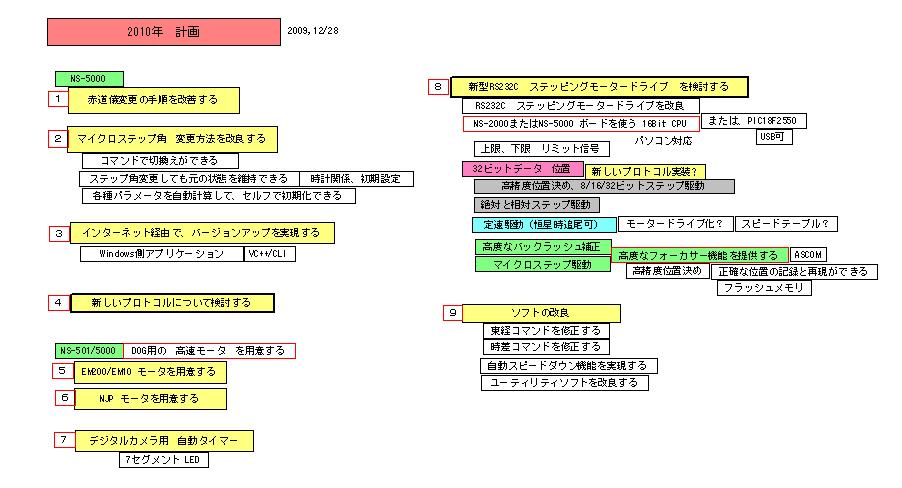
■今年も残りわずかになりました。年初に基本計画を作りましたが、実現できたのは下図の通りでした。
当初の計画(2009,12/28)に比べ、情けない結果に終わりました。
この一年を振り返って、だんだんと来年はもう一段レベルアップをしてやろうという気持ちになっています。
2011年計画を検討中です
その中で最も重要な目標は、新型ハンドボックスの開発になるでしょう。
新型ハンドボックスには、バッテリーを内蔵して、時計・カレンダ、バックライト付き液晶表示器が付いており、
従来のNS-200/500/5000用ハンドボックスの代わりにご利用頂けるようになるでしょう。
その場合は、新型ハンドボックスが、パソコンの代わりとなり、天体自動導入が出来るようになります。
また多数の天体データがハンドボックス本体にメモリされるでしょう。
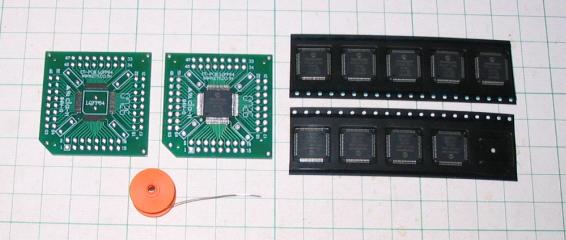
■新型ハンドボックス用CPUボードを作っています。
CPUは、PIC24FJ256GA106という物で、DOGで使っているものと基本的な互換性がありますが、ROM,RAMサイズがかなり大きくなっています。正月もボードの製作を(楽しみながら)やるつもりです。
DOG用 PIC24FJ64GA002 ROM:64KB RAM:8KB RS232C:2チャンネル
ハンドボックス用 PIC24FJ256GA106 ROM:256KB RAM:16KB RS232C:4チャンネル
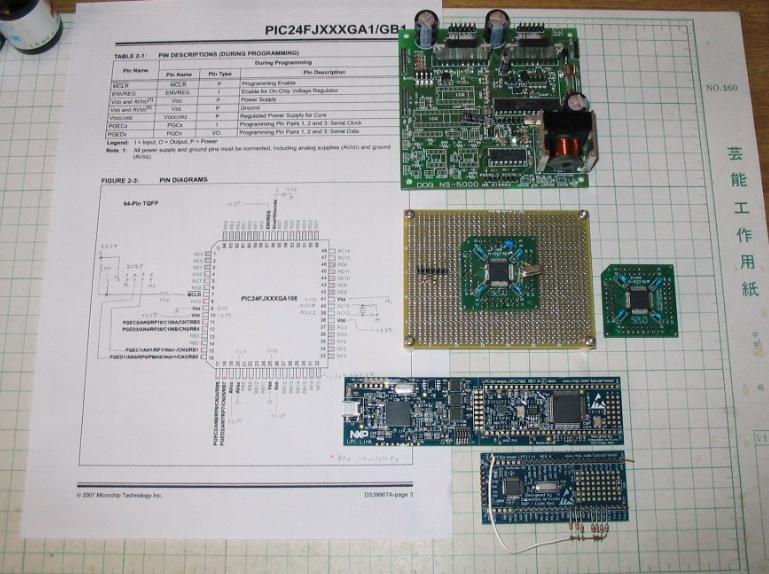
下の細長い基板は32ビットマイコンLPC1768(Cortex-M3)です。
移植中のLPC1114はROMが32KBと小さいので、最終的にNS-5000を移植できるのは、LPC1768クラスになると思います。少し大きすぎるかも知れませんが、ROM512KB、RAM64KBあります。
特に急ぐ必要もないので、移植作業は暇な時に、コツコツ進める予定です。
■お客様からオートガイダーVSTによる写真を送っていただきました。
VSTはDOG本体に内蔵するタイプです。ハードウエアの改造・改良で、お客様から数ヶ月にわたり多大のご協力をいただきました。
お陰さまで、VSTはより安定してオートガイドするようになりました。
その成果をDOG NS-201/501/5000用オプションとして、価格を見直し、販売する予定です
(2010,11/15)
VSTの追確認をしました。
自宅だと光害で長時間露出が出来ませんので赤城山の新坂平(標高1450m)に行ってきました。
風が強く時々雲が通過するような状況でしたがVSTのテストは何とか出来たかと思います。
M33
Vixen VAISAC+F6.4レジューサ(f=1278mm)
Nikon D90(ノーマル) ISO6400/10分 5分x2枚を追加
Viper(90mm/f1200mm x2バロー)+Vixen B05-3M+VST
JP赤道儀+NS-5000

■お客様からメールを頂きました。(2010,6/29)をご覧ください。
赤道儀の最高速度は気温の変化と関係しています。参考にして下さい。
以前NS-5000NJPの最高速について報告させていただきましたが、季節が変わって冬が近くなるに連れて 最高速を低く抑えないと脱調するようになりました。
現在(気温0~5℃)安心して使用できる速度として以下のように設定しました。
DEC側 200倍速→150倍速
RA 側 150倍速→70倍速
RA側は昔から冷えると明らかに回転が重くなる傾向があったので 最高速もここまで下げました。
(2010,11/17)
■32ビットマイコン NS-5000移植の続きです。
10月の段階で、赤経、赤緯モータ処理、ハンドボックスによるコントロール、時計関係、ブザー、LEDコントロールなど、2軸モータドライブに相当する部分はだいたい移植ができていました。ただし、あちこちにバグが残っているようで満足に動いていません。やっとハンドボックスによるスピードの変更、モータの一部コントロールと加速、減速が少々動いている状態です。
他の作業で、そのまま放置していましたが、また作業を再開します。
以上が正常に動くようになると、DOGの土台が移植出来たことになります。
単なる2軸モータドライブの機能だけを移植したように見えますが、加速、減速、バックラッシュ、カレント(パワー)ダウン、32ビット位置など天体自動導入装置としての基本的な機能が含まれています。
赤経、赤緯モータ処理の移植は、規模は大したことないですが、結構複雑で、ロジックが入り組んでいますので、C言語による記述は面倒でした。
移植は、アセンブリ言語のプログラムをそのままC言語に置き換えていきました。
この作業は想像より簡単で順調にいきましたが、一部制御構造の記述は、C言語の定型的な命令では、
上手く表現できず、却って制約となりやりずらい事がありましたが、少し工夫して解決できました。
モータ処理は割込みという方法で実現しています。この割込処理時間は、自動導入に於ける可能な最高速度の上限を決めます。つまり、高速で駆動する場合、この処理時間より速く動かすことはできない事になります。
それでは、もっと高速駆動したい場合は、諦めるか?あるいは、一般的にエンジニアならエンコーダの採用を検討すると思います。
1ステップ時間(割込み処理時間)を測定器(オシロスコープ)で実測してみました。
1ステップ時間(マイクロ秒)
1 NS-500 PIC24F 16Bit CPU 32MHz 16MIPS 40us アセンブリ言語
2 NS-501/5000 PIC24F 16Bit CPU 32MHz 16MIPS 8us アセンブリ言語
3 移植中 LPC1114 32Bit CPU 48MHz 48MIPS
13us C言語
LPC1114は32Bit CPUで、16Bit CPUのざっと3倍ほど高速ですが、結果は、16Bitの方が約1.6倍高速でした。
移植はそのままアセンブリ言語をC言語に置き換えました。ほぼ一対一に対応しています。
これはアセンブリ言語とC言語のパフォーマンスの違いを良く示していると思います。
以上の結果から、NS-5000は16Bit CPUですが、LPC1114 32Bit
CPU 70MHz相当のパフォーマンスが出ていると思います。
写真右側の基板が、移植中のLPC1114 32K ROM 8K RAMです。
7本の抵抗のところがハンドボックスのスイッチにつながります。
(2010,10/18)
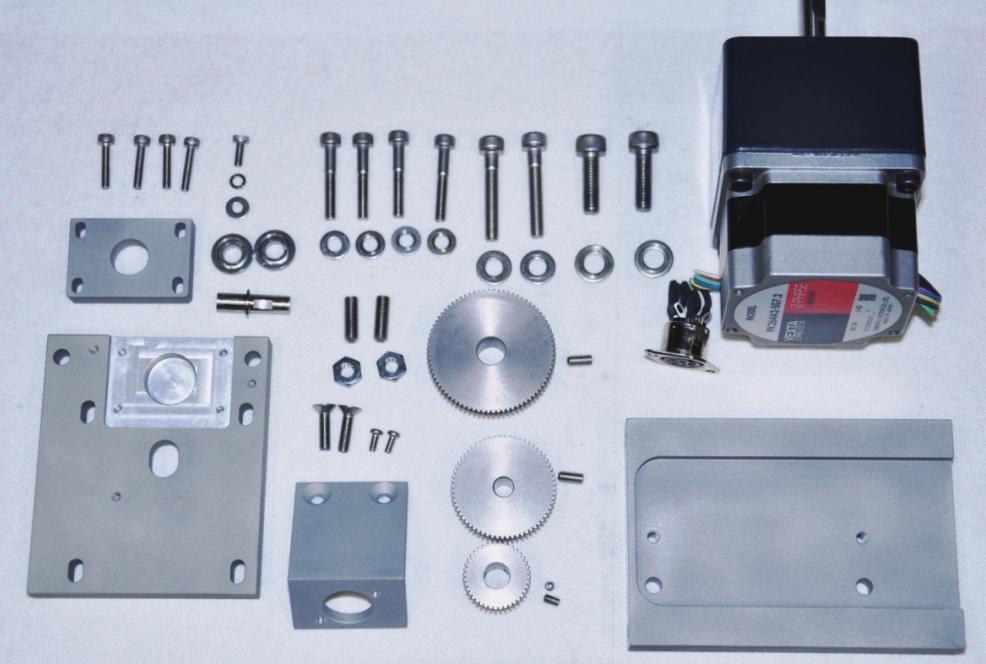
■PK264モータユニット1号機が届きました。
これとDOG NS-5000をお客様に納品しますが、その前に実物を拝見しました。
モータユニット一式です。

箱を開けて、慎重に中身を出しました。

モータカバーとベースユニットです。

アルマイト処理が高級感を出しています。素晴らしい出来栄えです。
すみずみまでしっかり組み上げられていると感じます。

(2010,10/17)
■NS-5000PK264モータユニット取扱説明書が用意できました。
JP_NJP用PK264モータユニット取扱説明書.pdf
■32ビットマイコン NS-5000移植の続きです。
NS-5000を移植する場合は4チャンネルのタイマモジュール、割込について理解する必要があります。
ようやく基本的なCortex-M0/M3のLPC1114/1343の仕組み、プログラミングについて分かってきました。
肝心いのタイマを起動し、割込処理を行うことができました。これは初歩的な事ですが、移植において重要なことだと思ます。
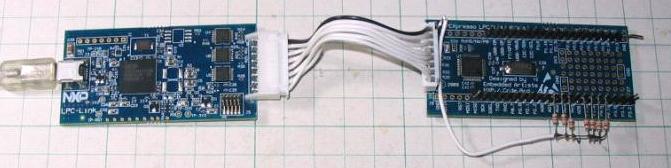
テストプログラムを紹介します。LPCXpresso NXP LPC1114評価ボードで動作します。
ごく簡単なプログラムですが、タイマモジュールの使い方、割込み方法について、一通り完結しています。
このプログラムをベースに拡張していけばARM
Cortex-M0/M3に移植することができると思います。
タイマにより、赤経、赤緯のモータ駆動信号を生成(38PPS)しています。
また、恒星時、標準時の1秒を生成しています。
恒星時の1秒ごとにLEDが点滅し、ブザーがピッと鳴ります。(圧電ブザーをPIO0_8とGND間に接続します)
(NVIC_SetPriority(TIMER_**)は、まだ理解できてないので、怪しいです)
main.c
それから、アセンブリ言語の参考例を載せます。
これは、(2010,2/4)のE-ZEUSプロトコルのメインプログラムで、このままNS-5000
Ver4.15で使っています。
これも将来C言語で移植する予定です。
zeus_unit1.s
(2010,10/8)
■福島県石川町スターライトフェスティバルでDOG NS-5000PK264
を実演する予定です。
今回は個人参加になります。コールマンのタープとブルーの10cmスパイダーレスニュートンが目印です。
お立ち寄りいただければ幸いです。

(2010,10/5)
■旧アトラクス/USD赤道儀用のNS-5000をご利用いただいているお客様からメールをいただきました。
ありがたいメールで少し照れくさいのですが、ご紹介させていただきます。お客様のブログ
(2010年9月29日0:17)
さて、先程22時頃より晴れてきたので、アトラクスにNS-5000をセットして
ステラナビゲーターVer.9でのASCOM経由での自動導入テストを行いました。
NS-5000はマイクロステップ4分割、赤経115倍 赤緯90倍。
搭載鏡筒はGINJI250、PENTAX LX-28mmアイピースをつけて約45倍で
テストしました。
ステラナビはVer.9から新しく追加された「スタイル画面」より「望遠鏡」を選択して、
ASCOM→SkySensor2000-PCの設定で接続しました。
結果は、すごいすごい、ほぼ真ん中にドンピシャですね~!
Perαから木星まで振ったり、また戻してAndγを入れてもほぼ中央にドンピシャ
です。同期は最初にPerαでやっただけ!モーターだけなのに想像以上に精度が
良いのでびっくりしました。
自動導入機はEM200Temma2.Jrも持っているのですが、それと比較しても全く
遜色ない精度で導入出来たと思います。これはすごいですね。
ASCOMを使わずにLX200、Skysensor2000での接続ではやはり上手くいきませんでした。
印象では、モーターの回転方向は赤緯赤経とも正しい方向に回っているようですが、
移動量が指令された量の2倍位の量を動いているような感じでした。赤緯赤経とも
ちょうど2倍位の位置までオーバーランしているような感じです。
なんとなくモーター移動量を1/2とか1/3とかに調整できれば上手くいくような気がします。
でも、ASCOMで完璧に動作するようなので、そちらの接続方法を勧めた方が
いいですよね。
想像以上に素晴らしい精度なので感動してしまいました。
近々オートガイドなどもやってみます。
また結果が分かったら報告させていただきます。
お客様からのメールでDOGはステラナビゲータVer9に対応することが確認できました。
他のお客様からASCOMを使わずに導入ができているとのメールを頂戴しているのですが、現在のところ何故違いが出るのか原因は分かりません。いずれにしてもASCOMで問題なく天体自動導入ができます。
■これからの製品開発のために準備をすすめています。
今後は積極的に表面実装部品(写真のようなIC)を扱う予定です。
より高機能、高密度の製品をつくるためには、表面実装タイプの16/32ビットCPUやICが必要になります。
そこで専用の温度調整半田ごて、極細の(0.3mm)はんだ、フラックス等を用意しました。
あとは実体顕微鏡が欲しいのですが、高いので検討中です。
写真はNS-5000 CPUと完全互換性がある PIC24F256 表面実装タイプのCPUです。
初めて半田付けをやりましたが、結構上手くいきました。
LCD表示器のドライバソフトを開発する予定です。
左側、上がDOG NS-4用、下がNS-12用のキャラクタ(文字)表示専用のLCD表示器です。
右が先日手に入れた、128*64ピクセル グラフィックLCD表示器です。
グラフィックですから文字や絵(アイコンなど)も表示が可能です。
例えば、年配の方にも優しいデカ文字もできるでしょう。
LCD表示器は、DOG、デジタル表示器などいろいろと活用できそうです。
ドライバソフトはキャラクタ、グラフィックどちらも作ります。

(2010,9/16)
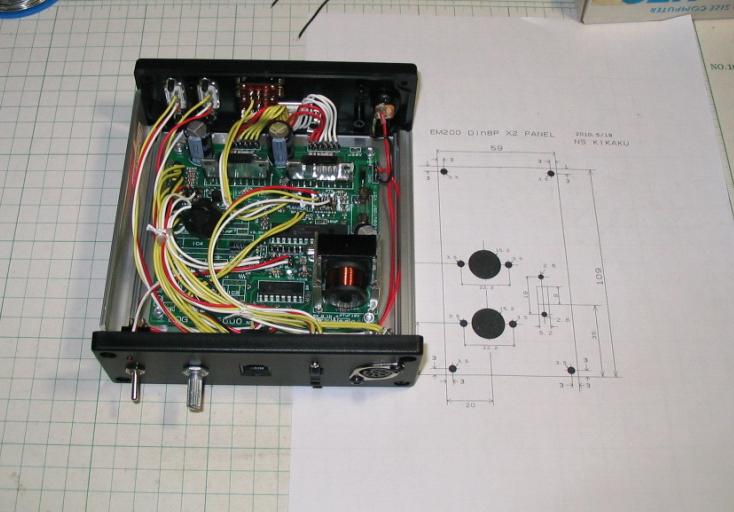
■EM200、EM10用パネルを作りました。

左がEM200 (200Bの場合は12ピンコネクタに交換します)、右がEM10用パネルです。
スイッチで極軸ランプを点灯できます。単5電池2本。
電気はごく僅かですから、ランプを点けたままでも1月は大丈夫でしょう。
(2010,9/14)
■ご注文頂いていたDOGの製作が、完成まであと少しになりました。
左がNS-501EM200とEM10赤道儀兼用です。右が NS-501EM100赤道儀用です。
どちらも型番は、DOG NS-501EM200にしました。
EM100の方は純正のPD-4XY-Bのモータをそのまま使いますので、残念ですがスピードは低速になります。
24Vで30倍速?
それから、モータプラグは現在製造されていませんので、PD-4XY-Bからはずして使いました。

■32ビットマイコン NS-5000移植の続きです。
初めはSH7125にNS-5000システムを移植する計画でしたが、少し修正して、
SH7125 の他にARM Cortex-M0/M3のCPUコアにも、C言語で移植することにしました。
Cortex-M0/M3は、ARMのなかでも最も新しい32ビットアーキテクチャで作られたCPUです。
Cortex-M0/M3は、32ビットでありながら、現在の8ビット、16ビットアプリケーションに最適化できるように設計されています。将来、8、16ビットCPUの大きな脅威になる可能性があると感じました。
写真、下、左の基板は、NXPセミコンダクターズ LPC1114 評価用基板(Cortex-M0)です。
CPUボードにデバッガーも搭載されていて、実機による、ソースレベルのデバッグができます。
今は、これとCortex-M3のボードも手に入れて、いろいろと実験しています。面白いです。
(2010,8/26)
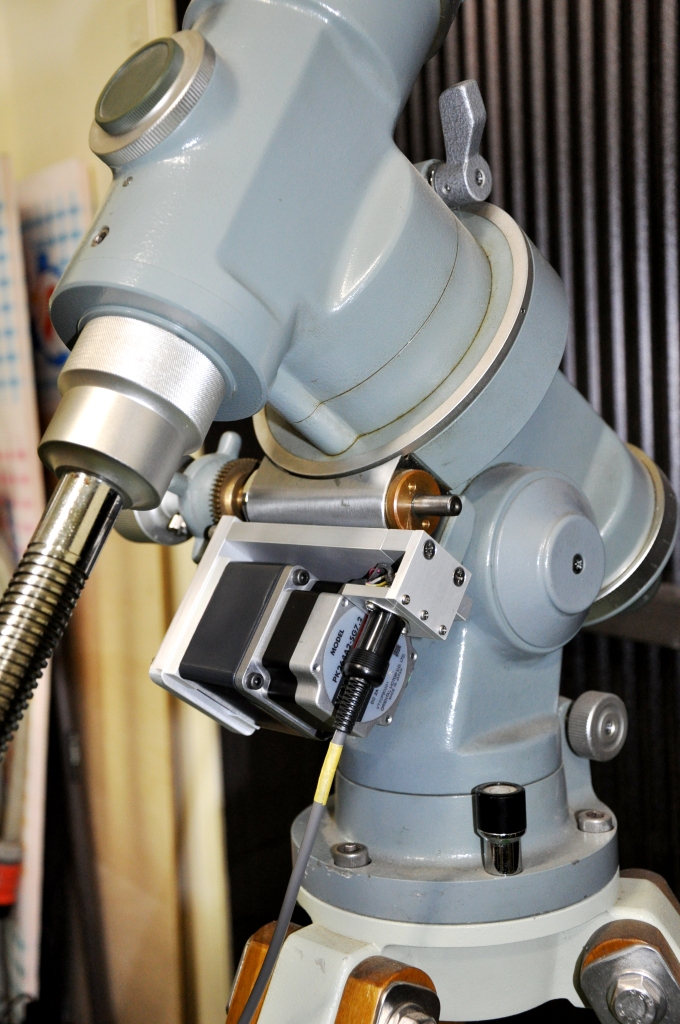
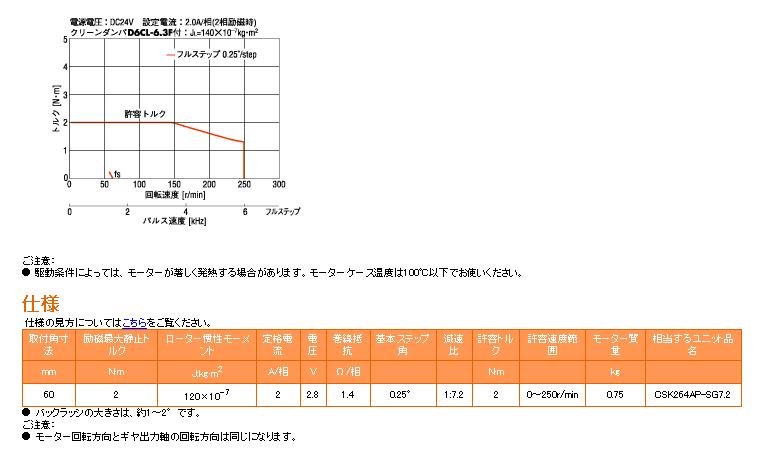
■NS-5000PK264モータユニットの価格が決まり、DOG
NS-5000PK264NJPの販売を始めました。
今日はPK264モータユニットの概要について説明します。
①ギア比、恒星時速度について
赤経ユニット PK264A2-SG7.2 減速ギア比 7.2 伝達ギア比
2
赤緯ユニット PK264A2-SG7.2 減速ギア比 7.2 伝達ギア比
2.4
1/4分割 32 pps
1/8分割 64 pps
1/16分割 128 pps
②速度について
DOG NS-5000PK264A2NJP 2A出力(モータ電流)
電源12V 1/16分割 128 pps 420倍速 で自動導入ができています。
DOG NS-5000PK264A1NJP 1A出力
現在のところ確認していませんが、(2010,6/29)を参考にして下さい。
PX243G01-02A トルク8Kgcm 低速用モータでRA 150倍、DEC 200倍が出ています。
PK264は高トルク、高速用モータです。
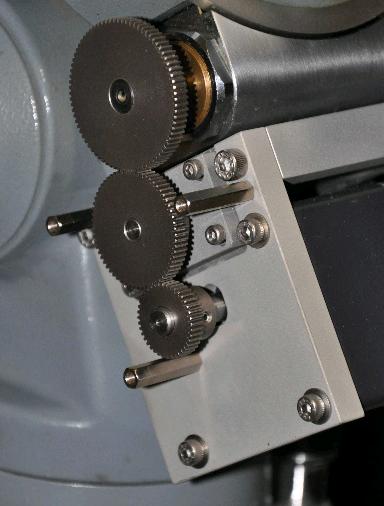
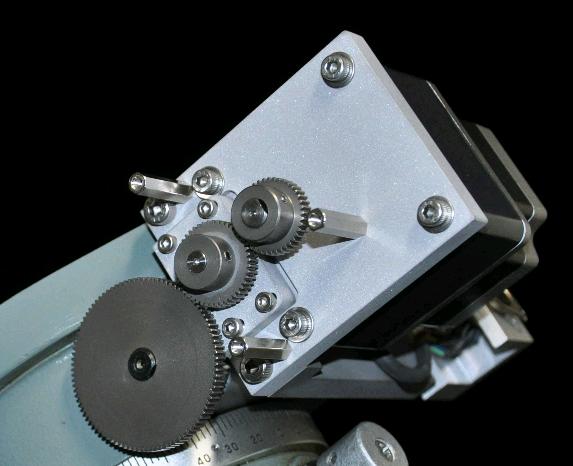
③ギア(平歯車)の材質と強度
PK264A2-SG7.2の出力トルクは、2A出力で約20Kgcmあります。(1A出力は約10Kgcm)
さらに、伝達ギアにより赤道儀には約40Kgcmの大きなトルクがかかります。
そこで、モータユニットの平歯車として、真鍮に比べ約5倍の強度があるS45C(炭素4.5%含有)を選びました。
精度は、真鍮:旧JIS5級に対し、S45C:旧JIS4級とアップしています。
 |
 |
 |
ギアの防錆処理は、標準で無電解ニッケルメッキを行って解決しています。
また、オプションで、高品質の無電解ニッケルテフロンメッキにも対応できます。
無電解ニッケルテフロンメッキは防錆とテフロン樹脂分による固体潤滑が同時に出来ます。
ギアには非常に大きなトルクがかかっていますので、安全対策としてカバーを付けました。
カバーは、0.5mm厚のアルミ板で形を作り、ガラス繊維で補強してから塗装しています。
オプションで、カバーの色を指定することができます。
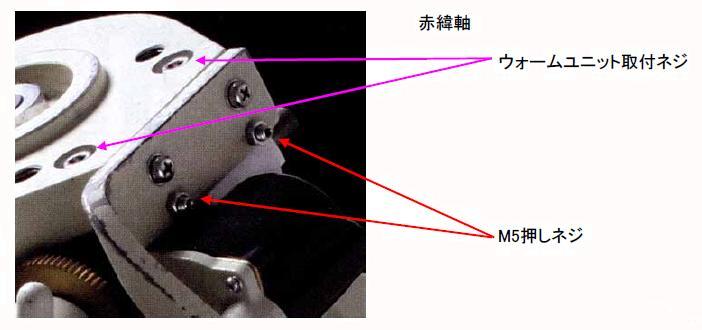
④赤道儀のウォームネジユニットの押しネジについて
ウォームネジの当たりはバックラッシュ、ピリオディックモーションに影響を与えますので、慎重に微調整する必要があります。
PK264モータユニットでは、タカハシの純正(PD-6XY)モータと全く同じ方法をとりました。
つまり、押しネジの取付位置、取付方法は純正モータと同じです。
PD-6XYと同じ様に微調整することができます。
押しネジを設けるために、PK264モータユニットは15mm厚のアルミ板を使いました。
(文章だけでは分かりづらいので、星ナビ 2008年、特集記事より 写真を引用させて頂きました)
(2010,8/17)
■原村星まつり NS-5000PK264
モータユニットの実演、展示について、ご報告を頂いています。
お客様から貴重なご意見をいただきました。とても参考になります。一部ですがご紹介します。
この度は(有)ギガオプト様にお世話になりました。
社長様は光学的知識に精通されておられますので、望遠鏡等のご相談はギガオプトさんも加えてご検討いただければ幸いです。
また、天文ガイド誌に広告を掲載されています。
10月号ではDOG NS-5000をお取り上げいただいております。この場を借りてお礼申し上げます。
1.動作スピードについて
最高速のスピード設定は赤経・赤緯ともNo40の420倍速で行いました。
お客様の感想は「お、速いね」とか「結構速いですね」とか「これだけあれば充分」等の
好意的なものが殆どでした。
2.動作音について
最高速X420倍での動作音を聞いて頂きました。
お客様の感想は「静かだね」「静かですね」「良い音だね」「品がある音だね」とか多少の
お世辞もあると思いますが好意的でした。
3.外観について
PK264-SG7.2という大きなモータを載せているので外観面で邪魔とか言われるかなと
思いましたが、意外と「モーター大きいね」「パワーがありそう」等好意的でした。私からは
12V電源で、安定して回したいので通常使われるモーターの1ランク上のモーターを工夫
して載せていますと説明しました。
モータユニットを約1kgのカウンターウェイトとしてご利用いただけるでしょう。
また、PK264-SG7.2は、出力トルクが約20Kg・cmもあり、大型赤道儀にも最適です。
4.その他
①ギアの表面処理について
無電解ニッケルテフロンメッキによる固体潤滑を説明すると大半のお客様が「埃が着かなくて
いいね」と好意的でした。中には「高そうだな」といった意見もありましたので、やはりオプション
扱いが妥当かと思います。中には「特殊メッキは信頼性面で大丈夫なの」といった一歩踏み
込んだ意見もありましたので「半導体製造ラインの機器に使う為に開発されたものです」と
回答すると合点がいったようでした。
②ギアカバーについて
カバーがあるのはとても良いというのが総評です。
「削り出し?」と聞かれるお客様が多かったにビックリしました。「いえ張りボテです」というと皆さん
まじまじと眺め。「アルミの曲げ物をガラス繊維で補強したものです」と説明すると意外だったらしく
叩いて音を聞いていかれる方もおりました。
③操作ボックスについて
既にNS企画様の製品をお使いになられていて「操作ボックスのボタン位置が判りずらいんだよな」
と言われたお客様が数名おられました。方向キースイッチの形を変えるか位置を非対称にするか
キーの中心部に目印の突起(ネジか何かでOKだと思います)を追加するか必要だと私も感じました。
実は夜、試運転中にコントロールボックスを扱っていると速度キーを間違ってよく押してしまいます
操作性は各個人の感覚的なものが大きいとは思いますが何かしらの改善をしたほうが良い気が
します。
ハンドボックスのサイズ、スイッチの配置など再検討したいと思います。
■(N)JP赤道儀用
NS-5000PK264 モータユニットの価格方針はほぼ決まりました。
近日公開します。
(2010,8/6)
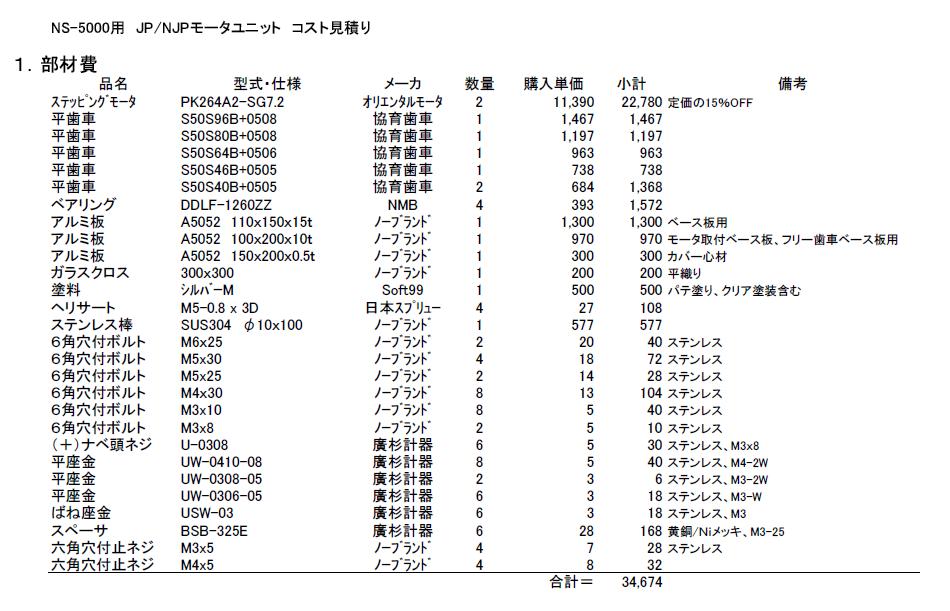
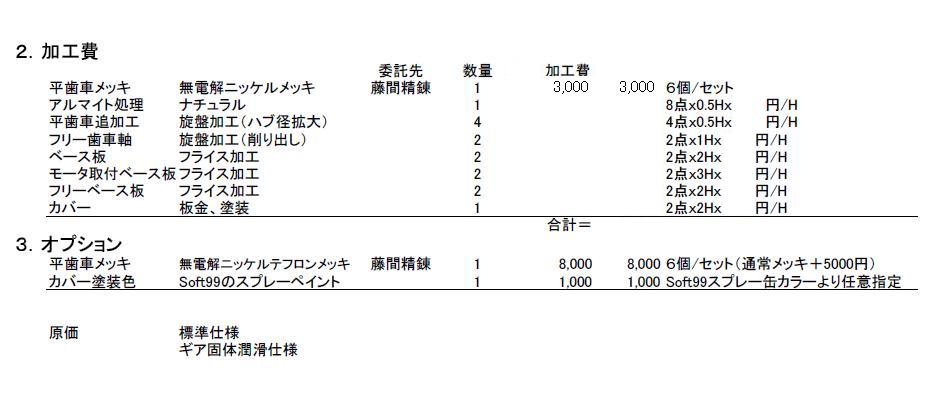
■(N)JP赤道儀用 NS-5000PK264
モータユニットの価格について検討しています。
なるべくお求めやすい価格を目指しています。参考までに、価格検討資料を公開します。内容は正確です。
(2010,8/5)
■開発中の (N)JP赤道儀用
NS-5000PK264 モータユニットが完成しました。
NJP赤道儀用として高精度、高信頼性、高安全性を目標として開発しました。
■2010(17回)サマーホリデーin原村星まつり で(N)JP赤道儀用
NS-5000PK264 モータユニットを展示、実演する予定です。
(有)ギガオプト様 のブースにて、NS-5000PK264
モータユニットが展示されます。
また、DOG NS-5000(特別限定品)などの販売も予定しています。
星祭りに参加されるお客様はぜひご覧いただければ幸いです。

(2010,7/19)
■復元用初期化データを用意しました。(DOG_BACKUP.tcl で作成しました)
NS-500/5000をお持ちのお客様はご利用下さい。
観測地情報以外のほとんどのデータを初期化して元の状態に復元できます。
マイクロステップ、赤道儀の切替えなどにご利用頂けます。
EM10,EM200につきましては、モータの回転方向が合っていない場合があります。
その他はお客様のご協力で問題ないことを確認しています。
配布用 NS5000初期化データ.lzh
お気づきの点がありましたら、お知らせ頂ければ幸いです。
■TheSky 英語版(Ver5.00.004)と日本語版(Ver5.00.011)に、コマンドの違いがありました。
正常に動作しないというお客様からのご依頼で調べて分かりました。
どちらもコントロールシステムとして「LX200 by
Mead Instruments Corp.」を選択して調査しています。
専用のRS232Cアダプターを作って通信内容を調べました。
日本語版は問題ありませんが、英語版の方で時々初期設定ができないことがありました。
詳しく調べたところ、特定の赤経値の場合に発生していました。
症状は、赤緯は正常で、赤経位置が不規則にズレました。
以下は初期設定時に、日本語版、英語版のTheSkyがNS-5000に送信したコマンドの内容です。
座標は低精度です。高精度表示については未確認です。
日本語版(Ver5.00.011)
座標 送信コマンド
RA 05h05m54.009s > Sr 05:05.9#
DEC -22°21'17.418" > Sd -22*21#
RA 05h01m52.637s > Sr 05:01.9#
DEC -20°02'05.130" > Sd -20*02#
英語版(Ver5.00.004)
座標 送信コマンド
RA 05h05m54.007s > Sr 05:5.9# コマンドエラーが発生した
DEC -22°21'17.433" > Sd -22*21#
RA 05h01m52.635s > Sr 05:1.9#
コマンドエラーが発生した
DEC -20°02'05.143" > Sd -22*02#
赤い部分がコマンドが異なっている所で、このフォーマットの違いが、DOG側でコマンドエラーと判断され、初期設定が成功しなかった原因だと思います。
この様なフォーマットの違いは、今までにも色々ありました。その都度解決してきたのですが、今回のTheSkyは予想外でした。
コマンドフォーマットは、星図ソフトや (ASCOM)ドライバーにより、少なからず違っているのが普通です。
以上は、現在進めているバージョンアップで解決する予定です。
(2010,7/18)
■32ビットマイコン SH7125を用意しました。これにNS-5000システムを移植したいと思います。
現在のCPUが廃止される心配は無いと思いますが、念のため、せっかくですから32ビットCPUに移植しておきます。
また時間が経てば経つほど困難が予想されますので、今から準備を始めます。
32ビットCPUマニュアルをざっと目を通しましたが、またしばらく根気と忍耐が必要になります、気が滅入ります。
しかし、このマイコンは相当なパフォーマンスがあり、移植が完了したら、いろいろな可能性が生まれると思います。
移植はNS-5000と同様に、アセンブリ言語をベースにして、C言語は必要最小限にとどめます。
現状のDOGは、
PIC24F
16ビット RISC マイコン 16MIPS 32MHz ROM
64KB RAM 8KB
これに対して、
SH7125(ルネサンステクノロジ)は、
32ビット RISC マイコン 65MIPS 50MHz ROM
128KB RAM 8KB
簡単には比較できませんが、処理能力はかなりパワーアップします。
例えば16ビットではギリギリ動作していた超高速導入でも、32ビットは余裕で処理できるようになります。
STAR BOOKでARM7が使われているそうですが、だいたいそれと同じレベルの基本性能があるでしょう。
下、右側がSH7125 CPUボードで、左がプログラムを書き込むライター基板です。
SH7125 CPUボードはご覧のように小型です、NS-5000基板に余裕で搭載できます。

(2010,6/29)
■オリジナルDOGを制作されたお客様から動作確認のレポートをいただきました。
とても重要なデータだと思いました。
今後の開発に役立ちます、また、お客様の参考にもなりますので、ご紹介させて頂きます。
(2010,4/2)「無負荷の状態で、NS-5000最高速度のテスト 1/2分割」 が参考になります。
NJPモータは、DOG NS-4/12で作ったハイブリッド型モータで、以下の2種類ありました。
1 高速用 >> PX243G01-01A トルク8kgcm 電流0.6A/相 電圧4V
巻線抵抗6.7Ω/相
2 低速用 >> PX243G01-02A トルク8kgcm 電流0.25A/相 電圧9.6V
巻線抵抗38.4Ω/相
赤道儀には低速用を付けて動作確認されています。
それからモータはハイブリッド型ですが、ビクセン MT-1(PM型、電流0.3A/相)よりも低電流です。
「NS企画 西岡様
ようやく最高速&自動導入の動作確認ができました。
結果の前に私のNJPシステムの様子をお知らせします。
画像N0009sを御覧頂くと分かると思いますが搭載重量にかなり無理があると思います、
ORION30cmニュートン+BORG125ED+ガイドマウント&BORG77ガイド鏡
さらに補強フレーム 等を搭載したため、ウエイトは延長した上に高橋製×3+ダンベルプレート×2
でバランスを取っています、動作確認はこのように無理をしたNJPでの結果となりますので最高速の数値を
判断する上での参考に願います。
重量に関してはきつい条件ですが気温は逆に緩い条件となります、このところの暑さでNJPの回転は
冬場に比べてかなりスムーズです、この点も数値判断では重要と思います。
それでは確認結果ですが、条件として
NS-5000設定
電源 DC24V 4.5A
マイクロステップ4分割
加速パルス $50(16進 RA・DEC)
減速パルス $0A(16進 RA・DEC)
モーターPX243G01-02A(NS-4低速用)
気温 23℃ において
DEC最高速 250倍(スピードテーブルの最大値、もっと上でもOKそうです)
RA 最高速 215倍
となりました、ただしあくまでも脱調しないで回っている速度です、RA
側は鏡筒に触れて少し力を
加えると脱調してしまいます。
そこで、実用的な最高速を私個人の判断で以下の通りに設定しました。
DEC最高速 200倍
RA 最高速 150倍
あくまでも夏場の最高速です、**内陸部の冬(-10℃)には当然もっと低い設定でないと
使えないことは容易に想像できます、しかしながら低速用モーターでこの最高速を達成できたことは
やはり驚きです、優秀なハードと性能を最大限に引き出すソフトがうまく調和した結果ではないかと思われます。
自動導入の結果もお知らせしておきます、NS-5000の設定は最高速確認時のままです。
星図ソフトは「Cartes du Ciel」です。
ベガで初期位置を設定して視野中央
↓
デネブ導入 5′程度のずれ有り
↓
アルタイル導入 10′程度のずれ有り
↓
ベガ導入 ほぼ中央
この後 各星を逆にたどってもほぼ同じ結果となりました、微妙にずれが発生しているように
見えますが、規則性のあるズレ方をしているので極軸のズレやたわみが原因ではないかと思います。
ズレの方向・量を詳しく検証することで極軸のズレ等を修正できそうな気がします、今後の課題です。
以上で確認報告を取りあえず終了します、冬になって設定を大きく変更した時などはまた報告
させていただきます。」

画像N0009s |
|
(2010,6/27)
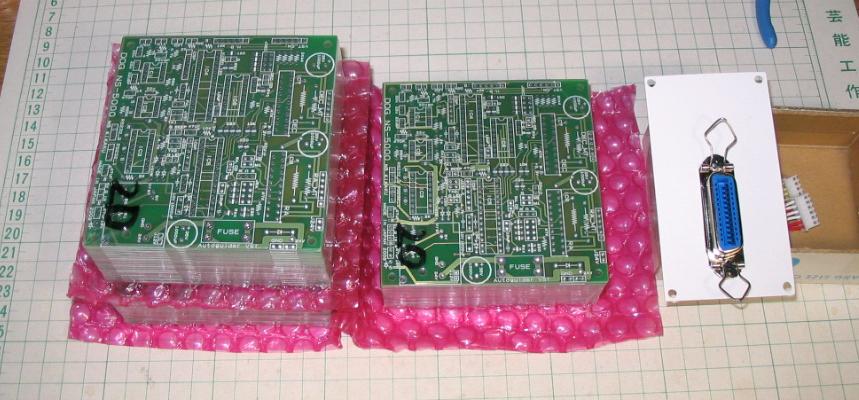
■NS-5000 CPUボードの在庫がなくなったので少し多めに作りました。
右の白いパネルはEM10用です。コネクタは旧アトラクスと同じアンフェノールコネクタを使っています。
パネル裏に電池が2本付いており、コネクタを挿し込むと、極軸ランプが点灯するようにしています。
(2010,6/19)
■ご注文頂いていたDOG
NS-201/5000の製作が、だいたい終わりました。
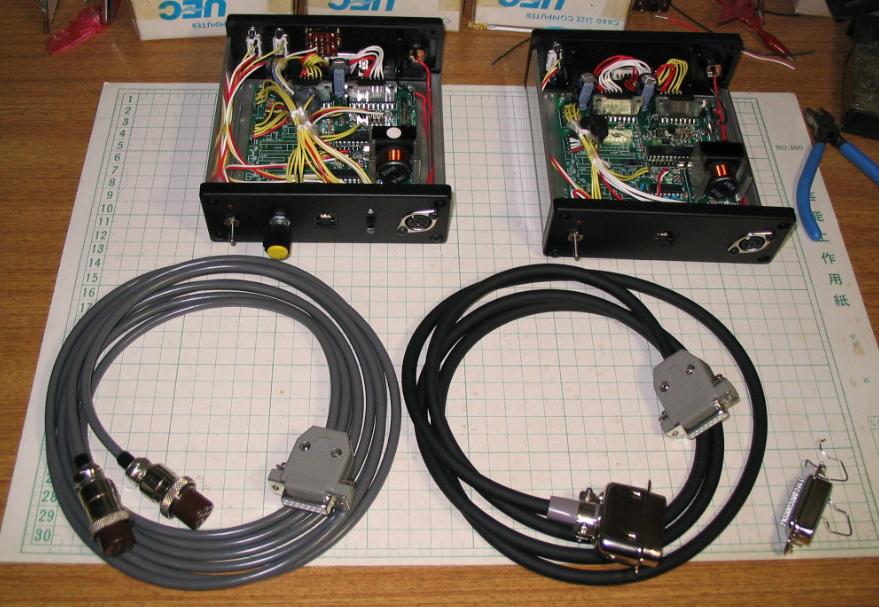
左から、旧アトラクス、EM10/NJP(PD-6XY) の3機種の赤道儀対応NS-5000、右がGPD用NS-201です。
手前のモータ接続ケーブルは、左からPD-6XY用、旧アトラクス用です。それからEM10赤道儀では、パネルに旧アトラクスと同じコネクタを付けて、ケーブルを兼用できるようにします。
■オリジナルDOGを制作しているお客様から、NS-5000完成写真が届きました。
素晴らしい出来栄えです。
(2010,6/9)
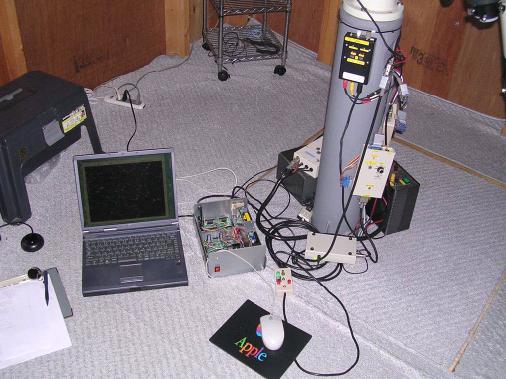
■お客様から製作中のオリジナルDOG
NS-5000の写真をいただきましたので、ご紹介します。
古くからのお客様でご職業は技術関係のお仕事をされています。今回は特別な例外としてCPUボードを提供していました。
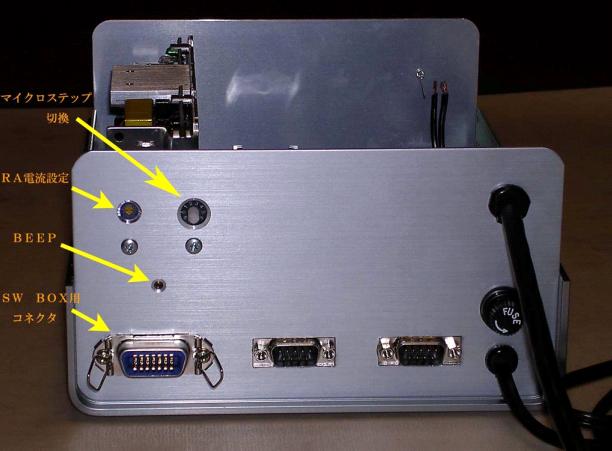
写真について、
「電源は将来モーターを変更することを考えて24V 4.5Aです。 ケースも大きめです、自作回路などを組み込むスペースを取っています。」
「マイクロステップ切換 等は裏側に持ってきました、たぶん最適な設定が見つかれば 動かさないだろう・・・、と考えた結果です、SW BOXのコネクタはこの形です、NS-4NJP 導入以前から現在までこれを使っています、SW信号以外にも12V電源などが 入っています。」

 |
 |
(2010,6/1)
■この度スターベース(東京秋葉原)でDOGをお取り扱い頂ける事になりましたので、お知らせします。
しばらくの間、DOGのテストをお願いしていましたが、タカハシ・スターベース様のご了解をいただきました。
さしあたって手間の掛からない NS-501GP の販売をお願いしています。
DOGがどの様なものか、直接確かめていただければ幸いです。
またお客様のご希望があれば、実際に動かしていただけるそうです。
展示のDOGは最高速度を140倍速に設定しています。
GPD赤道儀が140倍速で動くのを見てください。その速さに驚かれると思います。

(2010,5/30)
■注文していたEM200,EM200USD用赤道儀パネルが出来上がってきました。
材質は2mm厚ステンレス板(ヘアーライン研磨のつや消し)で作りました。
強度、品質も申し分ないですが、少々重たい感じです。次回はオーソドックスなアルミ板でやってみます。

右端の汚いパネルはEM10用の見本として使ってきたものです。
DOGとの接続はDIN コネクターを使い、極軸ランプ点灯用にスライドスイッチが付いています。

■タカハシ製品をお取扱できるようになりました。
よろしくおねがいします。
(2010,5/23)
■ご注文頂いていた旧アトラクス+SP/DX用 NS-5000の製作が、今日だいたい終わりました。
明日か明後日には発送できる予定です。
結構配線が多く手間がかかるのですが、何度も繰り返していると大分上手になったと思います。
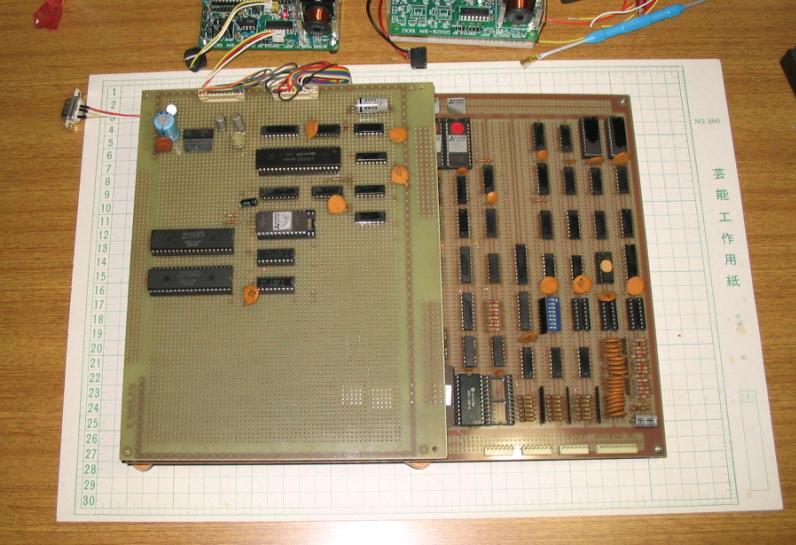
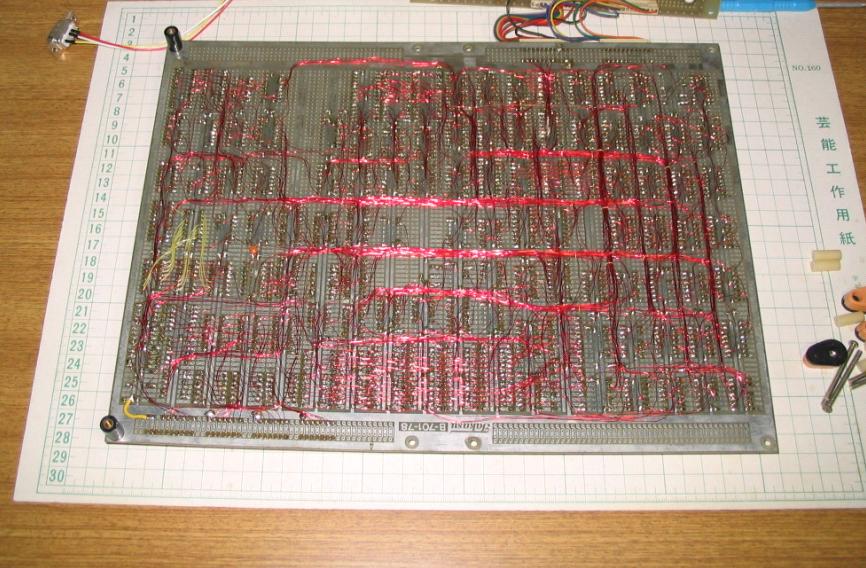
■天文には全然関係ないですが、昔、天文以前にやっていたTVゲーム機(試作基板)をご紹介します。
あるゲーム機をベースにして、Z80 CPUを1個から2個に増やし、一般的にスプライトと呼ばれる8個のキャラクタ(ハードウエアで画面表示されるもので、ロケットや爆弾などを表示するのに便利です)を15個に拡張したものです。かなり努力した記憶があります。
当時ではそれなりパフォーマンスのあるゲーム機だったと思います。
しかし、今ではせいぜいファミコンかゲームボーイぐらいのパフォーマンしかありません。
いろいろと思い出のあるものですが、機会を見つけてサイトでご紹介したいと思っています。

(2010,5/19)
■(N)JP赤道儀用 NS-5000PK264ご利用のお客様から、(赤道儀は、2010,3/16をご覧ください)
オートガイダーVST(Ver3.1,本体実装タイプ)の撮影レポートを頂きましたので、ご紹介します。
お客様には(N)JP赤道儀用 NS-5000PK264 モータの開発において多大なご協力を頂いています。
ガイド鏡の焦点距離≒1000mmは、意味があるように思います。
通常オートガイダーVSTでは、ガイド鏡の焦点距離は主鏡の約1.5倍程度をお勧めしていますが、
今回は主鏡VAISAC(1800mm/F9)に対し1000mmです。
「まだまだ拙いですがM13とM27をVSTによるオートガイドで撮影した写真
を添付します。
機材は前回同様で
鏡筒:VAISAC(1800mm/F9)直焦点
カメラ:Nikon D90(ノーマル)
ガイド鏡:Nikon 60mmEDフィールドスコープ
(改)/焦点距離≒1000mm
ガイドCCD:B05-3M
星 図ソフト:SUPERSTARⅣ/MEAD LX200で設定
M13:ISO1600 露出3分x4枚 コンポジット
M27:ISO1600 露出3分(一発撮りです)
なお、JP赤道儀の極軸はVSTの機能を確認するため若干(多分0.3度程
度)狂わしています。
赤緯ギア比2.4のスピードデータありが
とうございます。
メカ部がまだ出来ていませんので(まだ設計中です。農繁期ですので休日の時間がとれず
進みが鈍いです)確認にはお時間を下さい。
VSTの動作確認ができVAISACの直焦点で初めて3分間露出をし星がながれませんでした。 ノーマルカメラでノーフィルタですが予想以上に写っているのに感激しました。」

M13
|

M27
|
それから、オートガイダーVST Ver3.1は、改良のためDOG本体に実装することは中断しています。
当面はハードウエアの改良が一段落するまで、従来のVST
Ver3 で対応していきます。
■NS-5000 EM200,EM200USD 用として赤道儀パネルを製作しています。近いうちにご案内できると思います。
(2010,5/16)
■開発中の (N)JP赤道儀用
NS-5000PK264 モータの続きです。
(N)JP用モータとして、できるだけ良いものを目指して開発を進めています。
モータの製造は外注で行います。以下の文章は技術者からのメールです。
ギアの材質として、赤道儀の駆動テスト(2010,4/15,4/2)から相当なスピードが出たという事、
また、実際の観測ではかなりの搭載重量も予想されますので、当初真鍮の予定からS45Cに変更しました。
材質:S45Cモジュールは、
「真鍮に比較しS45C(炭素4.5%含有の鉄で焼入れは無)は約5倍強度があるようです。また、歯車の
精度も真鍮:旧JIS5級に対しS45C:旧JIS4級と精度もアップします。価格は同等です。
ステンレス製は値段も3倍以上高く精度も旧JIS5級ですのでS45Cがベストのようです。」
しかし、S45Cモジュールは長所ばかりでなく欠点もあります。鉄が主成分ですから錆がでる可能性があります。
そこで、ギアの防錆処理と潤滑(安全のためにギアカバーを付けます)の対策として、以下を検討しています。
1 無電解ニッケルメッキ
2 グリス
3 無電解ニッケルテフロンメッキ
「無電解ニッケルテフロンメッキは防錆とテフロン樹脂分による固体潤滑が同時に出来る優れものです
のでコストにもよりますが是非とも行いたい表面処理です。」
「電解メッキではメッキ槽電極に対しての位置関係で電流集中等が起こりメッキ厚が均一にならな
いらしいです。
無電解だとニッケルメッキが一般的で低コストです。」
「なお、無電解ニッケルメッキ品ではグリース潤滑が必要です。」
実際に、無電解ニッケルテフロンメッキを行いました。

上 赤緯ギア 、下 赤経ギア
(2010,4/28)
■お客様から旧アトラクス、EM200USD用の2機種対応のNS-5000をご注文いただきました。
赤道儀切替スイッチの他に、マイクロステップ切替スイッチ、赤経カレントダウン調整ボリューム(恒星時の出力トルクを可変)も取り付けています。ようやく本体の製作ができました。ご紹介します。
 |

|
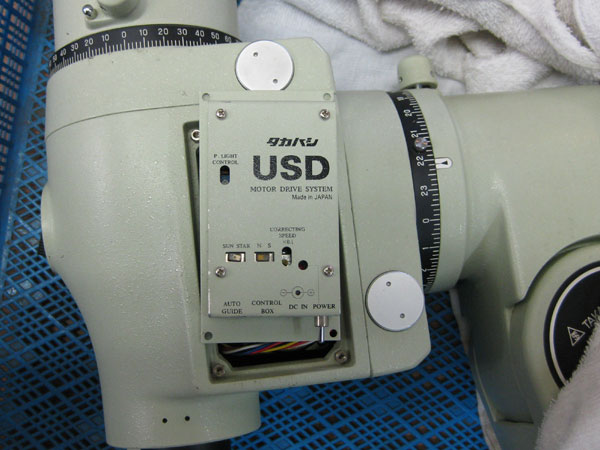
お客様からEM200USDの詳しい写真を送っていただきました。それも合わせてご紹介します。
EM200USD赤道儀をNS-5000で動かしたら、どれぐらいのパフォーマンスが出るか非常に興味がありました。
今から楽しみです。結果が出ましたらお知らせします。写真をご覧いただくと分かると思いますが、USD用にパネルを作り、アンフェノールコネクタ(旧アトラクスと同じ物)を付けて、NS-5000と接続することになります。したがって、モータ接続ケーブルは旧アトラクス用を兼用することができます。
 |
 |

■それから、現在(N)JP赤道儀
NS-5000PK264用として、高品質、高精度を目標にして(N)JPモータを開発しています。一部データを公開します。
検討中のギアの写真です。
(上)真鍮/モジュール:0.8 (下)材質:S45C(炭素4.5%含有)/モジュール:0.5

赤経軸側のギアトレーン図面(構想)
(2010,4/15)
■(N)JP赤道儀 NS-5000PK264A2 をご利用いただいているお客様から新しいデータが届きました。
前回のテストでは(2010,4/2)、1/8,1/16のいずれも用意したスピードデータの上限×250まで達して、最高速度のテストが出来ませんでした。
そこで高速版のスピードデータを作り、ふたたびお客様のご協力を頂いて、本当のNS-5000の実力を調べることができました。
テストした(N)JP赤道儀 NS-5000PK264A2 は、以下の恒星時速度に設定されています。
赤経 PK264A2-SG7.2 、減速ギア比7.2:1、伝達ギア比2:1、ウオームギア240:1
赤緯 PK264A2-SG7.2 、減速ギア比7.2:1、伝達ギア比2.5:1、ウオームギア144:1
マイクロステップ分割数と恒星時速度は、(pps)
1/4 ..赤経=32.087 ..赤緯=24.066
1/8 ..赤経=64.177 ..赤緯=48.132
1/16 赤経=128.353 赤緯=96.265
高速バージョンの初期化データ
(1/16分割、恒星時128pps)
(基本クロックを250KHzから2MHzに切り替えました、250KHzに戻す時はこちらを参考にして下さい)
今回は、スローアップ、スローダウンするために、加速パルス(増速)、減速パルス(減速)を設定しました。
これは非常に効果的で、この設定が無いと高速駆動は難しいでしょう。
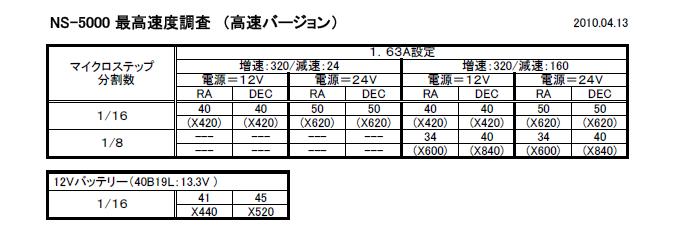
■1/16分割で赤経、赤緯ともに、電源24Vでx620倍速で動作しました。
この時、赤経は80Kpps、赤緯は60Kppsで動作しています。これは極めて高速だと思います。
80Kppsは、12.5us(マイクロ秒)毎にステッピングモータ駆動信号を出力します。
したがって、この時間内に、必ず1ステップ処理を完了させなければなりません。
つまり、1ステップごとに正転、逆転、加速、減速、バックラッシュ補正、カレンドダウン機能、そして赤経と赤緯の座標計算など、複雑なプログラム処理を行う必要があります。
これらの1ステップ処理時間の合計は、必ず12.5us(マイクロ秒)以下でなければ、連続してモータを駆動できません。
また、1ステップ処理は赤経と赤緯で同時に行われますので、条件はより厳しくなります。
これは32ビットCPUを使っても達成するのは難しいと思います。
■それから、電源24V 1/4分割で以下の最高速度を確認しました。
赤経 680倍速
赤緯 1120倍速
(2010,4/8)
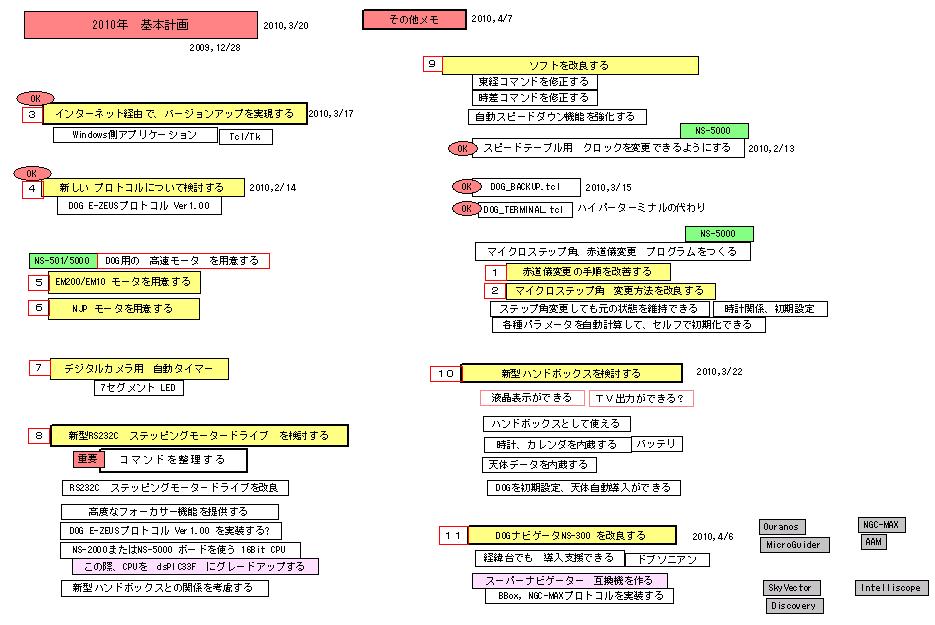
■今年の計画は、新しい目標を加えて以下のとおりです。
・新型ハンドボックスを検討する
・DOGナビゲータNS-300を改良する
これまでは赤道儀専用でしたが、これを経緯台(ドブソニアンなど)でも使えるように改良したいと思います。
また経緯台もASCOM対応のために、MicroGuider、スーパーナビゲーター・・・のプロトコル(コマンド)を実装できないか検討しています。
■旧アトラクス赤道儀用 DOG
NS-5000ATLUX(中古)をこちらに出品しました。
ご検討いただければ幸いです
(2010,4/2)
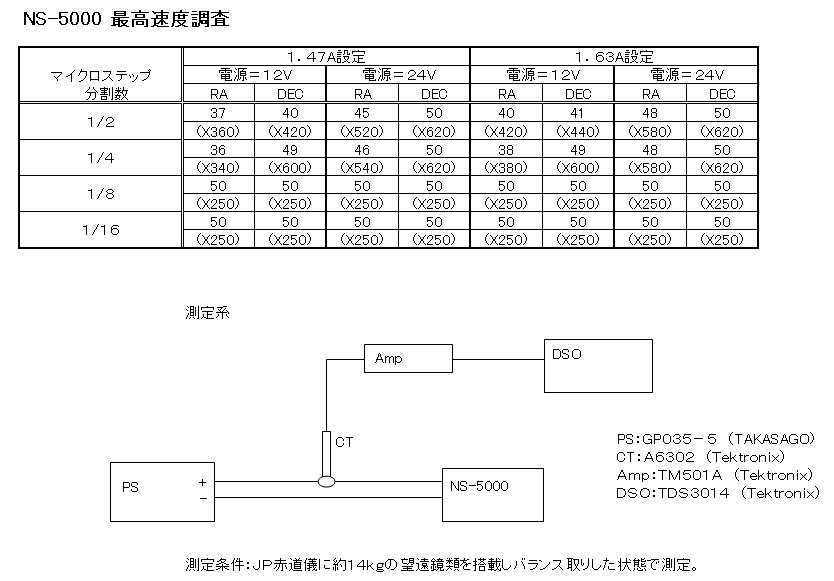
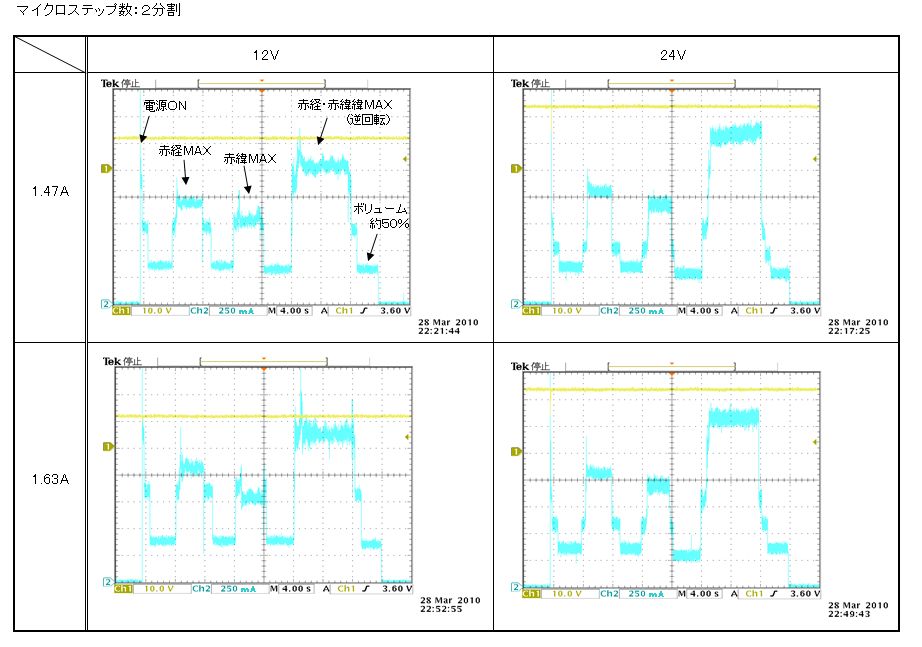
■(N)JP赤道儀 NS-5000PK264A2 をご利用いただいているお客様から貴重なデータが届きました。
赤道儀、モータ、トルク、マイクロステップ、導入速度・・・を検討するうえで大変興味深い内容です。
一部ですがご紹介します。赤道儀モータは(2010,3/16)をご覧ください。
お客様は技術関係のお仕事をされています。本格的な方法と設備によるデータです。
スピードデータの上限は、1/2,1/4は赤経、赤緯×620
、1/8,1/16は×250まで設定しました。
1/8,1/16ではいずれも×250まで達しましたので、後日あらためて最高速テストをお願いする予定です。
1.47A,1.63Aはモータの駆動電流で、電流と速度の関係がわかります。
ちなみに、PK264A2は最高2Aまで可能です。したがって、今回はモータ出力(トルク)を控えめにしています。
以下の状態で測定しています。
「JP赤道儀には実際の使用を想定しガイドスコープ+ガイドマウント+VAISAC+ベースプレートで総重量約14kgを搭載しています。」
「電源は高砂製作所の5Aシリーズ方式のDC可変電源で電流リミット値は5Aにセットしています。
電流測定はカレントプローブを使いオシロスコープで測定しました。」
■先日DOG NS-4NJP から
NS-5000 へグレードアップのご注文をいただきました。
モータはNS-4/12NJP用として2種類があり、今回は低速用の方でした。
このモータは SHギヤードタイプPK243シリーズ と互換性があります。
1 高速用 >> PX243G01-01A トルク8kgcm 電流0.6A/相
電圧4V 巻線抵抗6.7Ω/相
2 低速用 >> PX243G01-02A トルク8kgcm 電流0.25A/相 電圧9.6V
巻線抵抗38.4Ω/相
減速ギア比 1:18
無負荷の状態で、NS-5000最高速度のテスト 1/2分割
電源12V
赤経 最高速 ×110 3.5Kpps
赤緯 ×185 3.7Kpps
電源24V
赤経 最高速 ×210 6.7Kpps
赤緯 ×250 5Kpps
(最高×250までの設定だったので、実際は300倍速近くまで延びている可能性があります)
後日実際のNJP赤道儀の結果が分かりましたらご紹介します。
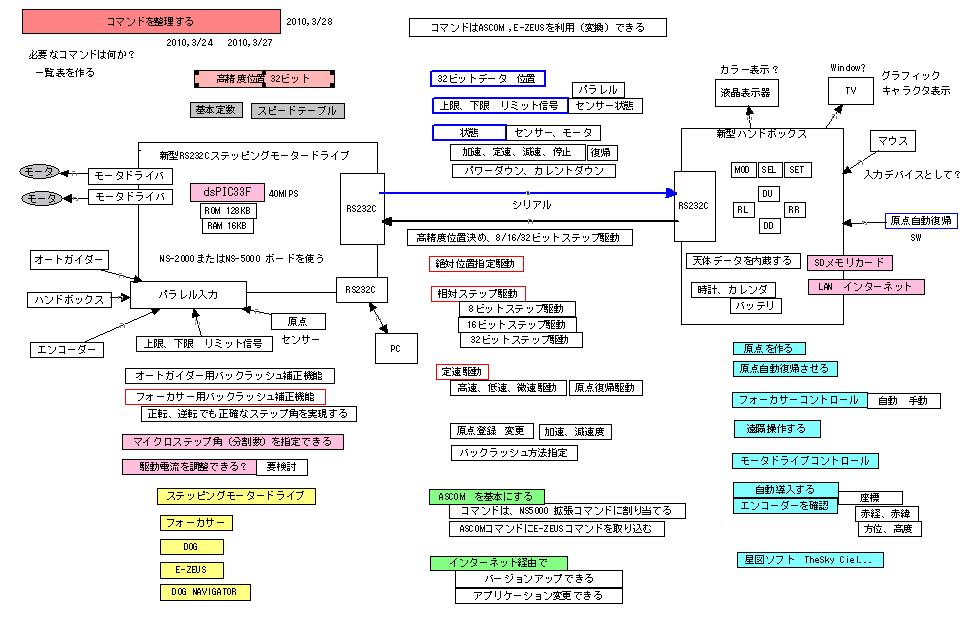
■今後の開発計画として、新型RS232Cステッピングモータドライブについて検討しています。
これは、基本的なステッピングモータドライブ機能の他に、フォーカサー、DOG、E-ZEUS互換機・・・などと関連性も深くいろいろと可能性のあるシステムだと思います。ご意見ご希望などメールをお願いします。大変参考になります。
(2010,3/20)
■DOG用の送信プログラムを作りました。ハイパーターミナルの代わりにご利用ください。
NS_KIKAKUフォルダにコピーしてください。初期化データの送信に便利でしょう。
DOG_TERMINAL
それからプログラムは、TclProとVisual Tclで製作しています。http://sourceforge.net/projects/vtcl/files/
Visual Tclはかなり強力な開発環境だと思います。プログラムの改造、再配布は自由にしてください。
(2010,3/18)
■ようやくインターネット経由でバージョンアップができるようになりました。
USB-RS232C変換ケーブルの問題は解決しています。
繰り返しバージョンアップを行い、問題ないことを確認しました。
DOG NS-5000 Ver4.15 バージョンアップソフトを公開します。
このソフトはNS-5000専用になります。
以下の3つのファイルをダウンロードして、NS_KIKAKU.lzhで作成した、NS_KIKAKUフォルダにコピーしてください。
バージョンアップは versionup_readme を確認しながら進めてください。
NS5000_versionup_TEST_3_17_10.lzh
versionup_readme.lzh
DOG_NS-5000_V4_15_3_17_10.lzh
Ver4.15に関するご質問はメールでお願いします。
また、ご感想をいただけますと大変参考になります。
(2010,3/16)
■ユーティリティソフトを公開します。ご利用いただければ幸いです。
詳しくは添付のreadmeをご覧下さい。
NS_KIKAKU.lzh
DOG_BACKUP.tcl
DOGを調べて、設定情報、復元用の初期化データファイルを自動生成します。
マイクロステップの初期化、赤道儀の切り替え、システム復元などに便利です。
このソフトは、DOG NS-100/200/201/500/501/5000でご利用いただけます。
NS-5000 Ver4.15のバージョンアッププログラムを製作しましたが、USB-RS232C変換ケーブルを利用すると、上手く動作しない事が分かりました。現在解決を目指して検討しています。
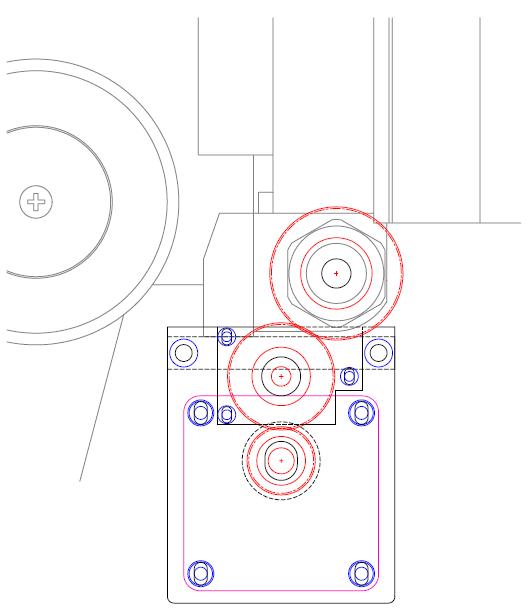
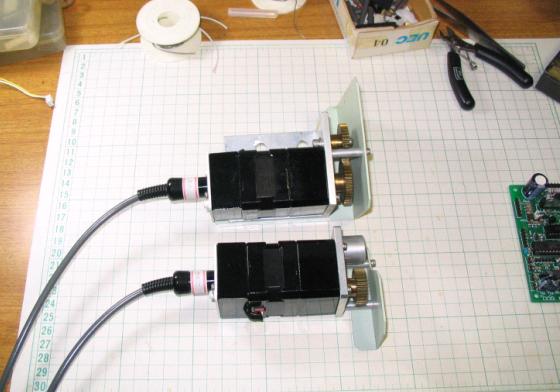
■ (N)JP赤道儀NS-5000PK264A2 お客様から新しい写真が届きました。
赤経、赤緯モータともに素晴らしいできばえです。

|
 |
ホームページの製作編集は、今日から、少々古いですが、FrontPage
Expressに変えました。
(2010,2/16)
■DOG E-ZEUSプロトコル Ver1.00の開発は一段落しました。
このプロトコルは、NS-5000 Ver4.15に実装しますが、今後の開発計画もあり、参考機能として扱います。
そのため都合によっては、削除することがあります。
参考機能ですが、DOG E-ZEUSプロトコルは実用的なシステムまで改良します。
まだバグが残っている可能性がありますが、バージョンアップで解決する予定です。
それからバージョンアップは、次の目標となりますが、サイトからプログラムをダウンロードして、
お客様の手できるようにしたいと思います。
「3番 インターネット経由で、バージョンアップを実現する」(2009,12/28)をご覧ください。
NS-5000 Ver4.15バージョンアップ・プログラム をサイトに登録する予定です。
暫くお待ちください。
■お客様からのメールで、TheSkyからE-ZEUS用ASCOMドライバーの接続方法が分かりました。
モータコントロール、自動導入とも問題なくできました。とても快適でした。
■DOG NS-5000とE-ZEUSプロトコル 切換えコマンドを作りました。
E-ZEUSプロトコル (E-ZEUS SYSTEM)は参考機能です。将来削除する可能性があります。
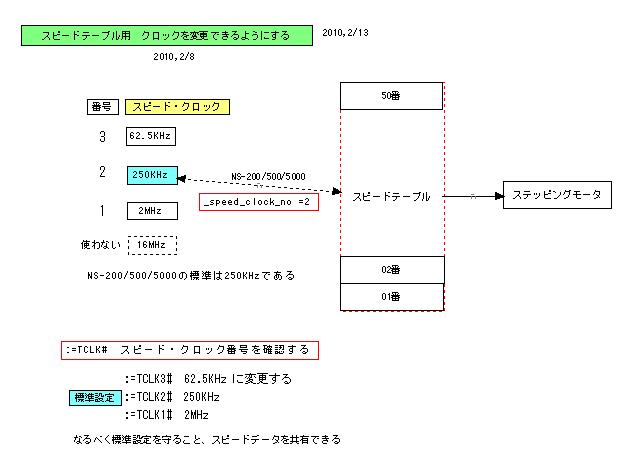
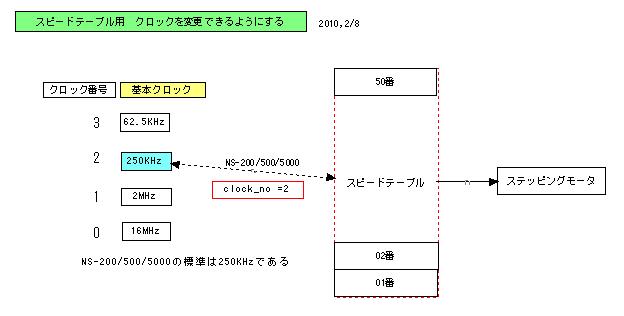
■NS-5000 Ver4.15 スピードテーブル用クロックが変更できるようになりました。
3種類のクロックを利用できます。標準は250KHzですが、コマンドで変更できます。
この機能は高速マイクロステップ駆動に効果があるでしょう。
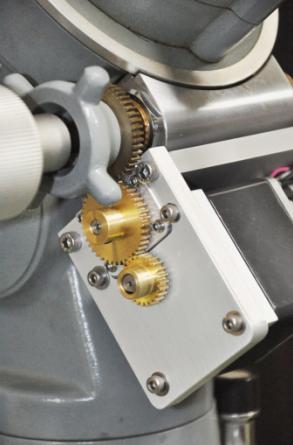
■ (N)JP赤道儀NS-5000PK264A2 お客様から製作中のモータ写真を送って頂きました。
JP赤道儀にオリエンタルモータPK264A2-SG7.2を使っています、素晴らしい完成度です。

|
|
(2010,2/12)
■新しいプロトコル(コマンド)の続きです。
E-ZEUS用ASCOMドライバーによる、Cartes du Ciel 自動導入の様子(動画)を公開します。
NS-5000 Ver4.15、E-ZEUSプロトコルVer1.00はあと少しで用意できます。
(2010,2/11)
■新しいプロトコル(コマンド)の続きです。
・最近になり、E-ZEUS用のASCOMドライバーが公開されました。「ASCOM Telescole Driver for E-ZEUS」(フリーウエア)
試しに、こちらのASCOMドライバーからDOG E-ZEUSプロトコルに接続してみました。
ASCOMドライバー EZEUS.Telescope を選択して、Cartes
du CielからDOG E-ZEUSプロトコルに接続しました。
接続は、問題なくできました。
徹底的なテストはしていませんが、コントロール、初期設定(同期)、自動導入は正常に動作しました。
また、ミードプラグイン(LX200)と同様に、とても快適で使いやすいASCOMドライバーだと感じました。
TheSkyも試しましたが、何故か?、EZEUS.Telescopeが表示されませんので今のところ分かりません。
・Super StarIVも調べていますが、(無料お試し版)のため制約が多く正確に調査できていません。
しかし、一応画面上で自動導入が行われているように見えます。(制約のため、モータパルス「周回ステップ数」が設定できない)
・それから、ASCOM POTHは、アプリケーションソフト側でASCOMドライバーを通じて接続する必要がありました。
残念ながらYocで利用するのは難しいようです。
(2010,2/9)
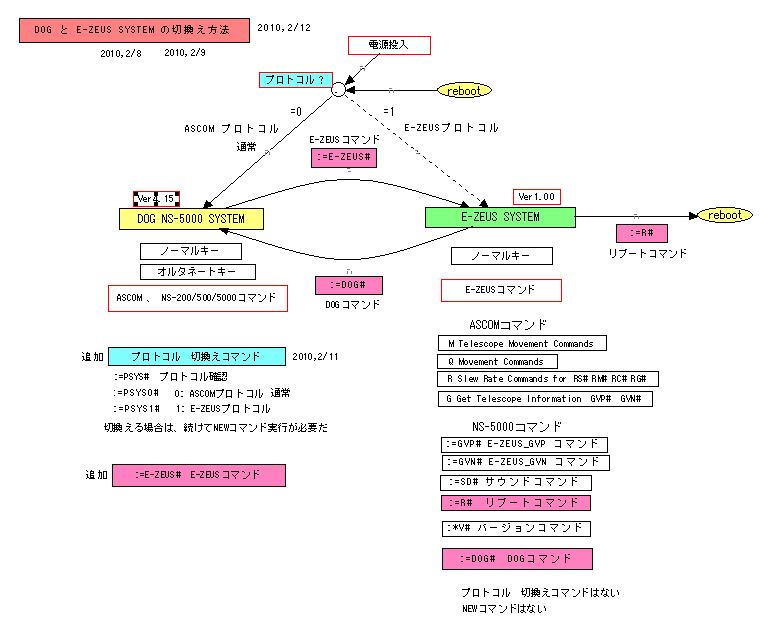
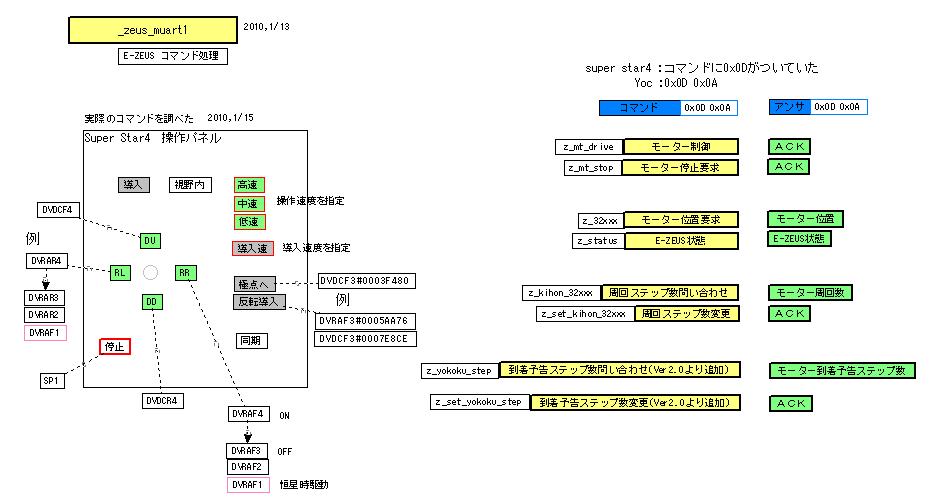
■新しいプロトコル(コマンド)の続きです。
DOG NS-5000からE-ZEUS切換え用として、コマンドを追加しました。
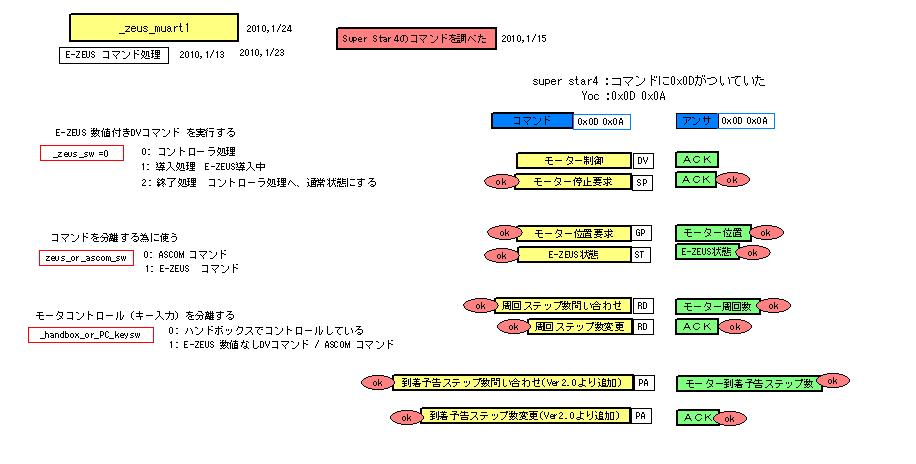
また、E-ZEUSプロトコル(Ver1.00)の状態で対応するコマンドは下図のとおりです。
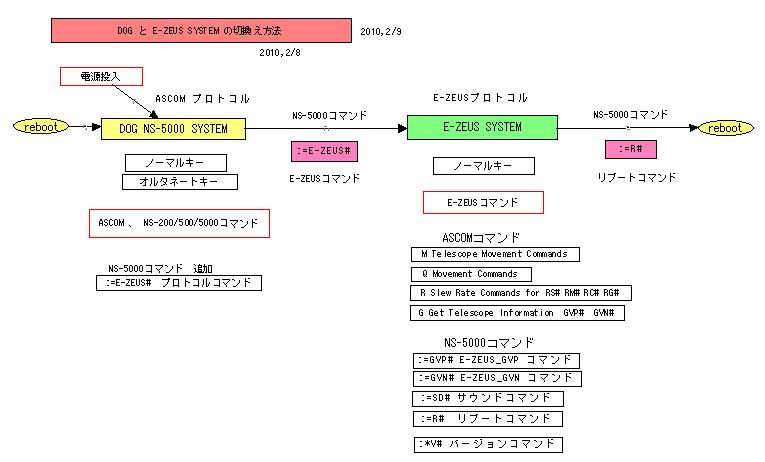
■E-ZEUSプロトコルは、DOG NS-5000 Ver4.15 で実装する予定です。
その他に、スピードテーブルの基本クロック機能を改良する予定です。
この改良で、従来のスピードテーブルよりも、広範囲のスピード(低速から高速まで)をカバーできるようになります。
特に高速マイクロステップ駆動に有効だと思います。
■8番 新型RS232Cステッピングモータードライブ にE-ZEUSプロトコルを実装できないか検討する予定です。(2009,12/28)をご覧ください。製品や機能などについて、ご意見ご希望がございましたらメールを頂ければ幸いです。
(2010,2/5)
■新しいプロトコル(コマンド)の続きです。
E-ZEUSプロトコル実装作業において2,3機能を拡張しました。
・DOG E-ZEUSプロトコルでは、モータ速度が3速から4速に増えました。
4速はDOGで定義しているものです。E-ZEUSは3速で導入システムを実現していますので、以下の様に割り当てました。
DOG E-ZEUSプロトコル
E-ZEUSシステム
最高速 <=
高速
高速 <=
中速
低速 <=
低速
ガイドスピード
・50速のスピードテーブルを内蔵しています。DOGのスピードテーブルと同じものです。
従って最高速度の指定や高速、低速、ガイドスピードを個別に可変することができます。
・ハンドボックスのSELキーを操作すると4速をご利用いただけます。
最高速 > 高速 > 低速 > ガイドスピード > 最高速・・・
・ASCOMに対応しています。LX200コマンドが使えます。
PHD Guiding、GuideDog、Guidemaster、AstroSnap・・・など各種オートガイドソフトをご利用いただけます。
パソコン側から、4速で望遠鏡コントロールができます。
・赤経、赤緯バックラッシュ補正します。DOGと同じものです。
操作性の向上のほか、オートガイドに効果があります。
(2010,2/4)
■新しいプロトコル(コマンド)の続きです。
プロトコル実装作業はだいたい完了したと思います。
数値付DVコマンドの部分をプログラミングして、Yocの画面上で天体自動導入を試したところ、正常に目標天体を導入できました。西側の天体導入では繰り返し天体導入を試しましたが問題なく導入できました。
しかし、東側では、初めに「位置合せ」(Yoc-天体の情報)を行うと自動導入は問題ありませんが、
続けて導入をすると途中で望遠鏡位置マークが画面上で少しシフト?する現象が起こりました。
東西のどちらも同じコマンドを使っているので不思議ですが、「位置合せ」をすれば問題ありません。
いずれこの症状の理由は分かると思います。
■E-ZEUSプロトコルはNS-5000に内蔵する予定です。
今回の実装作業ではE-ZEUSの他にASCOMも対応できるように工夫しました。
プロトコルの性質(特に通信手順)が異なりますが、どちらにも対応できます。
従ってE-ZEUSプロトコルの状態で、ASCOMコマンドによる、モータのコントロール、オートガイドが可能です。
DOGはASCOM POTH(1チャンネルのRS232Cで複数のアプリケーションと接続する)に対応しています。
そのためSuper StarIV , Yoc も POTHに対応できる可能性があります。
成功すればYocで天体自動導入をしながらPHD
Guiding でオートガイドができるでしょう。
結果が出ましたらお知らせします。
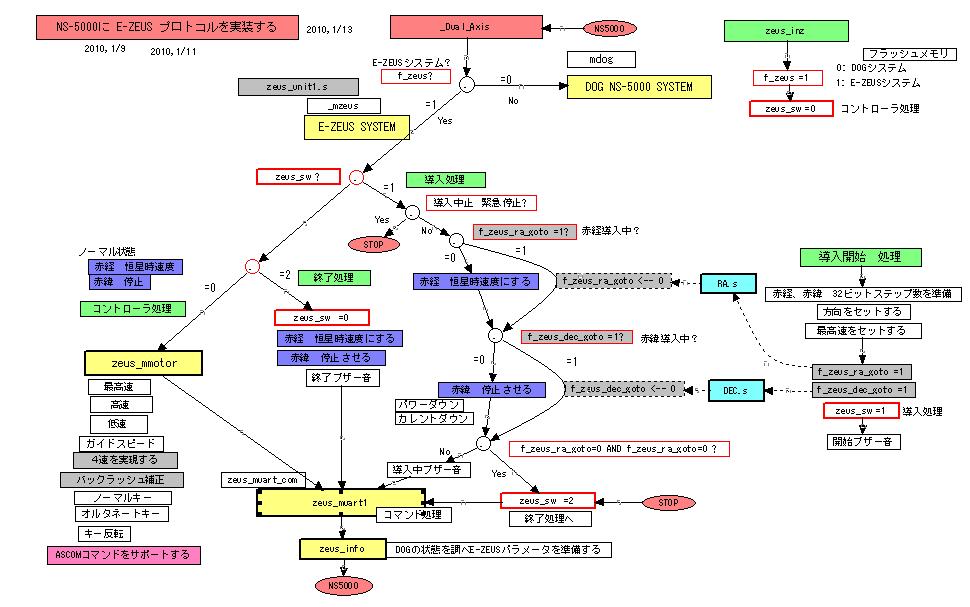
メインプログラムは以下のような構造に落ち着きました。
これが最も簡単なE-ZEUSプロトコル実装方法だと思います。
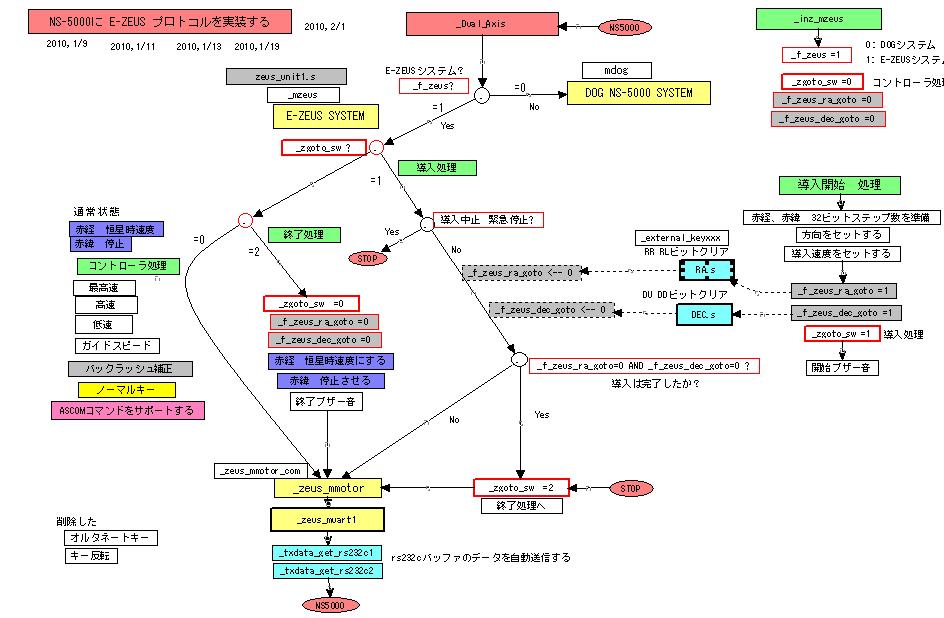
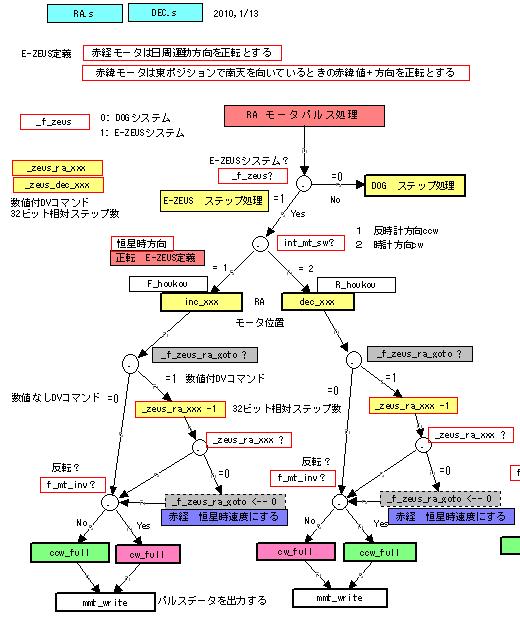
それから、モータ制御コマンド(DVコマンド)の参考図を公開します。
数値付DVコマンドは自動導入を実現します。重要な部分ですが、とてもシンプルな構造です。
(2010,1/24)
■新しいプロトコル(コマンド)の続きです。
E-ZEUSプロトコル実装作業は順調に進んでいます。
今日は「E-ZEUS状態コマンド」をプログラミングしました。だいたい完成しました。
あとは「モータ制御コマンド」のプログラミングと「移動命令の禁則」、「警告動作」を合理的に解決する必要があります。
「モータ制御コマンド」の数値付DVコマンドは次の重要な課題ですが、数値なしDVコマンドの方は完成しています。
今日の段階で、Super StarIVとYocに接続できました。また、高速、中速、低速で正常にコントロールできました。
また、Yocでは星図画面に望遠鏡位置マークが表示され、とりあえず方向はデタラメですが、コントロールに合わせて移動しました。モータも正常に動いています。
赤経、赤緯にバックラッシュ補正機能を実装しました。
また、ASCOM(LX200コマンド)にも対応させましたので、PHD
Guiding 、Guidemaster・・・などで直接オートガイドができるようになると思います。
(2010,1/20)
■新・旧アトラクス赤道儀の最高速度等について大変興味深いメールを頂きましたので、ご紹介します。
非常に正確で信頼できるデータだと思います。
■NEWアトラクス赤道儀NS-5000 (オリエンタルモータ
PK243A1に交換しています)
赤道儀については(2009,7/7)(2009,7/8)をご覧ください。
(2010,1/12)
4分割-24V駆動でRA:380倍速、DEC420倍速となっています。
これは、クランプを力一杯締めた状態にしてさらに手で赤道儀が動かない様にした状態です。
この状態でモーター駆動力でクランプが滑る(モーターは回っている)という絶対に脱調しない速度です。
以前TOA150を搭載した時よりも当然過酷な状態なのですが、眼視でも十分満足出来る速度となっています。
しかし、写真撮影のみであれば一晩に2天体がいいとこなので高速導入にそれほど拘る必要ありませんね。
それから、気付きがあります。
星図ソフトでASCOMの中のLX200(POSも同じ)を選択すると自動導入中に望遠鏡の
トラッキングがかなり暴れる(関係ない所へ飛んだりする)
現象がありますが、ASCOMじゃなくてミードLX200のドライバをリンクさせるとこの現象は起こりませんでした。
暴れても最終的には目標天体へミートします。
幸いNS5000はCOMが2ポートあるのでASCOM(THE SKY)とミード(Ciel)と両方つないで同時表示させて解ったのですがトラッキングが暴れるのは表示上だけの問題みたいです。
Cielの方は暴れてませんでした。
但しCielもASCOMを選択すると暴れます。
結局、自動導入もおかしくないので安心しました。
DOGユーザーで不安に思う方がいらっしゃったら教えてあげて下さい。
ASCOMドライバの安定度は?かも知れません。
(2010,1/13)
ところで今日、24V電源をACアダブターから工業用のちゃんとした?電源に繋いで
NS-5000を動かしたところ、先程メールした過酷な条件でさらに最高速が上がりました。
RA側は380倍速が400倍速とわずかでしたがDEC側は420倍速から560倍速にUPしました。
600倍速でも問題なく動きます。
この速度になると140倍速の差はわかりませんね。
モーター音を聞いて、てっきり同じ速度かと思っていました。
電源の電気の質?が良いのではと勝手に想像しています。
電源の違は、スピードに影響を与える可能性がある事を示しています。
電源は車載バッテリーや安定化電源が有利だと思います。(内部抵抗が低いので)
電源容量は、以下を目安にして下さい。
NS-201/501/5000 GPD、SP/DX赤道儀 1A以上
NS-201/501/5000 旧アトラクス赤道儀 2A以上
NS-201/501/5000 NEWアトラクス赤道儀 PK243A1
3A以上
■旧アトラクス赤道儀NS-5000 モータは純正のままです。赤道儀の写真は(2010,1/8)をご覧ください。
NS-5000は高圧用の部品と交換して、電源12V----36V対応に改造しています。
(2010,1/17)
西岡様
久しぶりに晴れましたので早速NS-5000高速版のテストをし
ました。
気温-6.8℃、電圧は使用電源最大の36V(正確には35.8~35.9V)
、望遠鏡のバランスは少々狂った状態(通常のバランスにビデ
オカメラ装着)です。
結果です。両方向に脱調することなく動作する最大速度は、
新しく用意していただいたスピードデータで赤径は32番=160
倍速、赤緯は45番=225倍速でした。
日中は赤径は35番=175倍速でしたので、暖かい季節ならば
もう少し上げることができるかもしれません。が、全天を自動
導入で振り回すような使い方をするわけではありませんので、
実用上充分だと思います。
自己満足かもしれませんが、手持ちの機材から最大限のパフ
ォーマンスを引き出せることになります。忙しい中、親切に対
応していただき、ありがとうございました。
別件で質問です。ハーフステップから16分割に変更する際
、同じスムーズな加速の効果を得るには、加速に要するステッ
プ数を8倍に増やす必要があるのでしょうか。16分割を試し
た際に、ハーフステップのようなスムーズな加速感がなかった
ものですから。よろしくお願いします。
マイクロステップを1/16分割にするとステップ角が1/16になります。
例えば、加速パルスとバックラッシュ量を、1/2分割(ハーフステップ)で登録した場合、1/16分割に変更すると、
相対的に1/8になりますので、同じ加速度、同じバックラッシュ効果を得るには、それぞれを8倍する必要があります。
; 加速、減速パルス コマンド
; RA
DEC
; :=CRUxxxx# :=CDUxxxx# 加速パルス(係数)を設定する
xxxx16進数
; :=CRDxxxx# :=CDDxxxx# 減速
(2009,7/27)を参照して下さい。
:/BRxxxx#
赤経バックラッシュ量 を xxxx にする
16進
:/BR#
確認
;
:/BDxxxx#
赤緯バックラッシュ量 を xxxx にする
16進
:/BD#
確認
赤緯バックラッシュの影響が最小になるように、バックラッシュ量を増減してください。
ガイドスピードにして、高倍率の望遠鏡で恒星の動きを見ながら、バックラッシュ量を調整します。
(2010,1/17)
■新しいプロトコル(コマンド)の続きです。
実装を目指しているプロトコルは、良く知られているE-ZEUSという天体自動導入装置で使われているものです。
E-ZEUSの詳細は「ZEUSプロジェクト技術資料」で公開されています。また、プロトコルはE-ZEUS
通信コマンドに解説があります。
これまで何度もDOGの開発において資料を参考にさせて頂きました。この場を借りてお礼申し上げます。
新しいプロトコルは、今後の開発をスムーズに進めるために、現状のNS-5000システムに影響が出ない様に検討しています。
また、なるべくプロトコルが簡単で小さく実現できるように、NS-5000の有用なプログラムを利用することにしました。
参考までに概要をご紹介します。この部分はシンプルですが、プロトコル全体のメインになると思います。
この図を見ながらアセンブリ言語でプログラミングが出来そうです。
簡単なE-ZEUSシュミレータもどきを作りながら、SUPER
STAR4,Yoc(ZEUS専用の星図ソフト)のコマンドを調査しました。
下図はその時のメモです。Yocはうまくいきませんでしたが、SUPER
STAR4(無料お試し版)はだいたい予想どおりのコマンドを出力しました。
(2010,1/8)
あけましておめでとうございます。
本年もよろしくおねがいします。
■新年早々にNS-5000旧アトラクスのお客様からメール、写真を送って頂きました。
赤道儀周りの様子や旧アトラクスの速度、電源など大変興味深い内容でしたので、ご紹介します。
西岡様
新年明けましておめでとうございます。ようやく観測室が完成
して体制が整いました。写真を送ります。
アトラクスに載っているのは、C14で過積載と思われますが
、24V、ハーフステップで赤経側120倍速、赤緯側150
倍速で問題なく動いています。
スライドルーフ内で風の影響が少ないこともありますが、アト
ラクスはたいした赤道儀だと思います。惚れ直しました(笑)
コントローラーが載っている台は、ピラー脚に鏡筒バンドを使
って取り付けているので、操作しやすい位置に回転することが
できます。NS5000のサポートを得て、アトラクスがいっそう使
いやすくなると思います。
架台の下の電源は36Vまで出せます。NS5000がより高性能に
なるのでしたら、改造をお願いするかもしれません。
では、本年もいろいろお世話になるとおもいます。よろしくお
願いします。

NS-5000のマイクロステップ・ドライバは、最大動作電圧が40Vあります。
現状は電源12-24Vまでですが、高圧用の部品と交換すれば36Vに対応できます。
旧アトラクスは、12Vで50-60倍速程度、24Vで120-180倍速で動くのを確認しています。
36Vならもっと高速駆動ができる可能性があります。
お客様から36V対応のご依頼をいただきました。結果が出ましたら、ご紹介します。
(2009,12/28)
今年も残りわずかとなりました。
2009年はマイクロステップ実用化が一番の成果だったと思います。
オートガイダー天体自動導入装置DOG NS-5000とエンコーダー方式DOGナビゲータNS-300の開発で、いろいろな経験を積むことができました。これは、来年の新しい製品開発の土台になると思います。
2010年の目標を考えています。
■4番 新しいプロトコル(コマンド)は、私の好奇心から検討を始めました。
DOGはASCOM対応のために、ミードLX200コマンドを実装しました。(コマンドは、Meade
Telescope Serial Command Protocolを参考にしました)現在の天体自動導入機器の標準プロトコルは、このLX200コマンドが事実上の世界標準だと思います。
すでにASCOMに対応しているので特に必要性はないのですが、ユニークなプロトコルがあり、そのコマンドを実装できないか興味がありました。まだ少し不明なところが残っていますが実現できると考えています。
概要設計はだいたいできました。あとはフローチャートを書いてプログラミングとなります。
もしも実用化のめどが立ちましたら、新しいDOGを作るか、あるいはNS-5000にプロトコル増設したいと思います。
これによりDOGの守備範囲が少し広くなるかもしれません。
■7番 デジタルカメラ用 自動タイマー(仮称)
10年前までNS企画は神奈川県海老名市に事務所がありました。そのころからお世話になっている神奈川県のお客様(オートガイダーVSTユーザー)からのご依頼で製作を進めているもので、来年早々には部品が用意できて製作に入る予定です。
デジタルカメラを直接制御します。7セグメントLED表示器を使って、撮影回数、露出時間、インターバル時間を設定できます。タイマーの詳細はお客様が独自に考案されたもので、高機能で実践的なタイマーです。
(2009,12/15)
■EM200,NJPのモータは、もう少し時間がかかりそうです。
モータは特注品になります。少し様子を見ながら決めようと思います。
■NS-200/500/5000ではPIC24FというCPUを使ってきましたが、
試しに互換性のある dsPIC33Fという同じ16Bit CPUにシステムを移植してみました。
二つのCPUは、機械語レベルから同じで、周辺モジュールと機能はほぼ上位互換性があるそうです。
つまり、PIC24FをdsPIC33Fにそのまま差し替えても動くらしいので、
試しにプログラムを修正しコンパイルをしたところ、簡単に成功しました。
実際にCPUに書き込んでNS-5000を動かしていませんが、Windowsのシュミレータ上では正常に動作しています。
おそらく、dsPIC33F版のNS-5000はそのまま動くだろうと思います。
dsPIC33Fは、PIC24Fに比べ、プログラム、RAM、スピードのいずれも大幅にグレードアップしています。
特に処理スピードは40 MIPSあり、天体自動導入速度は100Kppsに届く可能性があります。
もしも100Kppsを達成できたら、かなり手前味噌ですが、世界中に天体自動導入機器は8Bit,16Bit,32Bit
といろいろありますが、最高速レベルに近いかも?知れません。
プログラムメモリ
RAM
スピード
NS-5000最高速度
PIC24F64GA
64KB
8KB
16 MIPS
約42Kpps
dsPIC33FJ128GP 128KB
16KB
40 MIPS
約100Kpps?
100Kpps は以下のスピードに相当します。
恒星時100ppsのマイクロステップなら、1000倍速
NJP (50pps2相フルステップ、1分割) 2000倍速
EM200 (25pps1-2相ハーフテップ、1/2分割) 4000倍速
EM10 (12.5pps2相フルステップ、1分割) 8000倍速
GPD (20pps1-2相ハーフテップ、1/2分割) 5000倍速
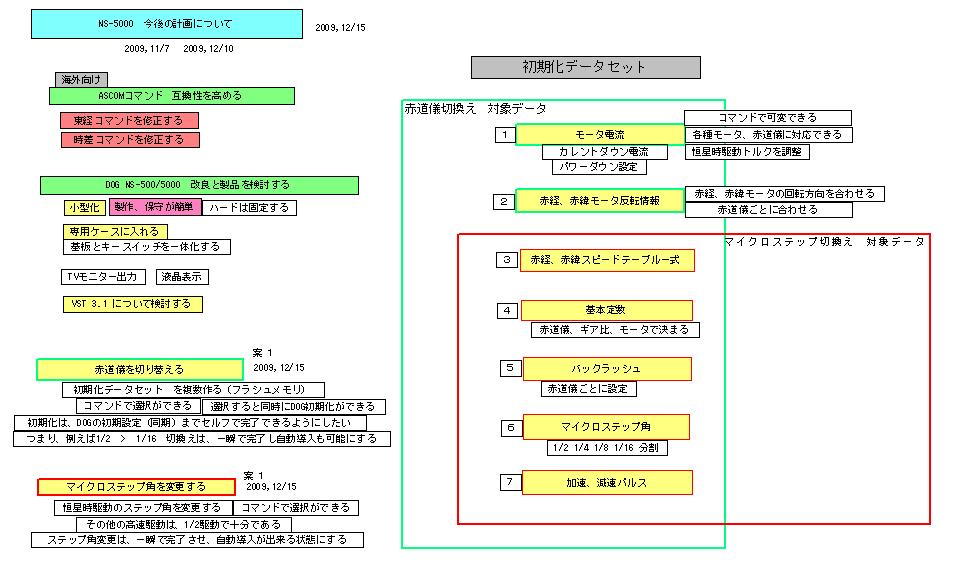
■マイクロステップ、赤道儀の切換えについて検討しています。
マイクロステップ角の変更と赤道儀の切換えは、その都度、スピードテーブル、基本定数などを初期化する必要があります。
NS-5000では、この辺の作業がお客様にはわかりずらく、いちいち初期化するのが大変だと思います。
お客様からのご要望もあり、この作業をもっと簡単な方法で済ませれないか検討しています。
製品や機能などについて、ご意見ご希望がございましたらメールを頂ければ幸いです。
 このホームページで公開するハードウエアー、ソフトウエアーなどの情報、データ、その改造、応用したものの公開や営利目的の販売などをお断りします
このホームページで公開するハードウエアー、ソフトウエアーなどの情報、データ、その改造、応用したものの公開や営利目的の販売などをお断りします
■DOG NS-501GPを作りました。
正面のオートガイド端子は、お客様のご希望でLX200ではなくAGA-1互換にしました。
それから、背面のモータ接続コネクタは、これまでアンフェノールコネクタを使ってきましたが、
どうも取り扱い店が少ないようでしたので、Dサブコネクタに変更することにしました。

|

|
DOG
NS-501GP
このホームページで公開するハードウエアー、ソフトウエアーなどの情報、
データ、その改造、応用したものの公開や営利目的の販売などをお断りします
[HOME]